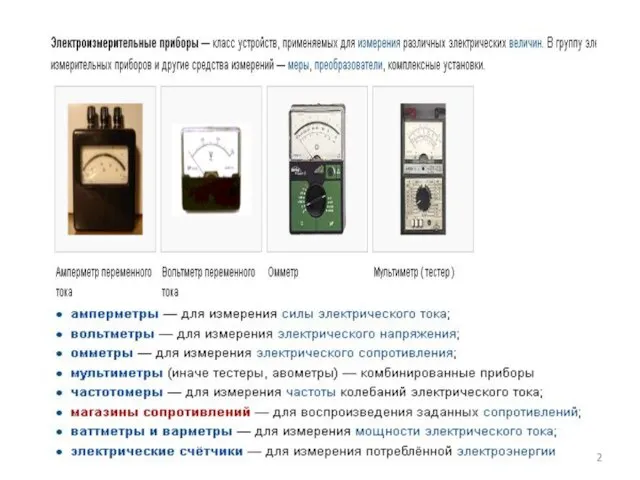
- Электроизмерительные приборы. (Лекция 9)

Содержание
- 4. Для любого измерения, необходимо оперировать какими-то эталонными величинами.Российский физик Б.С.Якоби предлагает за одну единицу электрического сопротивления
- 5. В развитии электроизмерительной техники конца второй половины XIX и начала XX ст. значительные заслуги принадлежат М.
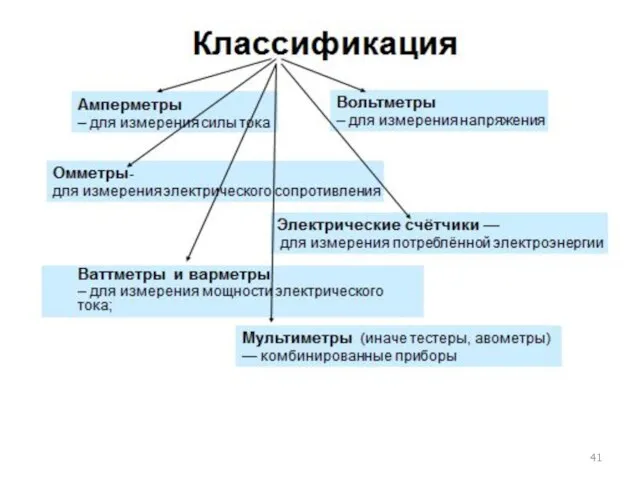
- 6. Классификация приборов Приборы магнитоэлектрической системы Приборы электромагнитной системы Приборы электродинамической системы Приборы электростатической системы
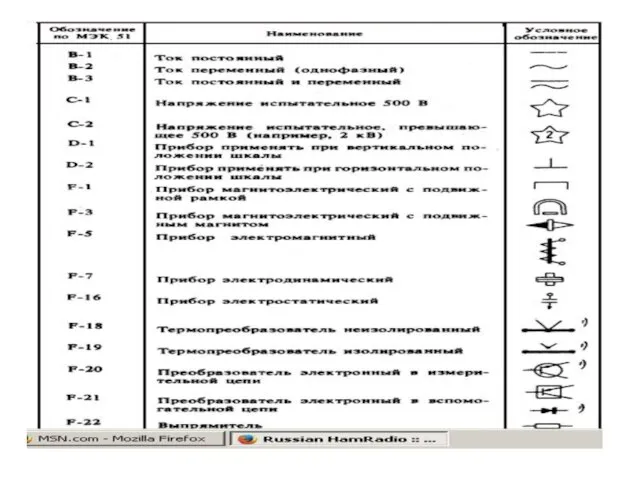
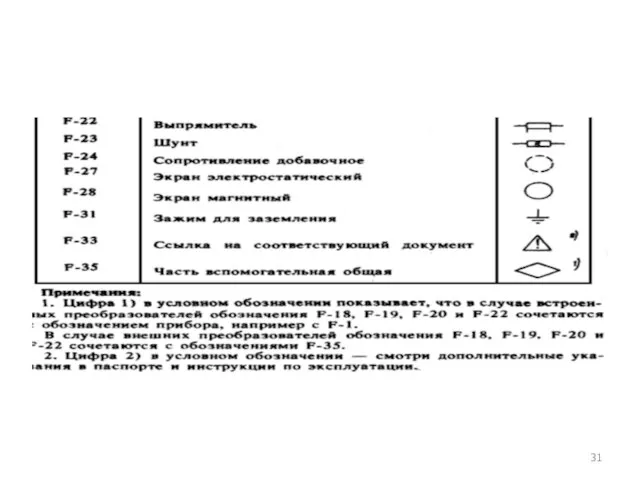
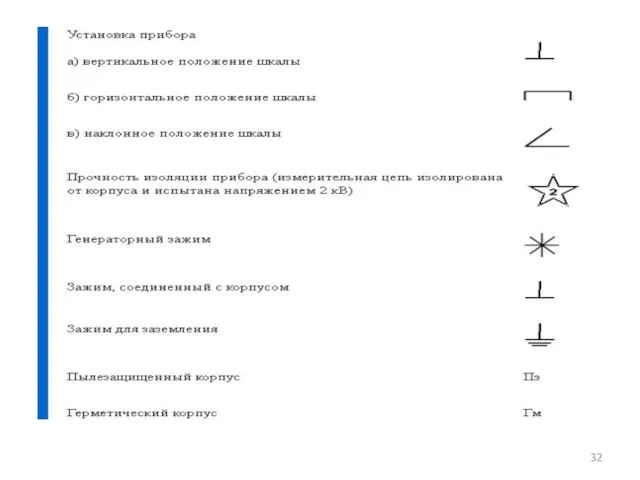
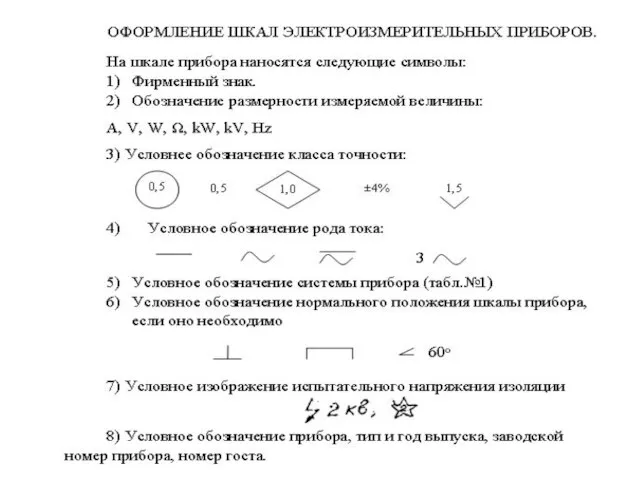
- 7. Условные обозначения систем приборов
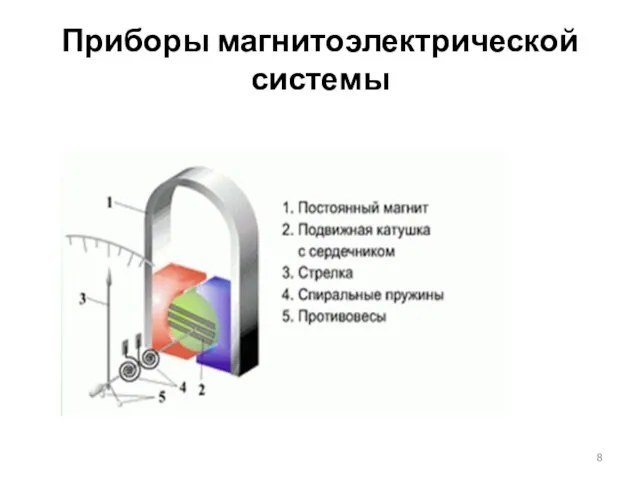
- 8. Приборы магнитоэлектрической системы
