- Основы проектирования робототехнических систем

Содержание
- 2. Лекции ОПР Цель дисциплины: Знакомство со структурой роботов и методиками проектирования облика. Основные вопросы: Роботы. Основные
- 3. Робот: Исполнительное устройство с двумя или более программируемыми степенями подвижности, обладающее определенным уровнем автономности и способное
- 5. Структурная схема промышленного робота
- 6. Эволюция роботов Мы изменяем роботов и среду, а они меняют нас. У человека, среды и роботов
- 7. Промышленные роботы (ПР) Стационарные роботы – манипуляторы Мобильный манипулятор
- 8. Использование роботизированных устройств, в частности, роботов-манипуляторов, позволяет выполнять работу в случаях, когда привлечение космонавта по тем
- 9. 1959 г. - Первый аппарат на Луне 1966 г. - Первый в мире перелёт на другую
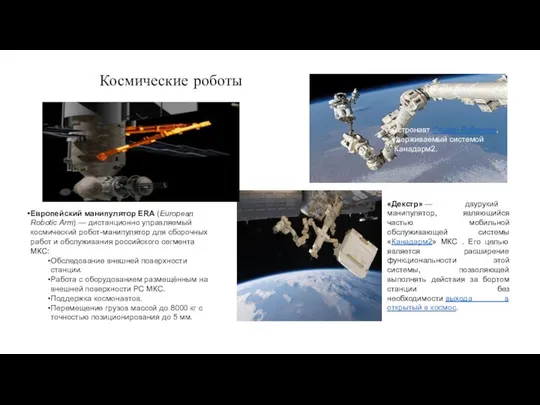
- 10. Космические роботы
- 11. Сервисные роботы Робот-”игрушка” Для детей, малоподвижных пациентов, одиноких, пожилых людей. Речевое общение Психологическая помощь в домашних
- 12. Сервисный Робот – информационный ассистент
- 13. Мобильные помощники Мобильность Передвижение по комнате Манипуляторы Физическое взаимодействие с человеком Оценка состояния человека Помощь в
- 14. Использование роботов в мире ПР
- 15. Робот «Маша» (МАИ, 2020г.)
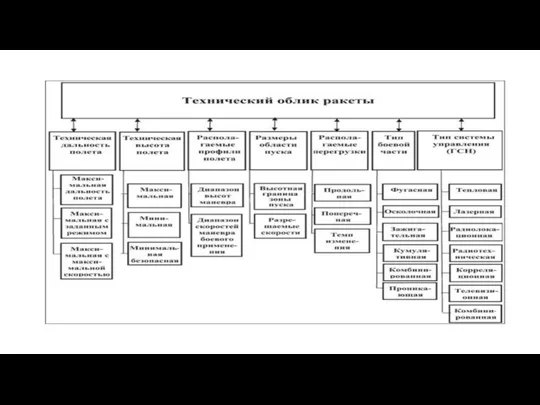
- 16. Принципы системного подхода при исследовании и проектировании роботов. Облик. Цель проектирования (модернизация (улучшение, адаптация, …), изобретение,
- 17. Системный подход Системный подход — направление методологии научного познания, в основе которого лежит рассмотрение объекта как
- 18. Основные определения Система — совокупность взаимосвязанных элементов, образующих целостность или единство. Структура — способ взаимодействия элементов
- 19. Используемые аспекты системного подхода системно-элементного или системно-комплексного, состоящего в выявлении элементов, составляющих данную систему; системно-структурного, заключающегося
- 20. Структурная схема промышленного робота, Облик. Как устроен робот Облик – технический, эксплуатационный, экономический и т.д. Технический
- 21. Пример аппаратной структуры
- 22. Вычислительная система
- 23. Системы управления роботами - манипуляторами
- 24. Подсистемы мобильного робота Скорость, проходимость, грузоподъемность, маневренность – МОБИЛЬНАЯ ПЛАТФОРМА (МП) Шагающие Это изображение, автор: Неизвестный
- 25. Манипулятор Разработка манипулятора с учётом грузоподъемности Разработка захватного устройства (схвата) Управление манипулятором Очувствление манипулятора
- 26. Варианты захватного устройства Высокоточные приводы Системы параллельного, согласованного управления Датчики положения Очувствление манипулятора
- 27. Зрение робота Видео/мультиспектральные камеры Сенсоры глубины Лазерные сканеры Прочие датчики
- 28. Распознавание объектов
- 29. Речевое общение
- 30. Безопасность человека – основа робототехники Коллаборативные роботы - коботы Факторы, влияющие на безопасность человека: - допустимые
- 31. Что должны уметь студенты Тестировать параметры, выявлять неисправности систем и подсистем (Задача диагностики, анализа, исследования); Проводить
- 32. 3. Критерии, показатели качества Критерий (W∑) – признак, основание, правило принятия решения по оценке чего-либо на
- 33. Скалярные критерии Аддитивный критерий Если повышение качества соответствует увеличению значения ПК, то критерий максимизируется.
