- Характеристики звеньев систем автоматики

Содержание
- 2. Динамические характеристики Характеристика (в технике) – графическое или табличное выражение зависимости одного параметра от другого. Зависимость
- 3. Многомерное звено Многомерное звено с одним выходом
- 4. Одномерное звено (1.4) Временные характеристики
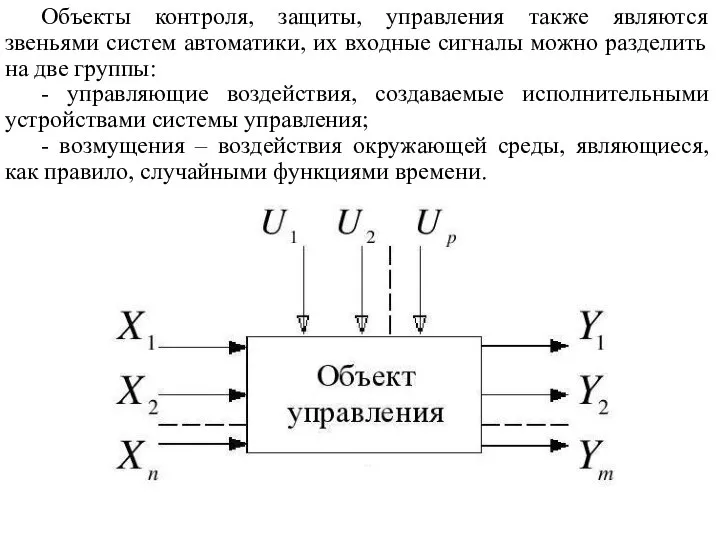
- 5. Объекты контроля, защиты, управления также являются звеньями систем автоматики, их входные сигналы можно разделить на две
- 6. Выходными сигналами объектов контроля и управления являются переменные их состояния. Переменные состояния объекта контроля, которые измеряются
- 7. Установление характеристик Отдельные звенья описываются известными физическими законами, аналитическими зависимостями. Рассмотрим пример: звено состоит из терморезистора,
- 8. Для получения характеристики звена в численном виде необходимо выполнить реализацию математической (аналитической) модели звена, основой которой
- 9. Эмпирическое исследование (эксперимент, наблюдение) может быть выполнено как на реальном звене, так и на физической модели
- 10. Структурное моделирование Структурное моделирование звена – разработка математической модели звена путем математического описания отдельных частей звена.
- 11. Электрическая подсистема описывается вторым законом Кирхгофа (1.9) (1.10) Механическая подсистема описывается вторым законом Ньютона для вращательного
- 12. (1.12) (1.13) Математическая модель электродвигателя постоянного тока независимого возбуждения имеет вид: Модель (1.13) является имитационной, она
- 13. В имитационных моделях присутствуют системы уравнений, которые решаются при реализациях моделей. Реализация имитационной модели на компьютере
- 14. (1.15) (1.16)
- 15. Аналитическая модель электродвигателя постоянного тока независимого возбуждения (1.17)
- 16. (1.18)
- 17. Аналитическая модель электродвигателя постоянного тока независимого возбуждения в данном случае имеет вид: (1.19)
- 18. Основой аналитической модели является аналитическая зависимость, связывающая выход с входами. Структурное моделирование системы автоматики – разработка
- 19. Линейные и нелинейные звенья По виду дифференциальных уравнений, описывающих рабочие процессы, звенья систем автоматики делятся на
- 20. В общем виде линейное ОДУ звена при n входах выглядит следующим образом (1.20)
