- Математический аппарат анализа и синтеза цифровых САУ

Содержание
- 2. Для удобства исследования дискретных систем часто вводят для рассмотрения новую переменную – так называемое относительное время:
- 3. Понятие о решетчатой функции и её разности К определению первой разности решетчатой функции 1 1 1
- 4. Разностные уравнения. Связь между разностными уравнениями и дискретными передаточными функциями Для исследования дискретных САР используются так
- 5. По таким правилам уравнение (11) преобразуется к виду откуда легко определяется дискретная передаточная функция (ДПФ) импульсной
- 6. Условие устойчивости дискретной системы может быть сформулировано так: дискретная САР будет устойчивой, если корни её характеристического
- 7. Записываем последнее разностное уравнение в операторной форме и получаем ДПФ Составляем характеристическое уравнение полученной дискретной системы
- 8. sa=tf(1,[5 3 2]) step(sa), grid on, hold on for T=[0.25 1] sd=tf(T^2,[5 -10+3*T 5-3*T+2*T^2],T) step(sd) end
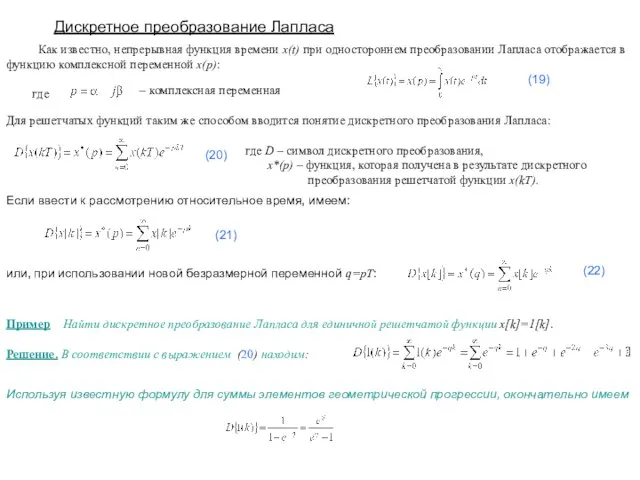
- 9. Дискретное преобразование Лапласа Как известно, непрерывная функция времени x(t) при одностороннем преобразовании Лапласа отображается в функцию
- 10. Основные свойства дискретного преобразования Лапласа: Дискретное преобразование Лапласа 1) поскольку дискретное преобразование Лапласа определяет связь между
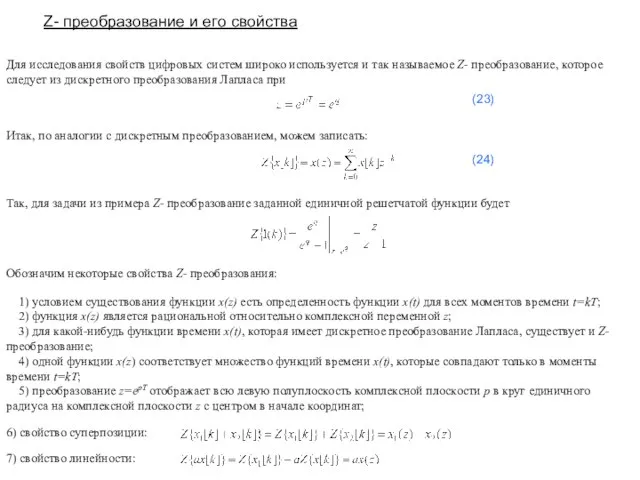
- 11. Z- преобразование и его свойства Для исследования свойств цифровых систем широко используется и так называемое Z-
