- Классификация автоматических систем и роботов

Содержание
- 2. Классификация САУ по объёму априорной и рабочей информации. Классификация САУ по виду оператора D (x). Классификация
- 3. Классификационные признаки важнейшие для САУ. 1 Объём априорной информации о среде в которой будет функционировать САУ.
- 4. По объёму априорной информации САУ делят на: А. Обыкновенные САУ – не могут учитывать изменений среды
- 5. Обыкновенные системы по объёму рабочей информации делятся на: А-I. Разомкнутые САУ, в которых для управления используется
- 6. Их можно разделить на: А-I-1 Системы программного управления – используется лишь X(t).
- 7. А-I-2 Системы c компенсацией возмущений. .
- 8. Разомкнутые САУ не совершенны, т.к. возмущений много, их сложно измерить. Подавляющее большинство систем замкнутые и реализуют
- 9. А-II. Обыкновенные замкнутые САУ В законе управления используется информация не только о задаче управления X(t), но
- 10. Структурная схема обыкновенной замкнутой САУ .
- 11. Принцип обратной связи исключительно универсален, т.к. где бы ни подействовали возмущения W(t) и V(t), он всегда
- 12. По виду сигнала X(t) системы А-II можно разделить на: А-II-1 Системы автоматического регулирования (САР) иначе говоря,
- 13. А-II-2 Системы программного управления (СПУ), когда X(t)=var, V(t)≠0, W(t)≠0, но закон изменения X(t) заранее известен. Цель
- 14. А-II-3 Следящие системы (СС) - X(t)=var по заранее не известному закону. При V(t)≠0, W(t)≠0 необходимо E(t)=X(t)-Y(t)
- 15. Б Самонастраивающиеся САУ Это системы, которые должны сами изменять свои свойства (самонастраиваться), т.к. заранее не известно
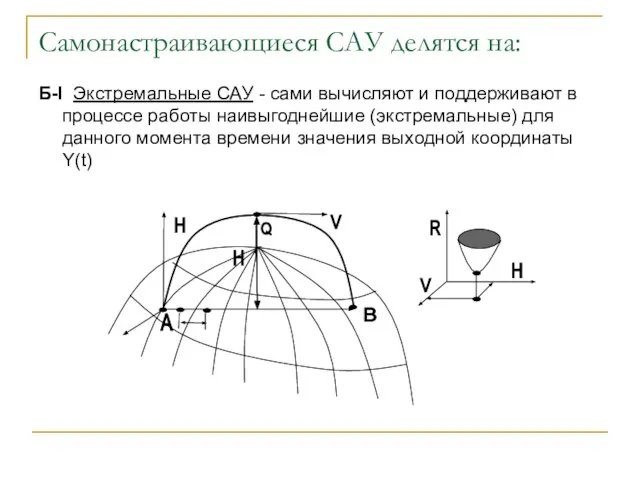
- 16. Самонастраивающиеся САУ делятся на: Б-I Экстремальные САУ - сами вычисляют и поддерживают в процессе работы наивыгоднейшие
- 17. В ходе движения ракеты изменяются вес Q, высота H, скорость V, так, что расход топлива R
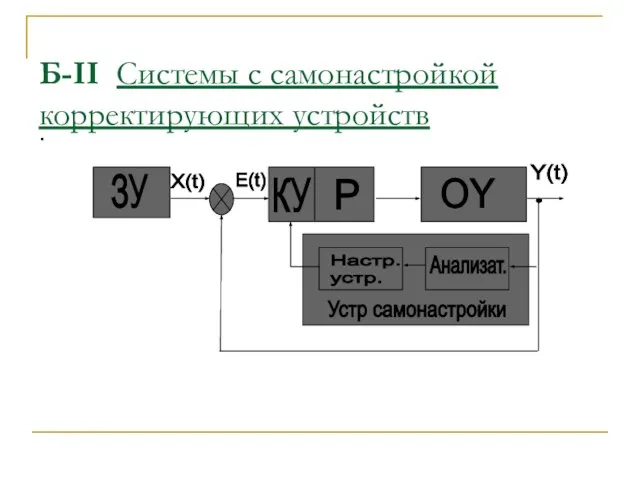
- 18. Б-II Системы с самонастройкой корректирующих устройств .
- 19. Системы с самонастройкой корректирующих устройств (КУ) – сами анализируют качественные показатели переходных процессов в САУ, т.е.