- 21. Квазилинейное дифференциальное уравнение (1.21) Линеаризация замена функций F(y) и линейными выражениями
- 22. 1. Применение допущений. Оно заключается, в том, что некоторые члены в линеаризуемых функциях могут быть незначимыми,
- 23. 2. Использование методов линеаризации: хорды и касательной, малых колебаний. Уравнение прямой, в данном случае хорды, имеет
- 24. Уравнение касательной Для получения более точного линейного выражения вида угловой коэффициент k следует определить как среднее
- 25. Метод малых колебаний используется в случаях, когда значение функции выхода мало отклоняется от некоторого заданного значения
- 26. Разложение функций в ряд Тейлора до членов с первыми производными:
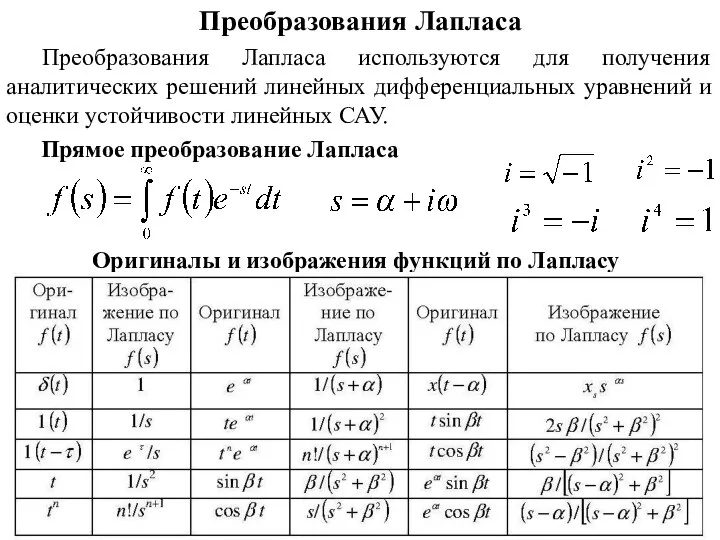
- 27. Преобразования Лапласа Прямое преобразование Лапласа Преобразования Лапласа используются для получения аналитических решений линейных дифференциальных уравнений и
- 28. Для преобразования Лапласа выполняется принцип суперпозиции, то есть преобразование Лапласа для суммы некоторых функций равно сумме
- 29. При помощи преобразования Лапласа можно найти начальное и конечное значения функции без вычисления ее оригинала: (1.23)
- 30. (1.24) (1.25) Решение дифференциального уравнения вида (1.23) при входе заданном функцией времени производится следующим образом. 1.
- 31. 4. Перенести полином левой части в правую. 5. Преобразовать правую часть к дроби с полиномами в
- 32. Функция W(s) равная отношению изображения по Лапласу функции выхода ys к изображению по Лапласу функции входа
- 33. Каждый выход звена имеет столько передаточных функций, сколько входов у звена. Звено с n входами и
- 35. Скачать презентацию
Динамические характеристики
Характеристика (в технике) – графическое или табличное выражение зависимости одного
Динамические характеристики
Характеристика (в технике) – графическое или табличное выражение зависимости одного
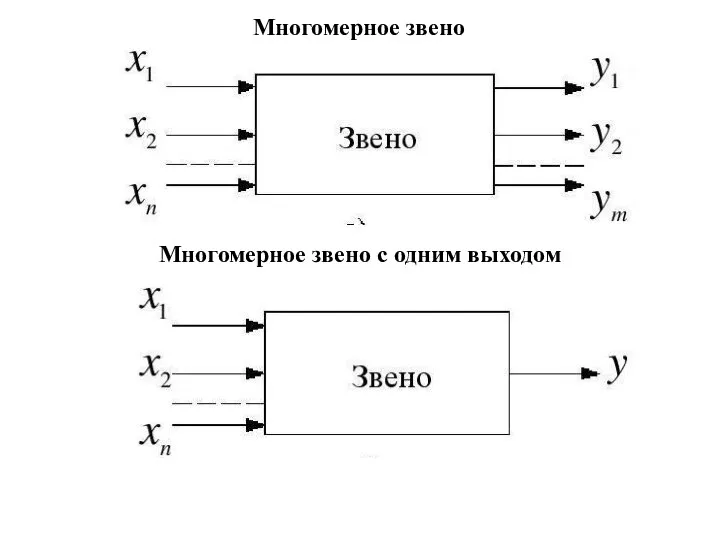
Многомерное звено
Многомерное звено с одним выходом
Многомерное звено
Многомерное звено с одним выходом
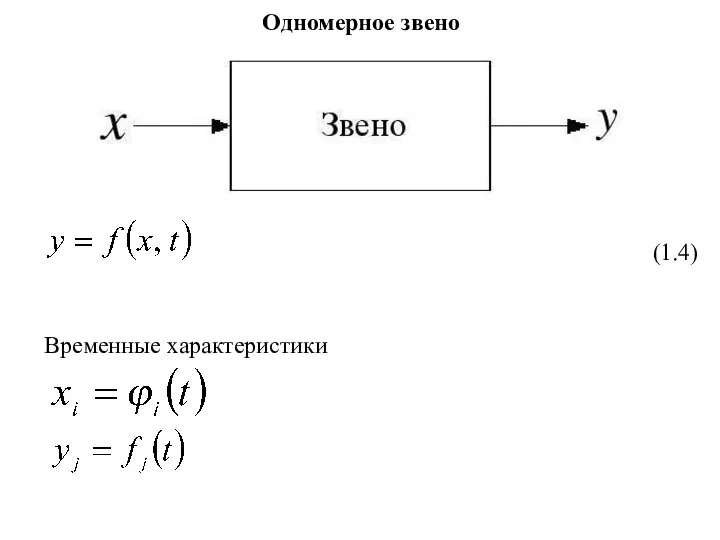
Одномерное звено
(1.4)
Временные характеристики
Одномерное звено
(1.4)
Временные характеристики
Объекты контроля, защиты, управления также являются звеньями систем автоматики, их входные
Объекты контроля, защиты, управления также являются звеньями систем автоматики, их входные
Выходными сигналами объектов контроля и управления являются переменные их состояния.