- 12. 8) свойство сдвига во времени (запаздывание и опережение): Z- преобразование и его свойства 9) свертке оригиналов
- 13. При вычислении Z- преобразования функций удобно исходить не с функции времени x(t), а из его преобразования
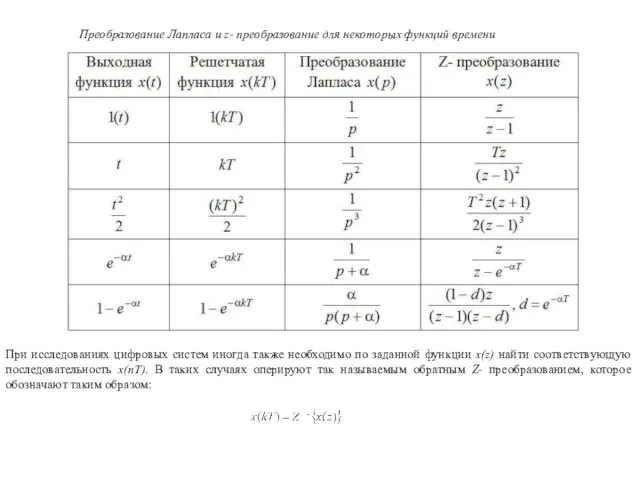
- 14. Преобразование Лапласа и z- преобразование для некоторых функций времени При исследованиях цифровых систем иногда также необходимо
- 15. Как вычислять z-преобразование Matlab syms k x = 1 + 2^(k+1); X = ztrans ( x
- 16. Обратное z-преобразование (численно) Matlab n = [3 -4 0]; d = [1 -3 2]; T =
- 18. Скачать презентацию
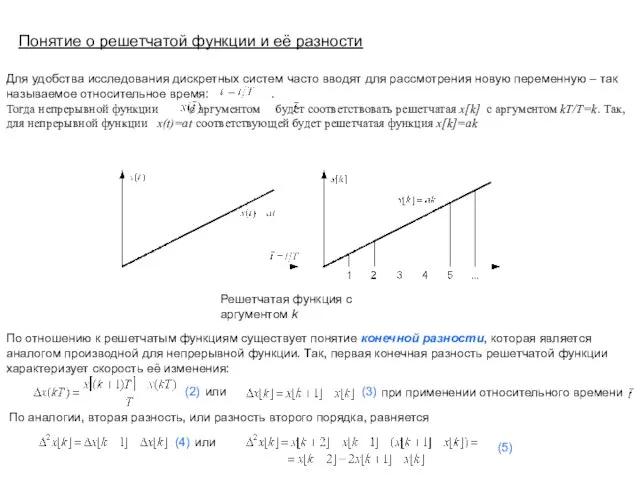
Для удобства исследования дискретных систем часто вводят для рассмотрения новую переменную
Для удобства исследования дискретных систем часто вводят для рассмотрения новую переменную
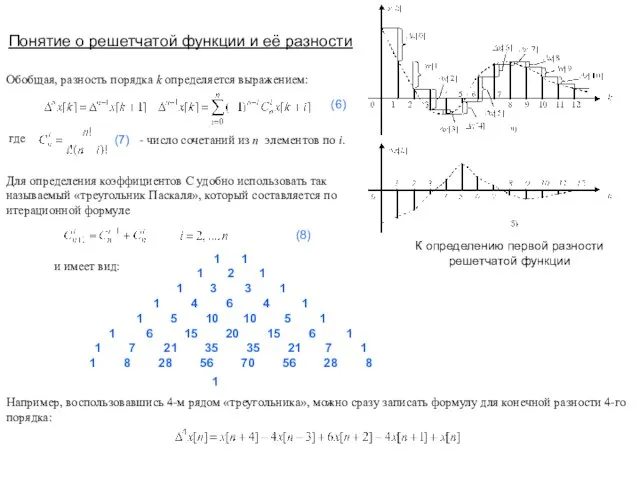
Понятие о решетчатой функции и её разности
К определению первой разности
решетчатой
Понятие о решетчатой функции и её разности
К определению первой разности
решетчатой
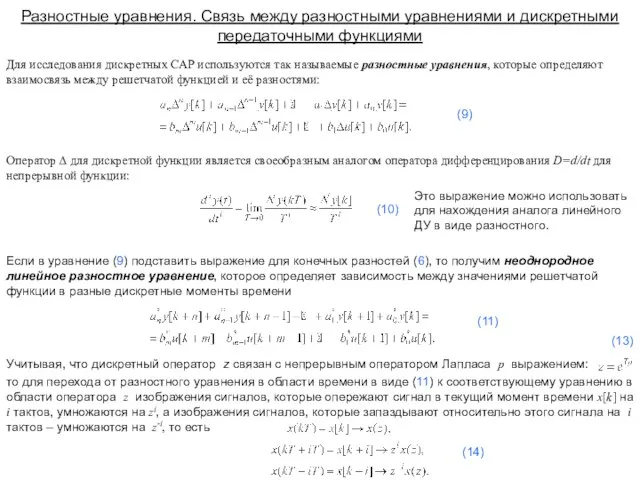
Разностные уравнения. Связь между разностными уравнениями и дискретными передаточными функциями
Для
Разностные уравнения. Связь между разностными уравнениями и дискретными передаточными функциями
Для
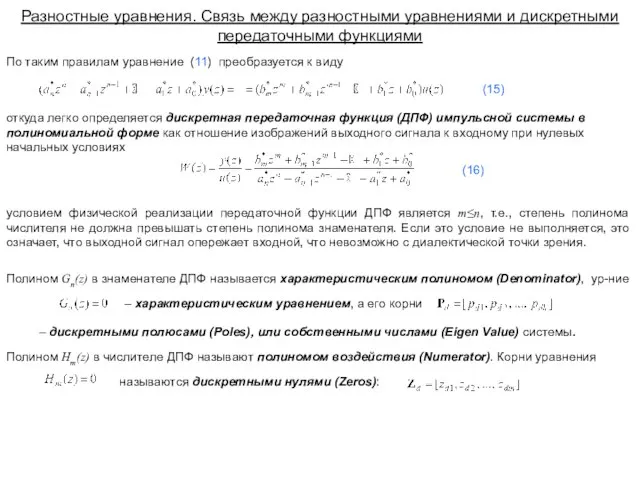
По таким правилам уравнение (11) преобразуется к виду
откуда легко определяется дискретная
По таким правилам уравнение (11) преобразуется к виду
откуда легко определяется дискретная
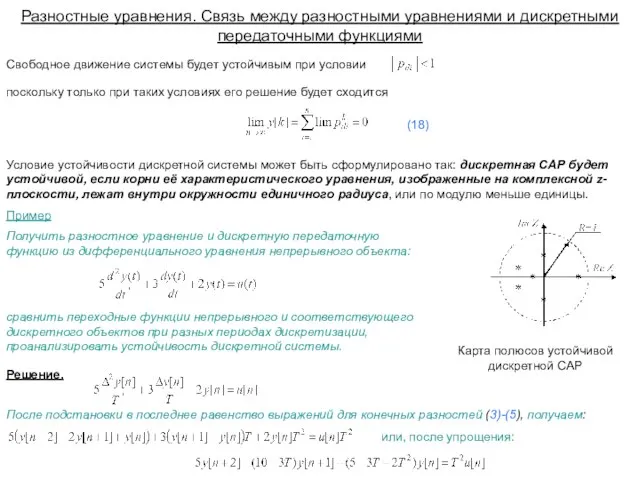