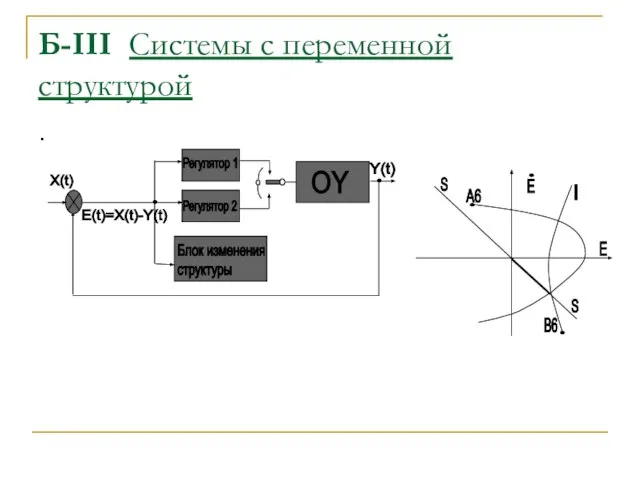
- 20. Б-III Системы с переменной структурой .
- 21. Системы с переменной структурой – это САУ в которых конкурируют между собой две структуры, так что
- 22. В. Игровые САУ Создаются в условиях, когда систему можно представить в виде игры двух сторон. Об
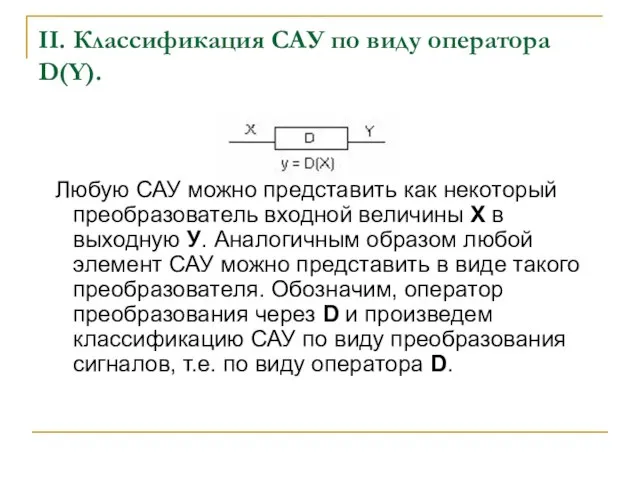
- 23. II. Классификация САУ по виду оператора D(Y). Любую САУ можно представить как некоторый преобразователь входной величины
- 24. По виду оператора D САУ делятся на: 1. Линейные САУ - это системы, в которых выполняется
- 25. 2. Нелинейные САУ – это системы, в которых принцип суперпозиции не выполняется, т.е.: D ( C1X1+C2X2+…CnXn
- 26. 3. Стационарные САУ – системы, реакция которых на некоторое входное воздействие не зависит от времени появления
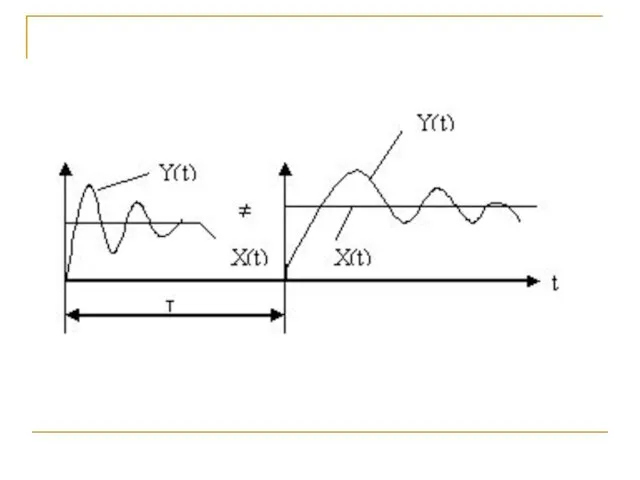
- 27. 4. Нестационарные САУ – системы, реакция которых на некоторое входное воздействие зависит от времени его появления,
- 29. 5. Детерминированные САУ – системы, в которых на некоторый входной сигнал возможна лишь одна вполне определенная
- 30. 7. Непрерывные САУ – системы, сигналы в которых представляют собой непрерывные функции времени. 8. Дискретные САУ
- 31. Различают: 8-а. Квантование по уровню – непрерывная функция заменяется дискретной (разрывной), принимающей определённые квантованные уровни. Если
- 32. .