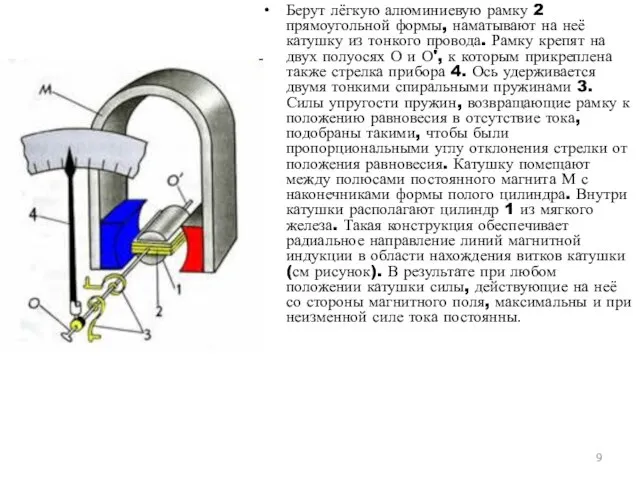
- 9. Берут лёгкую алюминиевую рамку 2 прямоугольной формы, наматывают на неё катушку из тонкого провода. Рамку крепят
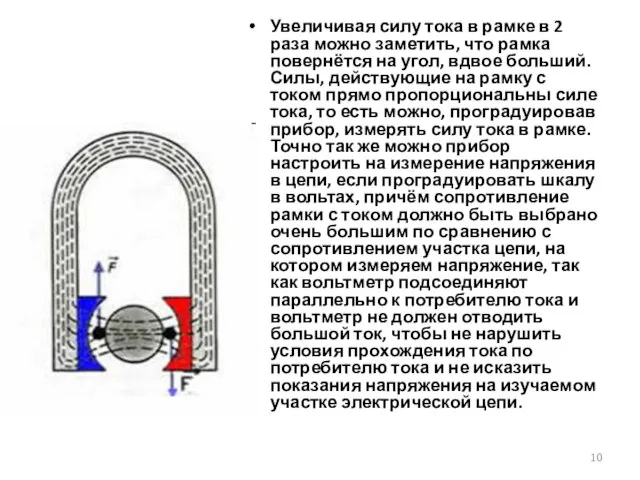
- 10. Увеличивая силу тока в рамке в 2 раза можно заметить, что рамка повернётся на угол, вдвое
- 11. Принцип действия. Подвижная часть перемещается в результате взаимодействия поля постоянного магнита с магнитным полем проводника с
- 12. На рамку действуют силы F, направление которых определяют по правилу левой руки. Под действием этих сил
- 13. Момент сил, действующих на рамку со стороны магнитного поля при пропускании через нее измеряемого тока, не
- 14. При повороте рамки под действием магнитного поля на нее действует в обратную сторону момент сил упругости
- 15. Угол отклонения рамки прямо пропорционален силе тока I, а следовательно, шкала измерительного прибора магнитоэлектрической системы является