Переменные состояния
Выходными сигналами объектов контроля и управления являются переменные их состояния.
Переменные состояния
Установление характеристик
Отдельные звенья описываются известными физическими законами, аналитическими зависимостями. Рассмотрим пример:
Установление характеристик
Отдельные звенья описываются известными физическими законами, аналитическими зависимостями. Рассмотрим пример:
Для получения характеристики звена в численном виде необходимо выполнить реализацию математической
Для получения характеристики звена в численном виде необходимо выполнить реализацию математической
Эмпирическое исследование (эксперимент, наблюдение) может быть выполнено как на реальном звене,
Эмпирическое исследование (эксперимент, наблюдение) может быть выполнено как на реальном звене,
Структурное моделирование
Структурное моделирование звена – разработка математической модели звена путем математического
Структурное моделирование
Структурное моделирование звена – разработка математической модели звена путем математического
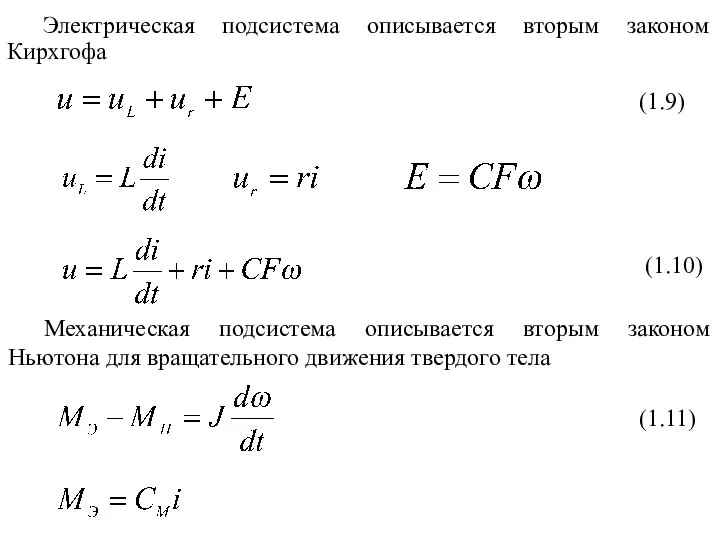
Электрическая подсистема описывается вторым законом Кирхгофа
(1.9)
(1.10)
Механическая подсистема описывается вторым законом Ньютона
Электрическая подсистема описывается вторым законом Кирхгофа
(1.9)
(1.10)
Механическая подсистема описывается вторым законом Ньютона
(1.12)
(1.13)
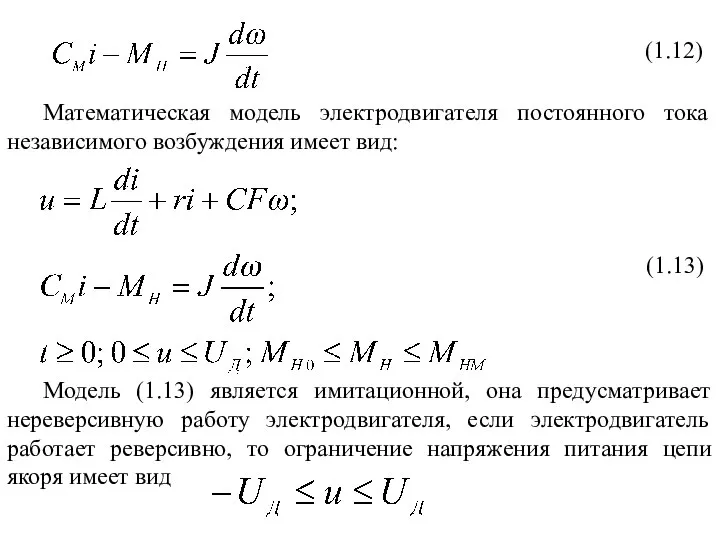
Математическая модель электродвигателя постоянного тока независимого возбуждения имеет вид:
Модель (1.13) является
(1.12)
(1.13)
Математическая модель электродвигателя постоянного тока независимого возбуждения имеет вид:
Модель (1.13) является
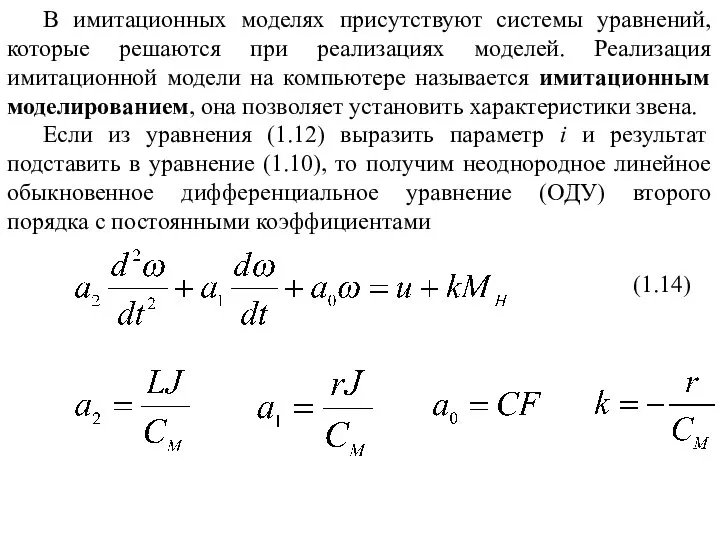
В имитационных моделях присутствуют системы уравнений, которые решаются при реализациях моделей.