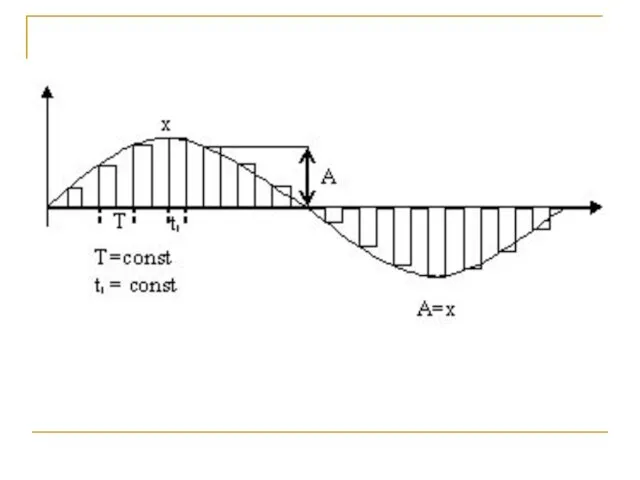
- 33. 8-б. Квантование во времени (импульсные САУ) свою очередь делят на: 8-б-1.Системы с амплитудно-импульсной модуляцией (АИМ). Непрерывный
- 35. 8-б-2.Системы с широтно-импульсной модуляцией (ШИМ). Здесь: A=const T=const tn=x (t)
- 36. 8-б-3. Системы с времяимпульсной модуляцией (ВИМ). Эти системы имеют место в радиолокации, гидролокации, светолокации и тд.
- 37. 8-в. Квантование по времени и по уровню (цифровые САУ). Непрерывный сигнал заменяется последовательностью равноотстоящих импульсов, амплитуда
- 38. 9. По характеру сигнала X(t) САУ делятся на: 9-а. Системы автоматического регулирования (САР) или системы автоматической
- 39. 9-б. Системы программного управления. Здесь Y3 (+)-Var, но по заранее известному закону. Пример: станки с ЧПУ.
- 40. 9-в. Следящие системы В этих ситемах X(t)=Var изменяется, но по заранее неизвестному закону. Пример: ПВО (ПВО
- 41. По принципу действия автоматические системы делятся на: 10. Статистические САУ – системы, которые имеют принципиальную ошибку
- 42. Ш.Классификация роботов. Класс А Манипуляционные (для выполнения функций рук человека) А-1. Автоматические (действующие без участия человека).
- 43. А-2. Биотехнические (с непрерывным во времени участием человека) А-2-1. Командные (управляемые с пульта по отдельным степеням
- 44. А-3. Интерактивные (с частичным участием человека) А-3-1. Автоматизированные (чередование во времени автоматических и биотехнических режимов.) А-3-2.
- 45. Класс Б - Мобильные (локомоционные, транспортные – для выполнения функций ног) Б-1. Шагающие (с движителями подобными
- 46. Б-2. Самодвижущиеся (с любыми движителями – колеса, реактивные двигатели и т.д.) Б-2-1. Программные Б-2-2. Адаптивные Б-2-3.Интеллектуальные
- 47. Б-3.Экзоскелетоны (внешние скелеты – для усиления конечностей человека) Б-3-1. Открытые – без герметизации Б-3-2. Скафандровые –
- 48. Класс В Информационные (для добывания информации из экстремальных сред) В-1. Исследователи (для изучения свойств сред или
- 49. В-2. Искатели – определители (для поиска предметов и определения их свойств) «Лортодромия» В-2-1. Контактные (нужен контакт)
- 50. Класс Г Творческо – игровые (для решения интеллектуальных задач) Г-1. Проектировщики (САПР, АРМ, …). Г-1-1. Программные
- 51. Г-2. Игровые (решение задач из «Теории игр») Г-2-1. Позиционные игры (шахматы) Г-2-2. Динамические игры (ПВО….) Г-2-3.
- 52. Г-3. Композиционные Г-3-1. Автоматический переводчик Г-3-2. Референт, библиограф, кассир Г-3-3. Композитор, поэт. *
- 53. * Гефест – бог кузнечного ремесла. «…. и к мехам обратился Их на огонь он направил
- 55. Скачать презентацию
Классификация САУ по объёму априорной и рабочей информации.
Классификация САУ по виду
Классификация САУ по объёму априорной и рабочей информации.
Классификация САУ по виду
Классификационные признаки важнейшие для САУ.