- 16. Достоинства:
- 18. Приборы электромагнитной системы
- 20. Принцип действия. Передвижение подвижной части измерительного механизма происходит в результате взаимодействия магнитных полей неподвижной катушки и
- 21. В приборах с круглой катушкой вращающий момент создается при взаимодействии подвижной и неподвижной пластин. При протекании
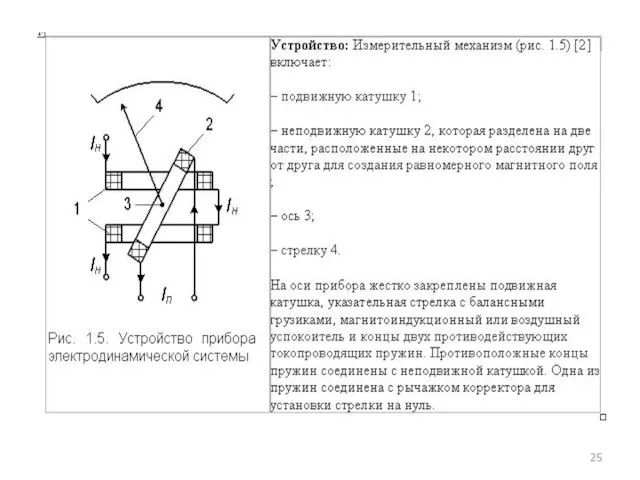
- 26. Принцип действия. Перемещение подвижной части прибора происходит в результате взаимодействия магнитных полей подвижной и неподвижной катушек,
- 28. Приборы электростатической системы
- 34. С = 100 мкА/50 = 2мкА/дел.
- 38. Чувствительность прибора Величина, численно равная приращению угла поворота подвижной части прибора к приращению измеряемой величины dx
- 39. Цена деления прибора Величина К=1/с, обратная чувствительности, называется ценой деления прибора.