В имитационных моделях присутствуют системы уравнений, которые решаются при реализациях моделей.
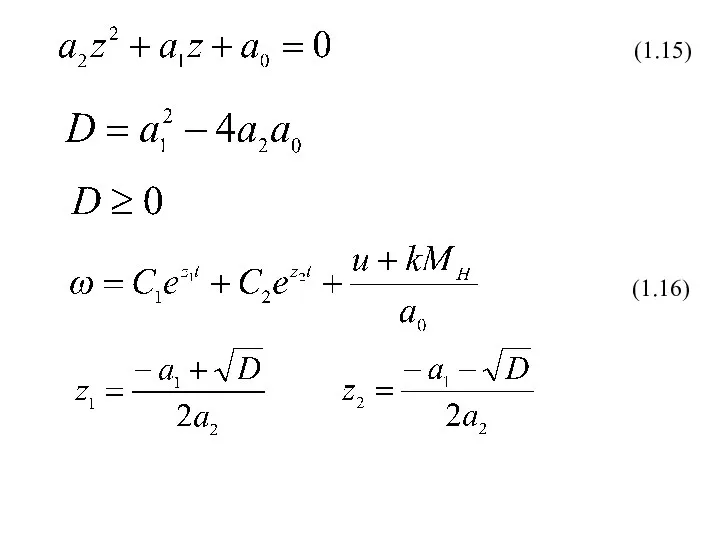
(1.15)
(1.16)
(1.15)
(1.16)
Аналитическая модель электродвигателя постоянного тока независимого возбуждения
(1.17)
Аналитическая модель электродвигателя постоянного тока независимого возбуждения
(1.17)
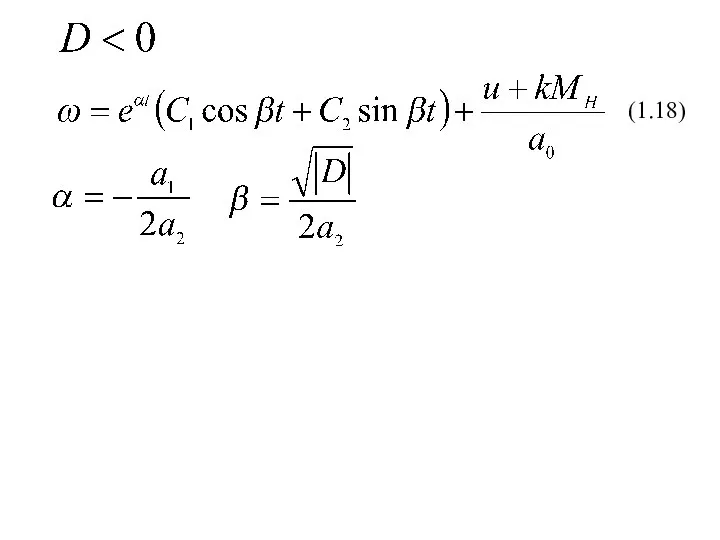
(1.18)
(1.18)
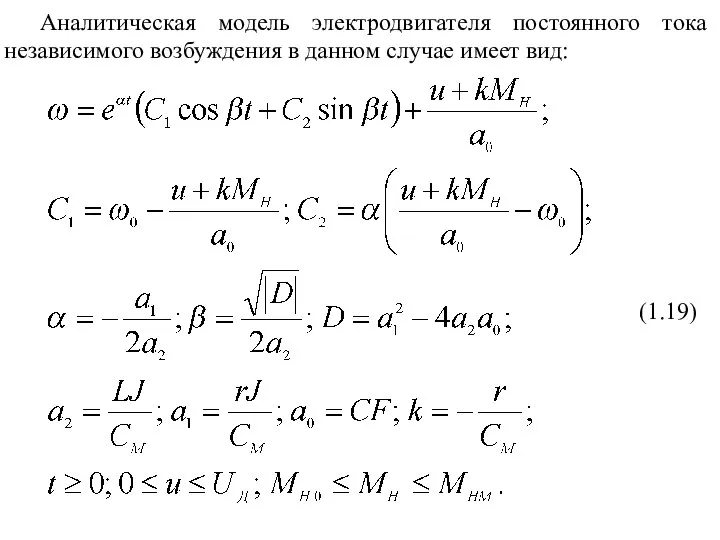
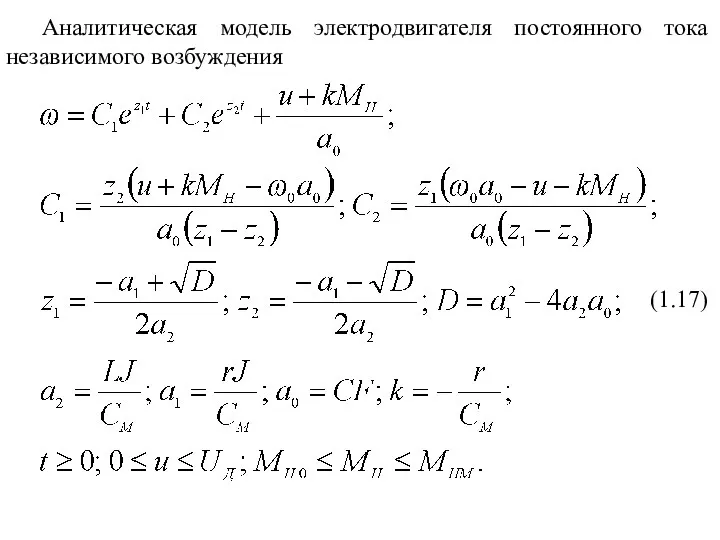
Аналитическая модель электродвигателя постоянного тока независимого возбуждения в данном случае имеет
Аналитическая модель электродвигателя постоянного тока независимого возбуждения в данном случае имеет
Основой аналитической модели является аналитическая зависимость, связывающая выход с входами.
Структурное моделирование
Основой аналитической модели является аналитическая зависимость, связывающая выход с входами.