1 Объём априорной информации о среде в
Классификационные признаки важнейшие для САУ.
1 Объём априорной информации о среде в
По объёму априорной информации САУ делят на:
А. Обыкновенные САУ – не
По объёму априорной информации САУ делят на:
А. Обыкновенные САУ – не
Обыкновенные системы по объёму рабочей информации делятся на:
А-I. Разомкнутые САУ, в
Обыкновенные системы по объёму рабочей информации делятся на:
А-I. Разомкнутые САУ, в
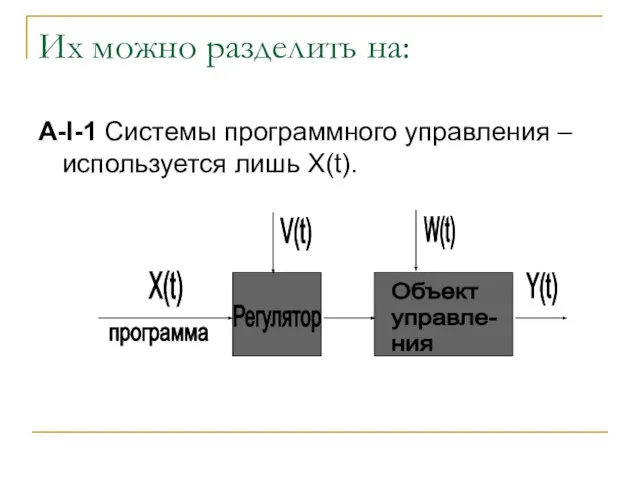
Их можно разделить на:
А-I-1 Системы программного управления – используется лишь X(t).
Их можно разделить на:
А-I-1 Системы программного управления – используется лишь X(t).
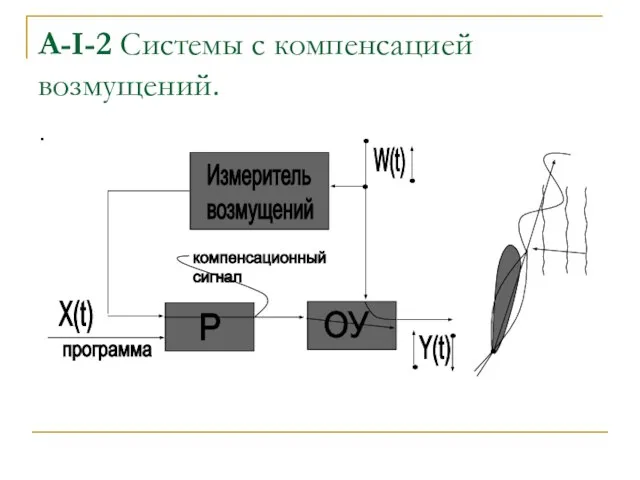
А-I-2 Системы c компенсацией возмущений.
.
А-I-2 Системы c компенсацией возмущений.
.
Разомкнутые САУ не совершенны, т.к. возмущений много, их сложно измерить.
Подавляющее большинство
Разомкнутые САУ не совершенны, т.к. возмущений много, их сложно измерить.
Подавляющее большинство
А-II. Обыкновенные замкнутые САУ
В законе управления используется информация не только о
А-II. Обыкновенные замкнутые САУ
В законе управления используется информация не только о

Структурная схема обыкновенной замкнутой САУ
.
Структурная схема обыкновенной замкнутой САУ
.
Принцип обратной связи исключительно универсален, т.к. где бы ни подействовали возмущения
Принцип обратной связи исключительно универсален, т.к. где бы ни подействовали возмущения
По виду сигнала X(t) системы А-II можно разделить на:
А-II-1 Системы автоматического
По виду сигнала X(t) системы А-II можно разделить на:
А-II-1 Системы автоматического
А-II-2 Системы программного управления (СПУ), когда X(t)=var, V(t)≠0, W(t)≠0, но закон
А-II-2 Системы программного управления (СПУ), когда X(t)=var, V(t)≠0, W(t)≠0, но закон
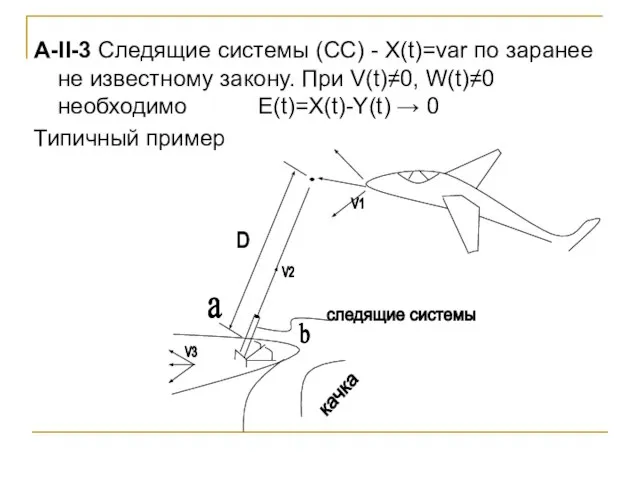
А-II-3 Следящие системы (СС) - X(t)=var по заранее не известному закону.