- 40. Подсчет абсолютной погрешности показаний прибора
- 56. Скачать презентацию
Для любого измерения, необходимо оперировать какими-то эталонными величинами.Российский физик Б.С.Якоби предлагает
Для любого измерения, необходимо оперировать какими-то эталонными величинами.Российский физик Б.С.Якоби предлагает
В развитии электроизмерительной техники конца второй половины XIX и начала XX
В развитии электроизмерительной техники конца второй половины XIX и начала XX
Классификация приборов
Приборы магнитоэлектрической системы
Приборы электромагнитной системы
Приборы электродинамической системы
Классификация приборов
Приборы магнитоэлектрической системы
Приборы электромагнитной системы
Приборы электродинамической системы

Условные обозначения систем приборов
Условные обозначения систем приборов
Приборы магнитоэлектрической системы
Приборы магнитоэлектрической системы
Берут лёгкую алюминиевую рамку 2 прямоугольной формы, наматывают на неё катушку
Берут лёгкую алюминиевую рамку 2 прямоугольной формы, наматывают на неё катушку
Увеличивая силу тока в рамке в 2 раза можно заметить, что
Увеличивая силу тока в рамке в 2 раза можно заметить, что
Принцип действия.
Подвижная часть перемещается в результате взаимодействия поля постоянного магнита с
Принцип действия.
Подвижная часть перемещается в результате взаимодействия поля постоянного магнита с
На рамку действуют силы F, направление которых определяют по правилу левой
На рамку действуют силы F, направление которых определяют по правилу левой
Момент сил, действующих на рамку со стороны магнитного поля при пропускании
Момент сил, действующих на рамку со стороны магнитного поля при пропускании
При повороте рамки под действием магнитного поля на нее действует в
При повороте рамки под действием магнитного поля на нее действует в
Угол отклонения рамки прямо пропорционален силе тока I, а следовательно, шкала
Угол отклонения рамки прямо пропорционален силе тока I, а следовательно, шкала
Достоинства:
Достоинства:

Приборы электромагнитной системы
Приборы электромагнитной системы

Принцип действия.
Передвижение подвижной части измерительного механизма происходит в результате взаимодействия магнитных
Принцип действия.
Передвижение подвижной части измерительного механизма происходит в результате взаимодействия магнитных
В приборах с круглой катушкой вращающий момент создается при взаимодействии подвижной
В приборах с круглой катушкой вращающий момент создается при взаимодействии подвижной

Принцип действия.
Перемещение подвижной части прибора происходит в результате взаимодействия магнитных полей
Принцип действия.
Перемещение подвижной части прибора происходит в результате взаимодействия магнитных полей

Приборы электростатической системы
Приборы электростатической системы

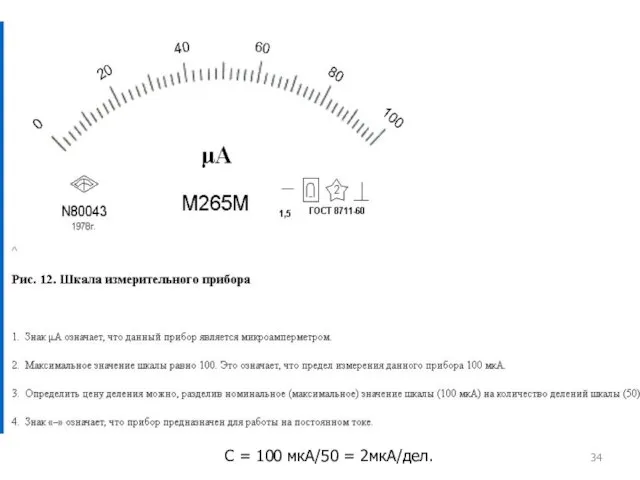
С = 100 мкА/50 = 2мкА/дел.
С = 100 мкА/50 = 2мкА/дел.