Условие устойчивости дискретной системы может быть сформулировано так: дискретная САР будет
Условие устойчивости дискретной системы может быть сформулировано так: дискретная САР будет
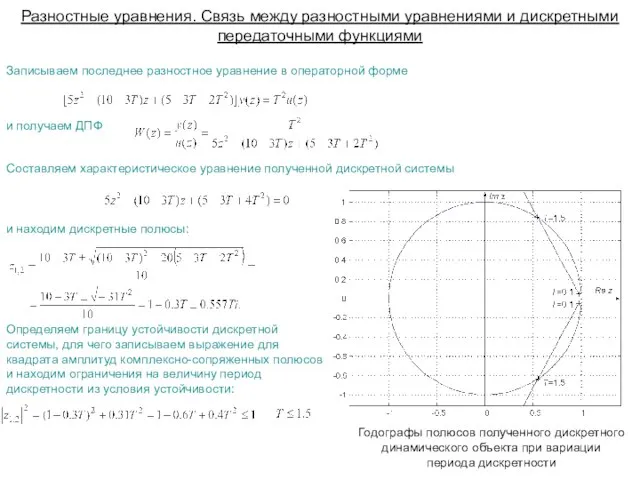
Записываем последнее разностное уравнение в операторной форме
и получаем ДПФ
Составляем
Записываем последнее разностное уравнение в операторной форме
и получаем ДПФ
Составляем
![sa=tf(1,[5 3 2]) step(sa), grid on, hold on for T=[0.25 1]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/541049/slide-7.jpg)
sa=tf(1,[5 3 2])
step(sa), grid on, hold on
for T=[0.25 1]
sd=tf(T^2,[5 -10+3*T
sa=tf(1,[5 3 2])
step(sa), grid on, hold on
for T=[0.25 1]
sd=tf(T^2,[5 -10+3*T
Дискретное преобразование Лапласа
Как известно, непрерывная функция времени x(t) при одностороннем
Дискретное преобразование Лапласа
Как известно, непрерывная функция времени x(t) при одностороннем
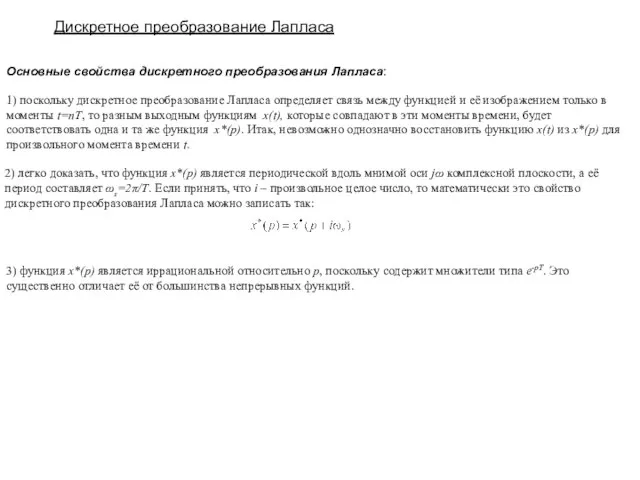
Основные свойства дискретного преобразования Лапласа:
Дискретное преобразование Лапласа
1) поскольку дискретное
Основные свойства дискретного преобразования Лапласа:
Дискретное преобразование Лапласа
1) поскольку дискретное
Z- преобразование и его свойства
Для исследования свойств цифровых систем широко
Z- преобразование и его свойства
Для исследования свойств цифровых систем широко
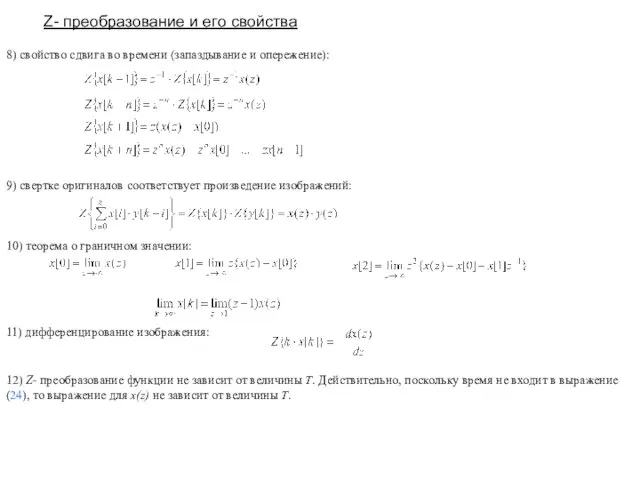
8) свойство сдвига во времени (запаздывание и опережение):
Z- преобразование и
8) свойство сдвига во времени (запаздывание и опережение):