А-II-3 Следящие системы (СС) - X(t)=var по заранее не известному закону.
Б Самонастраивающиеся САУ
Это системы, которые должны сами изменять свои свойства
Б Самонастраивающиеся САУ
Это системы, которые должны сами изменять свои свойства
Самонастраивающиеся САУ делятся на:
Б-I Экстремальные САУ - сами вычисляют и поддерживают
Самонастраивающиеся САУ делятся на:
Б-I Экстремальные САУ - сами вычисляют и поддерживают
В ходе движения ракеты изменяются вес Q, высота H, скорость V,
В ходе движения ракеты изменяются вес Q, высота H, скорость V,
Б-II Системы с самонастройкой корректирующих устройств
.
Б-II Системы с самонастройкой корректирующих устройств
.
Системы с самонастройкой корректирующих устройств (КУ) – сами анализируют качественные показатели
Системы с самонастройкой корректирующих устройств (КУ) – сами анализируют качественные показатели
Б-III Системы с переменной структурой
.
Б-III Системы с переменной структурой
.
Системы с переменной структурой – это САУ в которых конкурируют между
Системы с переменной структурой – это САУ в которых конкурируют между
В. Игровые САУ
Создаются в условиях, когда систему можно представить в виде
В. Игровые САУ
Создаются в условиях, когда систему можно представить в виде
II. Классификация САУ по виду оператора D(Y).
Любую САУ можно представить
II. Классификация САУ по виду оператора D(Y).
Любую САУ можно представить
По виду оператора D САУ делятся на:
1. Линейные САУ - это
По виду оператора D САУ делятся на:
1. Линейные САУ - это
2. Нелинейные САУ – это системы, в которых принцип суперпозиции не
2. Нелинейные САУ – это системы, в которых принцип суперпозиции не
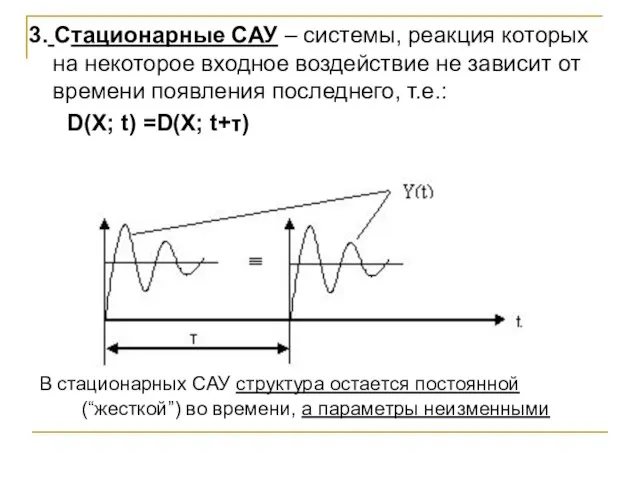
3. Стационарные САУ – системы, реакция которых на некоторое входное воздействие
3. Стационарные САУ – системы, реакция которых на некоторое входное воздействие
4. Нестационарные САУ – системы, реакция которых на некоторое входное воздействие
4. Нестационарные САУ – системы, реакция которых на некоторое входное воздействие
5. Детерминированные САУ – системы, в которых на некоторый входной сигнал
5. Детерминированные САУ – системы, в которых на некоторый входной сигнал
7. Непрерывные САУ – системы, сигналы в которых представляют собой непрерывные
7. Непрерывные САУ – системы, сигналы в которых представляют собой непрерывные
Различают:
8-а. Квантование по уровню – непрерывная функция заменяется дискретной (разрывной), принимающей
Различают:
8-а. Квантование по уровню – непрерывная функция заменяется дискретной (разрывной), принимающей
.
.