Структурное моделирование
Линейные и нелинейные звенья
По виду дифференциальных уравнений, описывающих рабочие процессы, звенья
Линейные и нелинейные звенья
По виду дифференциальных уравнений, описывающих рабочие процессы, звенья
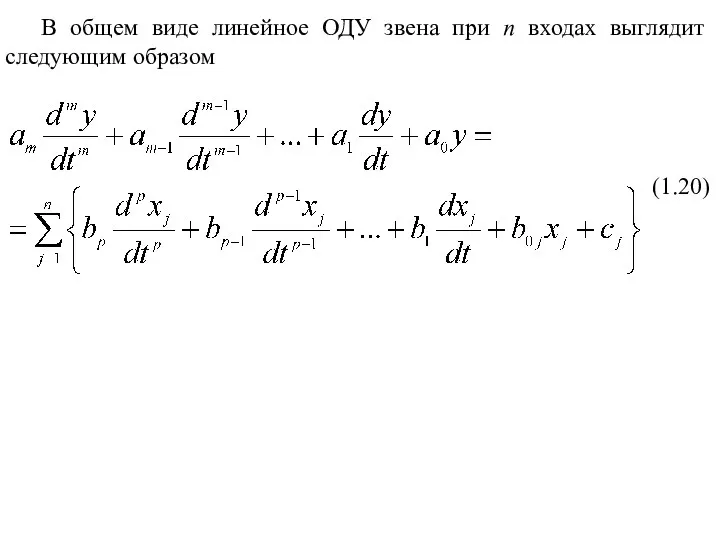
В общем виде линейное ОДУ звена при n входах выглядит следующим
В общем виде линейное ОДУ звена при n входах выглядит следующим
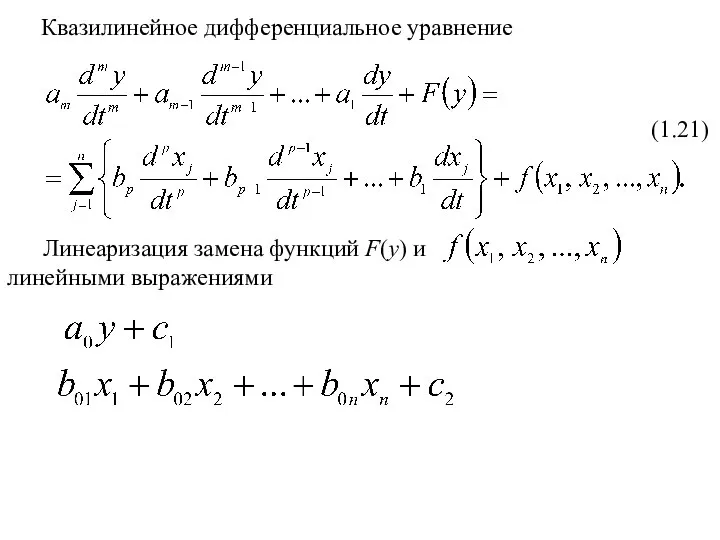
Квазилинейное дифференциальное уравнение
(1.21)
Линеаризация замена функций F(y) и
линейными выражениями
Квазилинейное дифференциальное уравнение
(1.21)
Линеаризация замена функций F(y) и
линейными выражениями
1. Применение допущений. Оно заключается, в том, что некоторые члены в
1. Применение допущений. Оно заключается, в том, что некоторые члены в
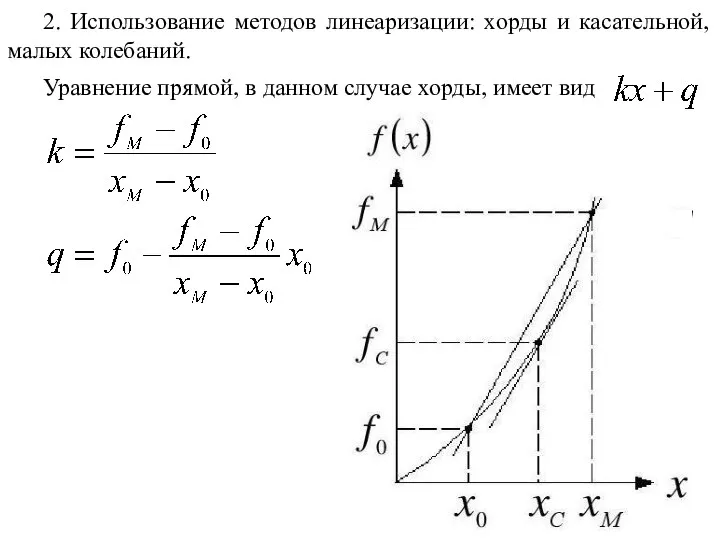
