- Кентервильское привидение или учим робота различать цвета

Содержание
- 2. Движение вперед Движение вперед базовой тележки задается подачей на левый и правый мотор одинаковой скорости. В
- 3. Движение вперед
- 4. Движение назад Движение назад выполняется аналогично. Используем блок «Моторы назад».
- 5. Движение назад
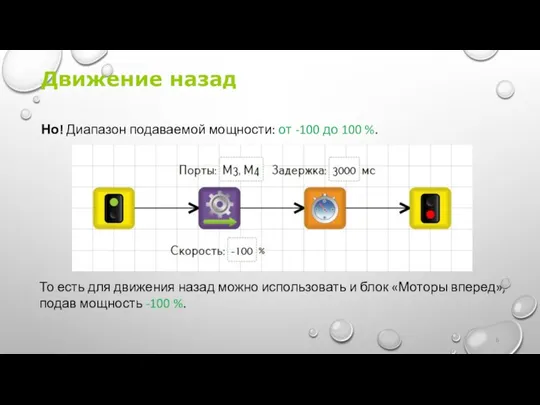
- 6. Движение назад Но! Диапазон подаваемой мощности: от -100 до 100 %. То есть для движения назад
- 7. Повороты Повороты можно разделить на 3 типа: резкий поворот мощность подается только на одно колесо плавный
- 8. Использование значений датчика осуществляется в TRIK Studio через сенсорные переменные. При подключении датчика: к порту A1
- 9. Цикл Цикл — управляющая конструкция в языках программирования для организации многократного выполнения набора инструкций. Пример в
- 10. Задача Кентервильское приведение Кентервильский робот: привидение рисует каждую ночь лужи красной краской. Убедившись, что лужа красная,
- 11. Пояснение. Выводить на экран: Веселый смайлик, если робот видит красную лужу (больше 72) или пустой пол
- 12. Решение задачи. Кентервильское приведение
- 13. Решение задачи. Кентервильское приведение №2
- 15. Скачать презентацию
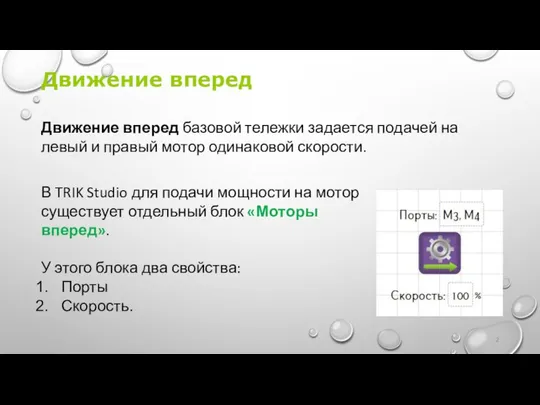
Движение вперед
Движение вперед базовой тележки задается подачей на левый и правый
Движение вперед
Движение вперед базовой тележки задается подачей на левый и правый

Движение вперед
Движение вперед
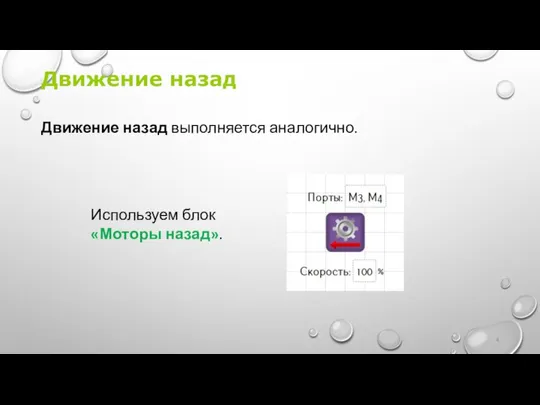
Движение назад
Движение назад выполняется аналогично.
Используем блок «Моторы назад».
Движение назад
Движение назад выполняется аналогично.
Используем блок «Моторы назад».

Движение назад
Движение назад
Движение назад
Но! Диапазон подаваемой мощности: от -100 до 100 %.
То есть
Движение назад
Но! Диапазон подаваемой мощности: от -100 до 100 %.
То есть
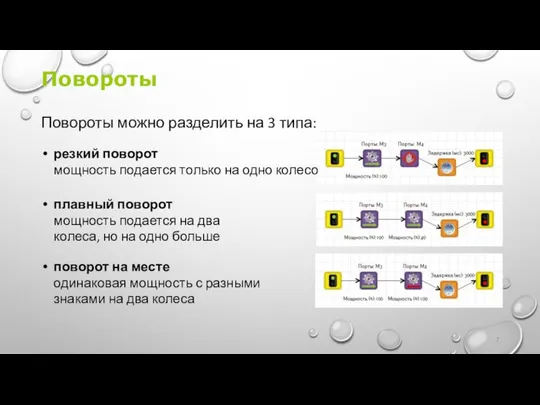
Повороты
Повороты можно разделить на 3 типа:
резкий поворот
мощность подается только на
Повороты
Повороты можно разделить на 3 типа:
резкий поворот мощность подается только на
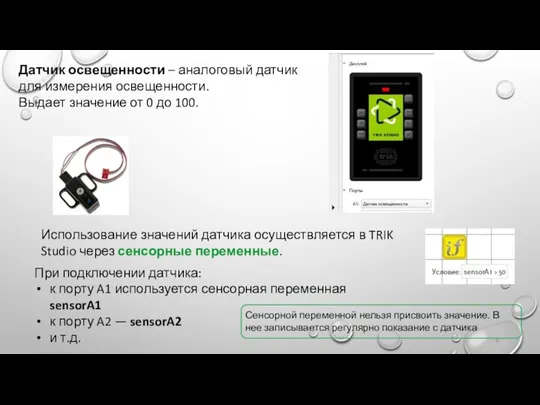
Использование значений датчика осуществляется в TRIK Studio через сенсорные переменные.
При подключении
Использование значений датчика осуществляется в TRIK Studio через сенсорные переменные.
При подключении