8-б. Квантование во времени (импульсные САУ) свою очередь делят на:
8-б-1.Системы с
8-б. Квантование во времени (импульсные САУ) свою очередь делят на:
8-б-1.Системы с
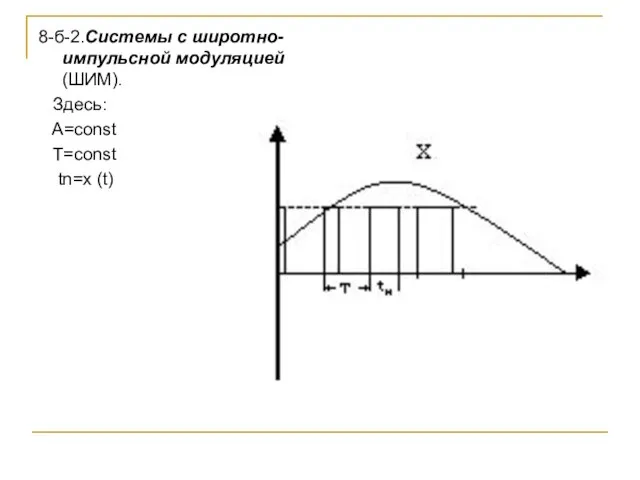
8-б-2.Системы с широтно-импульсной модуляцией (ШИМ).
Здесь:
A=const
T=const
tn=x (t)
8-б-2.Системы с широтно-импульсной модуляцией (ШИМ).
Здесь:
A=const
T=const
tn=x (t)
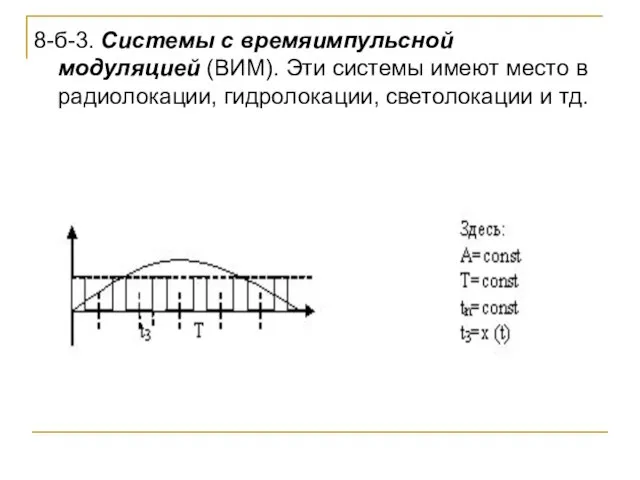
8-б-3. Системы с времяимпульсной модуляцией (ВИМ). Эти системы имеют место в
8-б-3. Системы с времяимпульсной модуляцией (ВИМ). Эти системы имеют место в
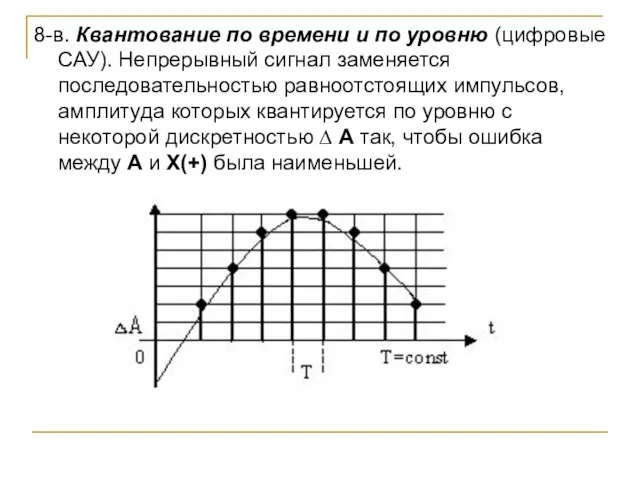
8-в. Квантование по времени и по уровню (цифровые САУ). Непрерывный сигнал
8-в. Квантование по времени и по уровню (цифровые САУ). Непрерывный сигнал
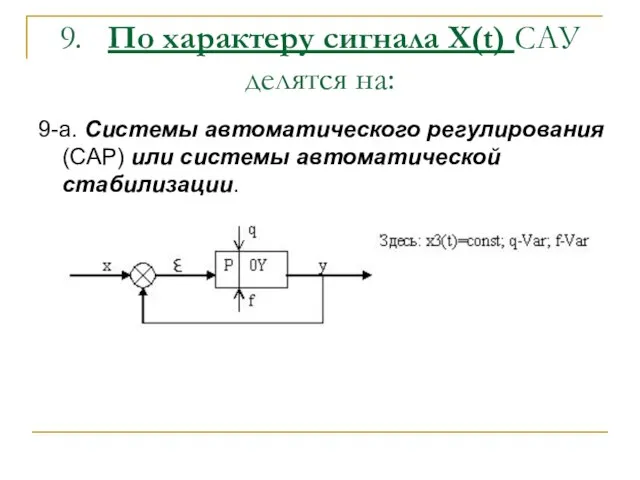
9. По характеру сигнала X(t) САУ делятся на:
9-а. Системы автоматического регулирования
9. По характеру сигнала X(t) САУ делятся на:
9-а. Системы автоматического регулирования
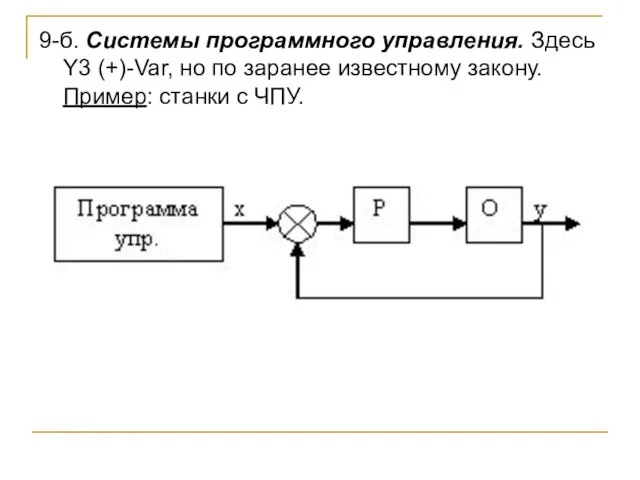
9-б. Системы программного управления. Здесь Y3 (+)-Var, но по заранее известному
9-б. Системы программного управления. Здесь Y3 (+)-Var, но по заранее известному
9-в. Следящие системы
В этих ситемах X(t)=Var изменяется, но по заранее неизвестному
9-в. Следящие системы
В этих ситемах X(t)=Var изменяется, но по заранее неизвестному
По принципу действия автоматические системы делятся на:
10. Статистические САУ – системы,
По принципу действия автоматические системы делятся на:
10. Статистические САУ – системы,
Ш.Классификация роботов.
Класс А
Манипуляционные (для выполнения функций рук человека)
А-1. Автоматические (действующие без
Ш.Классификация роботов.
Класс А
Манипуляционные (для выполнения функций рук человека)
А-1. Автоматические (действующие без
А-2. Биотехнические (с непрерывным во времени участием человека)