- 34. Скалярные критерии Мультипликативный критерий
- 35. Скалярные критерии Аддитивно - мультипликативный критерий
- 36. Векторные критерии Использование векторных критериев позволяет выбрать веса критериев без участия оператора. Векторные критерии основаны на
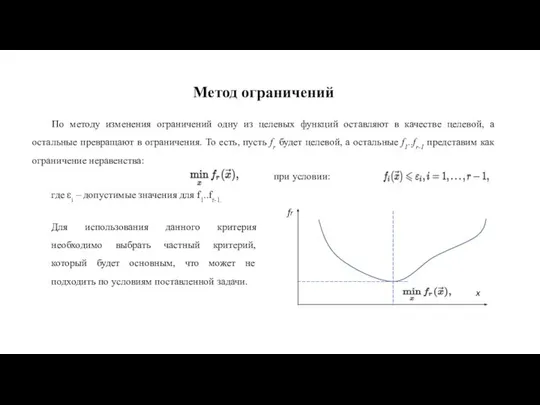
- 37. Метод ограничений По методу изменения ограничений одну из целевых функций оставляют в качестве целевой, а остальные
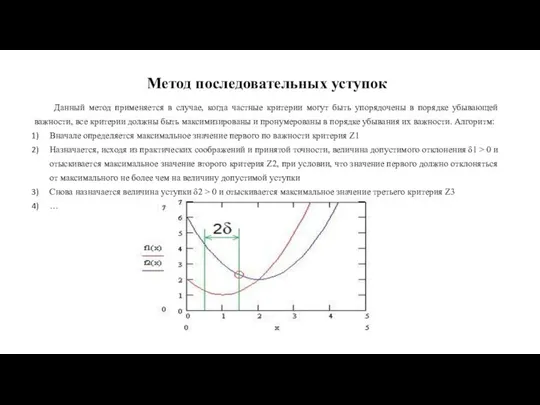
- 38. Метод последовательных уступок Данный метод применяется в случае, когда частные критерии могут быть упорядочены в порядке
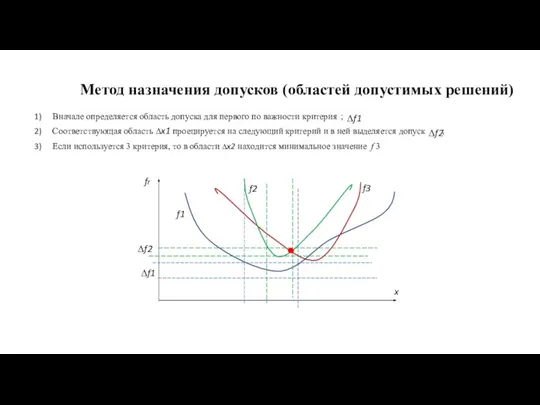
- 39. Метод назначения допусков (областей допустимых решений) Вначале определяется область допуска для первого по важности критерия ;
- 40. Оптимизация по Парето Оптимальность по Парето — такое состояние некоторой системы, при котором значение каждого частного
- 41. Оптимум по Парето подразумевает, что суммарное благосостояние общества достигает максимума, а распределение благ и ресурсов становится
- 42. Оценка частных показателей качества Wi Wi → max Wi → min Рабочий диапазон Рабочий диапазон
- 43. Производительность, быстродействие систем
- 44. Критерий производительности Wпр → max, при Wj W0∑ = max (или min) W∑ (Wi) при Wj