Z- преобразование и
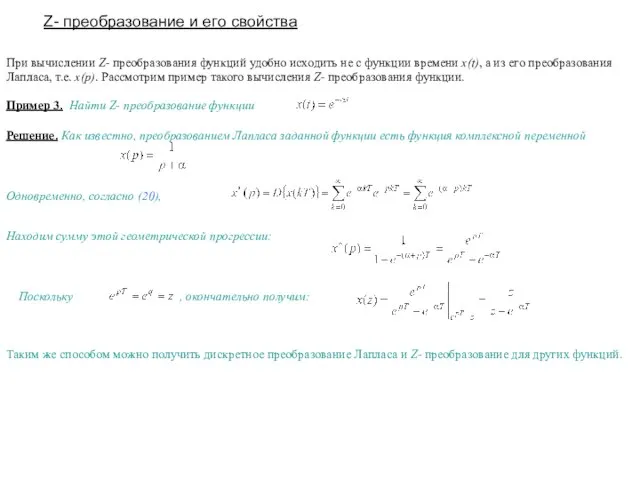
При вычислении Z- преобразования функций удобно исходить не с функции времени
При вычислении Z- преобразования функций удобно исходить не с функции времени
Преобразование Лапласа и z- преобразование для некоторых функций времени
При исследованиях
Преобразование Лапласа и z- преобразование для некоторых функций времени
При исследованиях
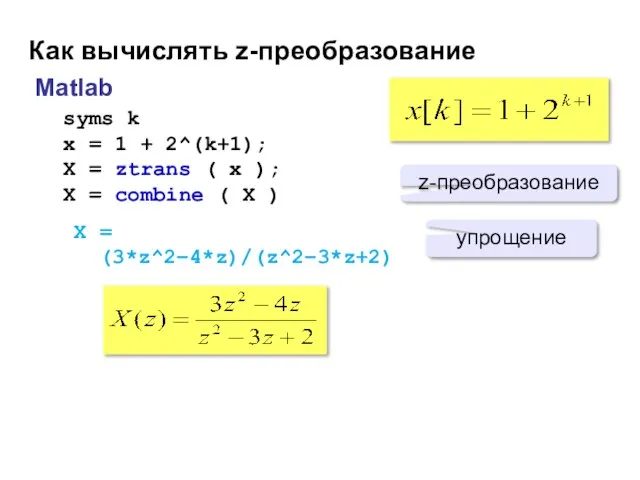
Как вычислять z-преобразование
Matlab
syms k
x = 1 + 2^(k+1);
X = ztrans (
Как вычислять z-преобразование
Matlab
syms k
x = 1 + 2^(k+1);
X = ztrans (
![Обратное z-преобразование (численно) Matlab n = [3 -4 0]; d =](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/541049/slide-15.jpg)
Обратное z-преобразование (численно)
Matlab
n = [3 -4 0];
d = [1 -3 2];
T
Обратное z-преобразование (численно)
Matlab
n = [3 -4 0];
d = [1 -3 2];
T
 Что такое религия
Что такое религия Сретение Господне
Сретение Господне yiSportCamUSB使用手册
yiSportCamUSB使用手册 Ткацкие дефекты
Ткацкие дефекты 20170327_victory_monuments_of_mtsensk_land
20170327_victory_monuments_of_mtsensk_land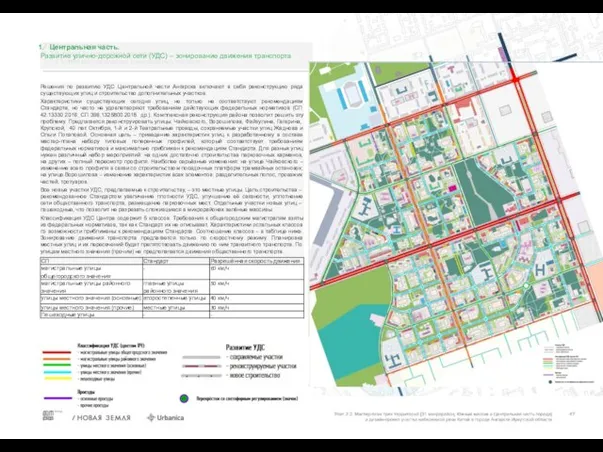 Транспорт. Развитие улично-дорожной сети (УДС) в Центральной части Ангарска
Транспорт. Развитие улично-дорожной сети (УДС) в Центральной части Ангарска Lirika_russkogo_roka
Lirika_russkogo_roka красоты первые цветы 2020 (2)
красоты первые цветы 2020 (2) Ознакомление с задачей в два действия
Ознакомление с задачей в два действия Лекция_6_муж_здоровье,_инсулинорезистентность