2. Использование методов линеаризации: хорды и касательной, малых колебаний.
Уравнение прямой, в
2. Использование методов линеаризации: хорды и касательной, малых колебаний.
Уравнение прямой, в
Уравнение касательной
Для получения более точного линейного выражения вида угловой коэффициент k
Уравнение касательной
Для получения более точного линейного выражения вида угловой коэффициент k
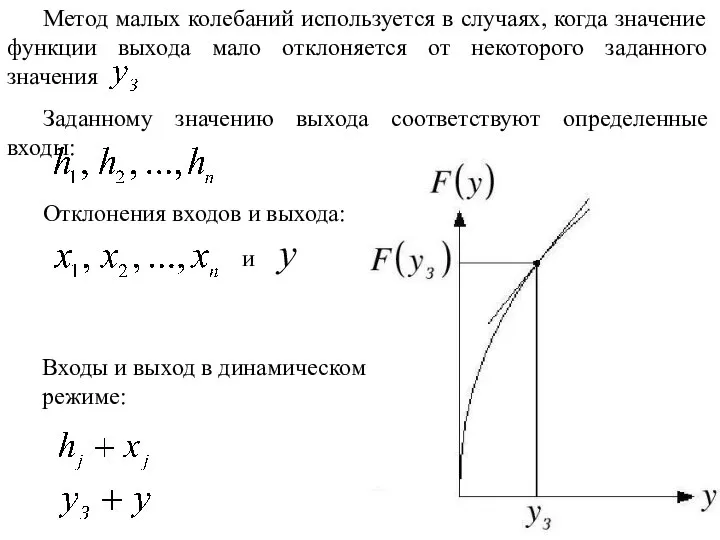
Метод малых колебаний используется в случаях, когда значение функции выхода мало
Метод малых колебаний используется в случаях, когда значение функции выхода мало
Разложение функций в ряд Тейлора до членов с первыми производными:
Разложение функций в ряд Тейлора до членов с первыми производными:
Преобразования Лапласа
Прямое преобразование Лапласа
Преобразования Лапласа используются для получения аналитических решений
Преобразования Лапласа
Прямое преобразование Лапласа