- 45. Надежностью называется свойство объекта (изделия) выполнять заданные функции, сохраняя во времени значения установленных эксплуатационных показателей в
- 46. Основные свойства объектов Безотказность – свойство объекта непрерывно сохранять работоспособность в течение некоторого времени или некоторой
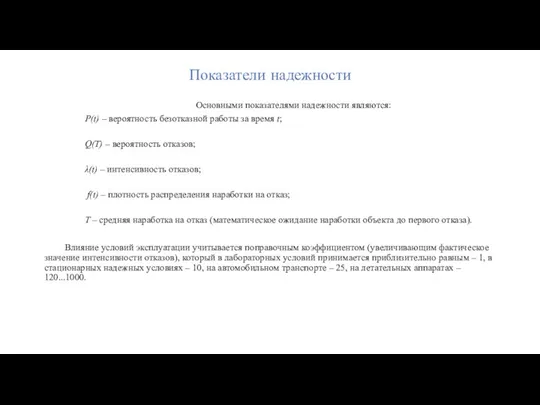
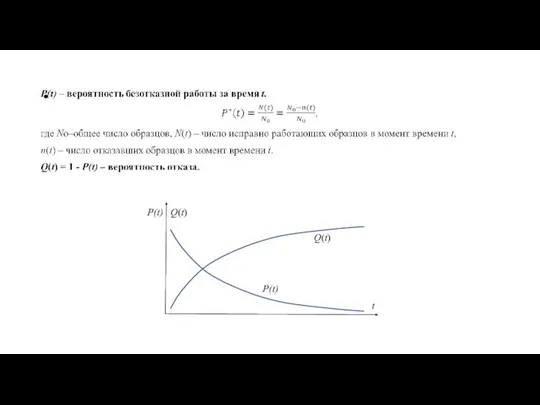
- 47. Основными показателями надежности являются: P(t) – вероятность безотказной работы за время t; Q(T) – вероятность отказов;
- 50. Перечисленные важнейшие свойства надежности характеризуют определенные технические состояния объекта. Различают пять основных видов технического состояния объектов.
- 51. При расчете надежности приборов используются заранее известные значения интенсивностей отказов для отдельных элементов и соединений. В
- 52. Надежность системы Для последовательного соединения Для параллельного соединения
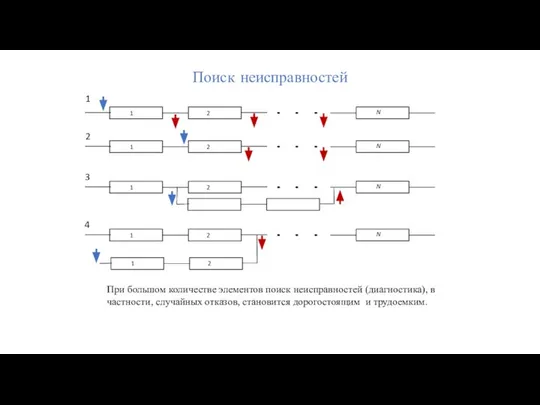
- 53. Поиск неисправностей N 1 2 1 2 1 2 3 4 При большом количестве элементов поиск
- 54. Пусть известны априорные вероятности отказов всех элементов (подсистем) P(Xi) и можно рассчитать вероятности P(Xo|Xi), где Xi
- 55. Маршрут поиска неисправностей PΣ(Xo|Xi) PΣ(Xo|Xi) PΣ(Xo|Xi)
- 56. Методы повышения надежности Выделяют три группы методов: 1. Конструктивно-технологические методы, включающие мероприятия, учитывающие условия работы ТС.