Лекция_6_муж_здоровье,_инсулинорезистентность урок_22
урок_22 Стандарты обслуживания магазинов ДНС
Стандарты обслуживания магазинов ДНС Russia template
Russia template Массовая культура
Массовая культура Древнерусская иконопись
Древнерусская иконопись городецкая резьба
городецкая резьба Работа с недвижимостью
Работа с недвижимостью Ремонт и монтаж систем отопления, водоснабжения и канализации
Ремонт и монтаж систем отопления, водоснабжения и канализации Виды работ по производственной практике
Виды работ по производственной практике БФ Допомога армії України
БФ Допомога армії України Англійські колонії в Північній Америці
Англійські колонії в Північній Америці Стеклянные изделия и стекло
Стеклянные изделия и стекло Автоблокировка. Блок-участок
Автоблокировка. Блок-участок Процесс технического обслуживания и ремонтов машиностроительного предприятия на основе систем автоматизации ТОиР
Процесс технического обслуживания и ремонтов машиностроительного предприятия на основе систем автоматизации ТОиР Сравнение инвестиционной привлекательности ПАО Роснефть и ПАО Башнефть
Сравнение инвестиционной привлекательности ПАО Роснефть и ПАО Башнефть Численное моделирование теплового состояния диска турбины высокого давления при модернизации турбореактивного двигателя
Численное моделирование теплового состояния диска турбины высокого давления при модернизации турбореактивного двигателя ЗАКРЕПЛЕНИЕ
ЗАКРЕПЛЕНИЕ Өсімдік майының түрлері және сапасына қойылатын талаптар
Өсімдік майының түрлері және сапасына қойылатын талаптар