Преобразования Лапласа используются для получения аналитических решений
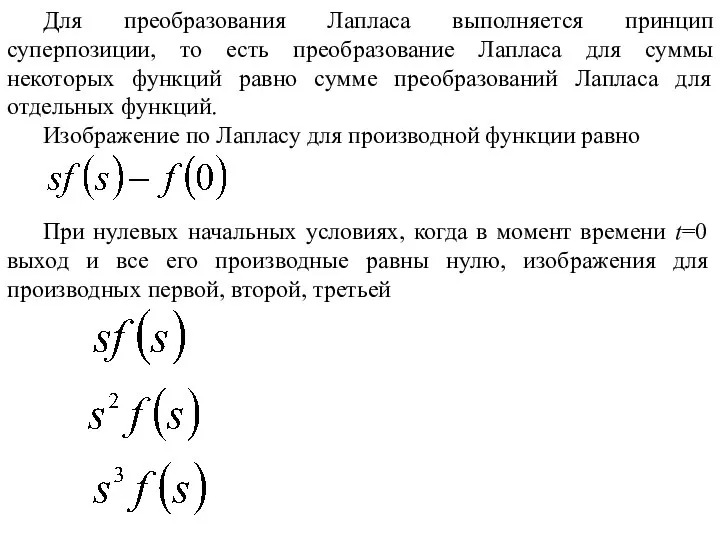
Для преобразования Лапласа выполняется принцип суперпозиции, то есть преобразование Лапласа для
Для преобразования Лапласа выполняется принцип суперпозиции, то есть преобразование Лапласа для
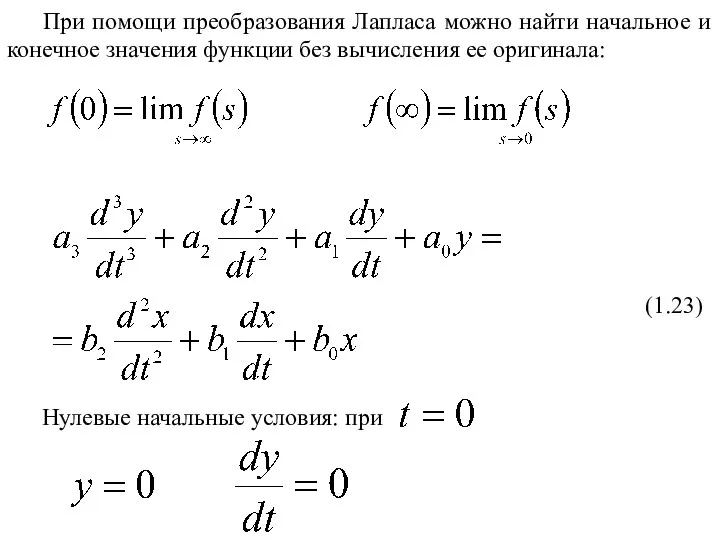
При помощи преобразования Лапласа можно найти начальное и конечное значения функции
При помощи преобразования Лапласа можно найти начальное и конечное значения функции

(1.24)
(1.25)
Решение дифференциального уравнения вида (1.23) при входе заданном функцией времени производится
(1.24)
(1.25)
Решение дифференциального уравнения вида (1.23) при входе заданном функцией времени производится
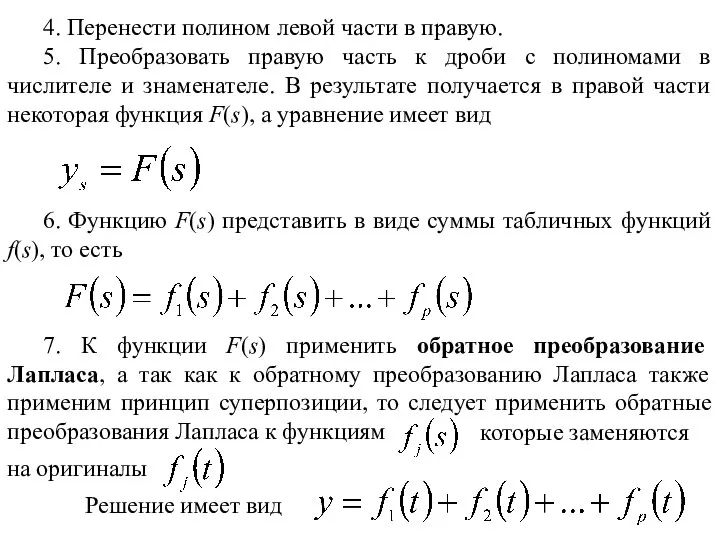
4. Перенести полином левой части в правую.
5. Преобразовать правую часть к
4. Перенести полином левой части в правую.