Цикл
Цикл — управляющая конструкция в языках программирования для организации многократного выполнения
Цикл
Цикл — управляющая конструкция в языках программирования для организации многократного выполнения
Задача Кентервильское приведение
Кентервильский робот: привидение рисует каждую ночь лужи красной краской.
Задача Кентервильское приведение
Кентервильский робот: привидение рисует каждую ночь лужи красной краской.
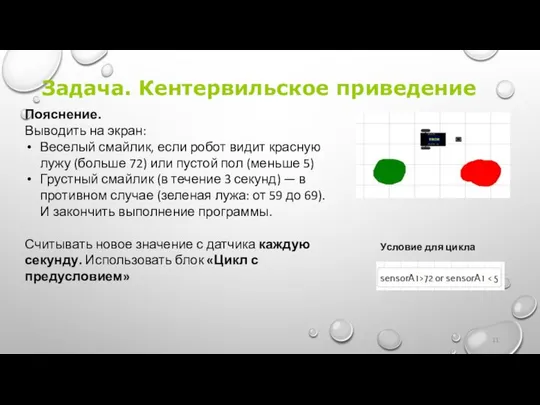
Пояснение.
Выводить на экран:
Веселый смайлик, если робот видит красную лужу
Пояснение.
Выводить на экран:
Веселый смайлик, если робот видит красную лужу

Решение задачи. Кентервильское приведение
Решение задачи. Кентервильское приведение
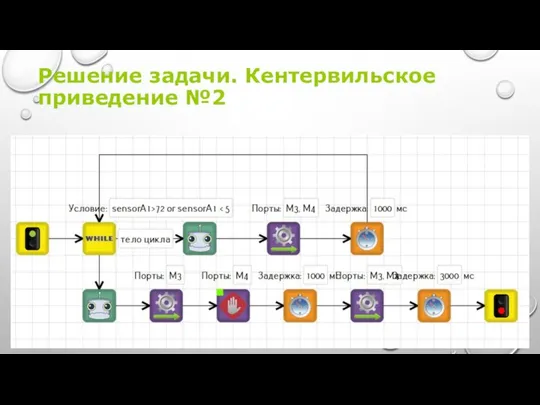
Решение задачи. Кентервильское приведение №2
Решение задачи. Кентервильское приведение №2
 20121009_profilnoe
20121009_profilnoe Гидроэнергетические сооружения
Гидроэнергетические сооружения Актуальный объект под ипотеку
Актуальный объект под ипотеку Здравствуйте, уважаемые родители!
Здравствуйте, уважаемые родители! Praktika_Khamitsevich_Maria (2)
Praktika_Khamitsevich_Maria (2) Технические средства автоматизации и управления
Технические средства автоматизации и управления поляни
поляни Обучение дилеров
Обучение дилеров Что такое доброта?
Что такое доброта? 130 лет начала Евангельского движения на Псковщине
130 лет начала Евангельского движения на Псковщине Развитие сотовых мобильных телефонов
Развитие сотовых мобильных телефонов Игрушка с подвижными деталями
Игрушка с подвижными деталями С 8 марта
С 8 марта Население и хозяйство субтропиков России
Население и хозяйство субтропиков России Животные на пьедесталах с ответами
Животные на пьедесталах с ответами 20161107_prezentatsiya_po_levitanu
20161107_prezentatsiya_po_levitanu Геморрагические диатезы у детей
Геморрагические диатезы у детей Частотный диапозон и применимости технологии Bluetooth в странах
Частотный диапозон и применимости технологии Bluetooth в странах Особенности технологической схемы энергоблока с ВВЭР-1000
Особенности технологической схемы энергоблока с ВВЭР-1000 Мобильная фотография
Мобильная фотография Личное портфолио
Личное портфолио Совершенствование конструкции и изготовления компрессоров в НПО Искра
Совершенствование конструкции и изготовления компрессоров в НПО Искра Фирменный стиль. Компания Sony. Шаблон
Фирменный стиль. Компания Sony. Шаблон Тематическая неделя Встречаем птиц
Тематическая неделя Встречаем птиц Машиностроение Зарубежной Европы
Машиностроение Зарубежной Европы Моисей и Исход. Исход Израиля из Египта и вхождение в Ханаан
Моисей и Исход. Исход Израиля из Египта и вхождение в Ханаан Headphones
Headphones Конструкция самолёта-моноплана с крылом, расположенным над фюзеляжем и крепящимся к последнему при помощи подкосов
Конструкция самолёта-моноплана с крылом, расположенным над фюзеляжем и крепящимся к последнему при помощи подкосов