А-2-1. Командные (управляемые с
А-2. Биотехнические (с непрерывным во времени участием человека)
А-2-1. Командные (управляемые с
А-3. Интерактивные (с частичным участием человека)
А-3-1. Автоматизированные (чередование во времени
А-3. Интерактивные (с частичным участием человека)
А-3-1. Автоматизированные (чередование во времени
Класс Б - Мобильные (локомоционные, транспортные – для выполнения функций ног)
Класс Б - Мобильные (локомоционные, транспортные – для выполнения функций ног)
Б-2. Самодвижущиеся (с любыми движителями – колеса, реактивные двигатели и т.д.)
Б-2-1.
Б-2. Самодвижущиеся (с любыми движителями – колеса, реактивные двигатели и т.д.)
Б-2-1.
Б-3.Экзоскелетоны (внешние скелеты – для усиления конечностей человека)
Б-3-1. Открытые –
Б-3.Экзоскелетоны (внешние скелеты – для усиления конечностей человека)
Б-3-1. Открытые –
Класс В
Информационные (для добывания информации из экстремальных сред)
В-1. Исследователи
Класс В
Информационные (для добывания информации из экстремальных сред)
В-1. Исследователи
В-2. Искатели – определители (для поиска предметов и определения их свойств)
В-2. Искатели – определители (для поиска предметов и определения их свойств)
Класс Г
Творческо – игровые (для решения интеллектуальных задач)
Г-1. Проектировщики (САПР,
Класс Г
Творческо – игровые (для решения интеллектуальных задач)
Г-1. Проектировщики (САПР,
Г-2. Игровые (решение задач из «Теории игр»)
Г-2-1. Позиционные игры (шахматы)
Г-2-2. Динамические
Г-2. Игровые (решение задач из «Теории игр»)
Г-2-1. Позиционные игры (шахматы)
Г-2-2. Динамические
Г-3. Композиционные
Г-3-1. Автоматический переводчик
Г-3-2. Референт, библиограф, кассир
Г-3-3. Композитор, поэт. *
Г-3. Композиционные
Г-3-1. Автоматический переводчик
Г-3-2. Референт, библиограф, кассир
Г-3-3. Композитор, поэт. *
*
Гефест – бог кузнечного ремесла.