5. Преобразовать правую часть к
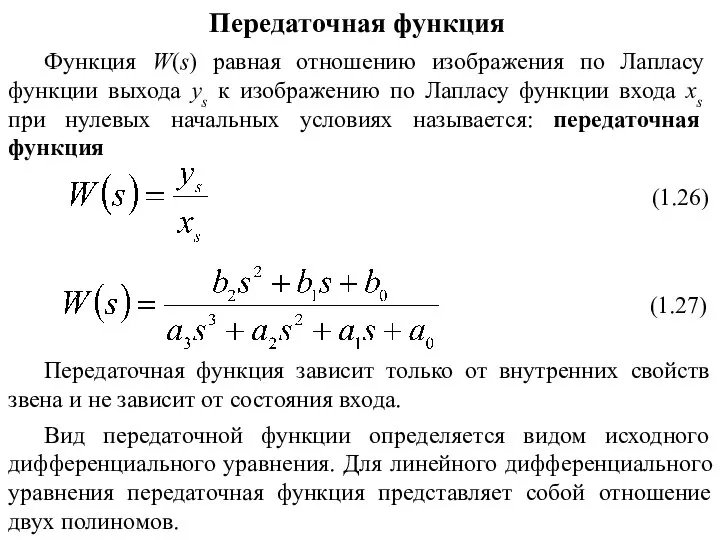
Функция W(s) равная отношению изображения по Лапласу функции выхода ys к
Функция W(s) равная отношению изображения по Лапласу функции выхода ys к
Каждый выход звена имеет столько передаточных функций, сколько входов у звена.
Каждый выход звена имеет столько передаточных функций, сколько входов у звена.
 Зависимость произведений фрактального искусства от вида математических формул
Зависимость произведений фрактального искусства от вида математических формул Процесс решения задачи, как вид деятельности учащихся
Процесс решения задачи, как вид деятельности учащихся Вычитание из чисел 6,7. Связь сложения и вычитания (1 класс)
Вычитание из чисел 6,7. Связь сложения и вычитания (1 класс) Параллельные прямые. Урок 1
Параллельные прямые. Урок 1 Квадратичная функция и ее свойства
Квадратичная функция и ее свойства Равнобедренный треугольник и его свойства
Равнобедренный треугольник и его свойства Веселый математический тест
Веселый математический тест Лекция 8. Минимизация. Элементы математической логики и теории автоматов (продолжение)
Лекция 8. Минимизация. Элементы математической логики и теории автоматов (продолжение) Тем, кто учит математику, Тем, кто учит математике, Тем, кто любит м
Тем, кто учит математику, Тем, кто учит математике, Тем, кто любит м Презентация на тему Число 10
Презентация на тему Число 10 Треугольник и его элементы
Треугольник и его элементы Теоремы Чевы и Менелая. 9 класс
Теоремы Чевы и Менелая. 9 класс Математика. Цели математики
Математика. Цели математики Как показать ученикам, что не всякая формула задает функцию и не всякую функцию можно задать формулой?
Как показать ученикам, что не всякая формула задает функцию и не всякую функцию можно задать формулой? Дроби и Проценты Зарецкий Ильяя 5а класс
Дроби и Проценты Зарецкий Ильяя 5а класс  Тема: «ДЕЛЕНИЕ» 5 класс Учитель: Сосмакова Л.Х.
Тема: «ДЕЛЕНИЕ» 5 класс Учитель: Сосмакова Л.Х. Практическое задание №2
Практическое задание №2 Презентация по математике "Магия чисел. Влияние чисел на судьбу человека" - скачать
Презентация по математике "Магия чисел. Влияние чисел на судьбу человека" - скачать  Деление Муниципальное бюджетное общеобразовательное учреждение средняя общеобразовательная школа №30 имени А.И.Колдунова
Деление Муниципальное бюджетное общеобразовательное учреждение средняя общеобразовательная школа №30 имени А.И.Колдунова  Радианная мера угла. Вращательное движение
Радианная мера угла. Вращательное движение Сложение в пределах 10
Сложение в пределах 10 Рисуем по координатам
Рисуем по координатам Смежные углы
Смежные углы Индивидуальные образовательные траектории в образовательной программе школы Опыт работы учителя математики МОУ «Цивильская С
Индивидуальные образовательные траектории в образовательной программе школы Опыт работы учителя математики МОУ «Цивильская С Решение уравнений. Элективный курс. Алгебра 11 класс. Урок 1
Решение уравнений. Элективный курс. Алгебра 11 класс. Урок 1 Сложение, вычитание многочленов и умножение на одночлен
Сложение, вычитание многочленов и умножение на одночлен История развития математики
История развития математики Графики функций y=tgx, y=ctgx
Графики функций y=tgx, y=ctgx