Чувствительность прибора
Величина, численно равная приращению угла поворота подвижной части прибора к
Чувствительность прибора
Величина, численно равная приращению угла поворота подвижной части прибора к
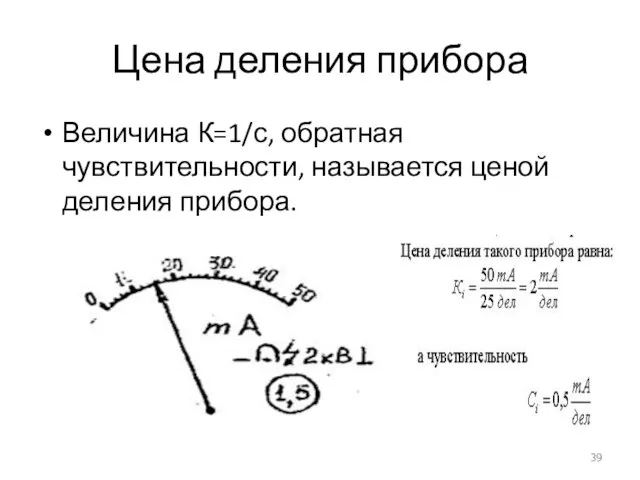
Цена деления прибора
Величина К=1/с, обратная чувствительности, называется ценой деления прибора.
Цена деления прибора
Величина К=1/с, обратная чувствительности, называется ценой деления прибора.
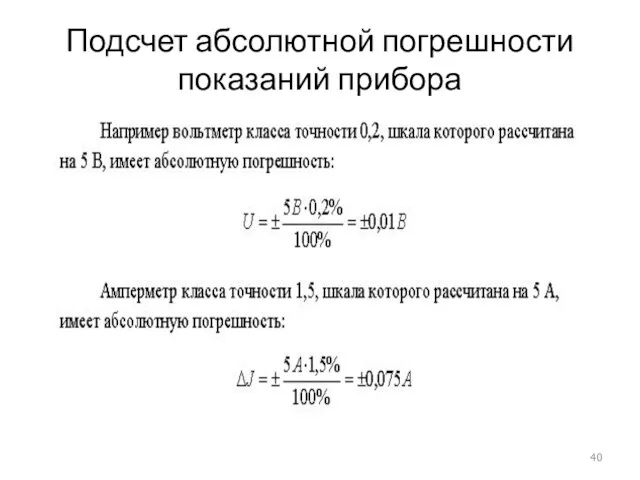
Подсчет абсолютной погрешности показаний прибора
Подсчет абсолютной погрешности показаний прибора







 БФ Допомога армії України
БФ Допомога армії України Нано-дом
Нано-дом Жилой комплекс Парковый
Жилой комплекс Парковый Case Study Trimo
Case Study Trimo Неомаш
Неомаш Основные технические характеристики контейнеров
Основные технические характеристики контейнеров Видеокарта
Видеокарта Мягкий согласный [ч']. Буквы Чч. Часть 2
Мягкий согласный [ч']. Буквы Чч. Часть 2 Первый Мясокомбинат
Первый Мясокомбинат Гараж на 300-500 автомобилей со станцией технического обслуживания
Гараж на 300-500 автомобилей со станцией технического обслуживания Педагогика
Педагогика Лингвистическая игра
Лингвистическая игра 20150929_urok_1_dom_bez_sten_8_kl
20150929_urok_1_dom_bez_sten_8_kl Обязанности поездного диспетчера. РПД
Обязанности поездного диспетчера. РПД Using systemvue’s open FPGA design flow, M8190A Sig Gen, M9703A High Speed Digitizer
Using systemvue’s open FPGA design flow, M8190A Sig Gen, M9703A High Speed Digitizer Виды и методы диагностирования
Виды и методы диагностирования Перепродажа товаров
Перепродажа товаров Деревянный стул-стремянка
Деревянный стул-стремянка 2_5208896367623150234
2_5208896367623150234 Объемно-пространственная структура объектов ландшафтной архитектуры
Объемно-пространственная структура объектов ландшафтной архитектуры DABAXAJIN NJu
DABAXAJIN NJu Воздушное пространство класса G над территорией Крыма
Воздушное пространство класса G над территорией Крыма Психологические особенности детских рисунков. Теория и технология руководства изобразительной деятельностью детей
Психологические особенности детских рисунков. Теория и технология руководства изобразительной деятельностью детей Заповеди Божьи
Заповеди Божьи 20160507_ssha
20160507_ssha Шаблон презентации итоговой работы
Шаблон презентации итоговой работы ВИКТОРИНА
ВИКТОРИНА Какими мы были. 11-Б
Какими мы были. 11-Б