«…. и к мехам обратился
Их на
*
Гефест – бог кузнечного ремесла.
«…. и к мехам обратился
Их на
 Разработка информационной системы автозаправочной станции
Разработка информационной системы автозаправочной станции Содержание и процедура проведения диагностического обследования детей раннего и младшего дошкольного возраста
Содержание и процедура проведения диагностического обследования детей раннего и младшего дошкольного возраста Список литературы
Список литературы Значение эмоций для формирования положительного взаимодействия ребёнка с окружающим миром
Значение эмоций для формирования положительного взаимодействия ребёнка с окружающим миром Устойчивость систем автоматического управления
Устойчивость систем автоматического управления Православие. Православная Церковь
Православие. Православная Церковь Доска почета. Контролеры показавшие хороший результат в работе по инвентаризации потребителей
Доска почета. Контролеры показавшие хороший результат в работе по инвентаризации потребителей математика 16 апреля
математика 16 апреля Производство, эк.функции гос-ва
Производство, эк.функции гос-ва Времена года
Времена года Количество форма, величина
Количество форма, величина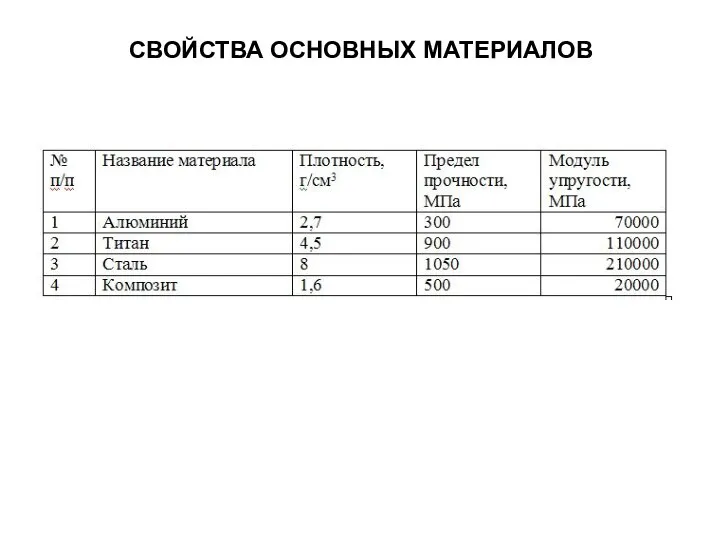 Свойства основных материалов
Свойства основных материалов Проект некапитальных торговых объектов для размещения на территории ТЦ Заречье
Проект некапитальных торговых объектов для размещения на территории ТЦ Заречье выпускной
выпускной Сонина дорога к искусству
Сонина дорога к искусству План застройки ЗИЛ Восток
План застройки ЗИЛ Восток Семисегментный светодиодный индикатор
Семисегментный светодиодный индикатор Сыйлыйбыз 6-7 яшь
Сыйлыйбыз 6-7 яшь Зустріч з Володимиром Олександровичем П`янковим
Зустріч з Володимиром Олександровичем П`янковим Организация и проведение эвакуационных мероприятий
Организация и проведение эвакуационных мероприятий Решение текстовых задач путем моделирования
Решение текстовых задач путем моделирования Электропривод
Электропривод Елена Попова. Загадки про животных и птиц
Елена Попова. Загадки про животных и птиц Материалы для дистанционной поддержки учащихся по дополнительной программе Силуэт
Материалы для дистанционной поддержки учащихся по дополнительной программе Силуэт Презентація_Обстеження_обєктів_Михайло_Жужа_Віктор_Носенко_09_06
Презентація_Обстеження_обєктів_Михайло_Жужа_Віктор_Носенко_09_06 Моя будующая профессия - электроэнергетик
Моя будующая профессия - электроэнергетик Эксплуатация технологического оборудования
Эксплуатация технологического оборудования Дизайн для недизайнеров
Дизайн для недизайнеров