- 57. 3. Структурные методы делятся на две подгруппы: Методы, основанные на оптимизации структуры ТС без применения функциональной
- 59. Исходная система Поэлементное резервирование Системное резервирование
- 60. Одним из вариантов синтеза подобной ТС является следующий: 1. Определение количества (m1) резервных элементов для рабочего
- 61. Примеры Построить схемы резервирования ТС (поэлементную, системную); Рассчитать количество резервных элементов для каждой схемы; Cравнить количество
- 62. Испытания Контроль: входной, операционный, выходной, приемочный; сплошной, выборочный
- 63. 5. ПК. Точность технических систем (ТС) Точность Изготовление Измерение Управление
- 64. Точность изготовления Структура деталей и сборок; Базирование и силовое замыкание; Направляющие движения. Заклинивание; Конструктивные цепи; Сборка.
- 65. 6-7. Точность управления Точность управления. Переходный процесс. Гармонические колебания. Качество процессов; Элементарные звенья. Физические аналоги. Уравнение
- 66. 7. Системы автоматического управления Обеспечение точности и быстродействия движения робота В ТАУ можно выделить две характерные
- 67. Ошибки управления
- 68. Элементарные звенья
- 69. Элементарные звенья t Идеальное W(s) = 1/s
- 70. Элементарные звенья Реальное W(s) = Ts + 1.
- 71. Элементарные звенья
- 72. Элементарные звенья -180
- 73. 8. Контур САУ Соединения звеньев Вид передаточной функции объекта зависит от последовательности соединения звеньев: 1) Последовательное
- 74. Разомкнутые и замкнутые системы
- 75. ЛАФЧХ замкнутой системы
- 76. ЛАФЧХ разомкнутой системы
- 77. Переходный процесс При нулевых начальных условиях динамический режим описывается переходной характеристикой h(t) = ∆y(t) = y(t)
- 78. .
- 79. Показатели качества переходного процесса При создании САУ допустимые значения показателей качества оговариваются техническими условиями, что можно
- 80. Устойчивые и неустойчивые системы Исследование переходных процессов носит частный характер. Более общие результаты получаются при исследовании
- 81. Устойчивость и качество процессов по ЛАФЧХ Звенья: Апериодическое Апериодическое Колебательное Дифференцирующее (реал.) Апериодическое Главные проблемы: 1.
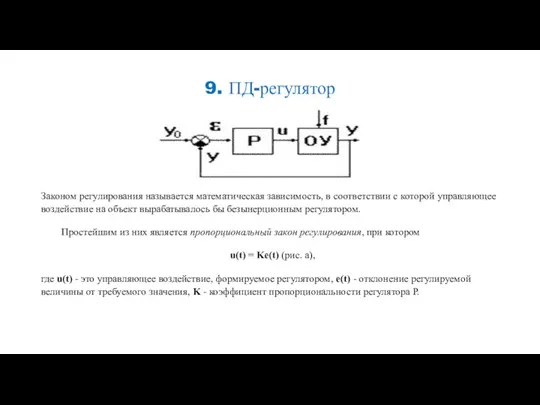
- 82. 9. ПД-регулятор Законом регулирования называется математическая зависимость, в соответствии с которой управляющее воздействие на объект вырабатывалось
- 83. То есть для создания управляющего воздействия необходимо наличие ошибки регулирования и чтобы величина этой ошибки была
- 84. Интегральный закон регулирования реализуется И-регулятором Этот регулятор наращивает управляющее воздействие до тех пор пока управляемая величина
- 85. Чтобы увеличить быстродействие обычно последовательно с ним включают усилитель, это дает пропорционально-интегральный закон регулирования (ПИ-регулятор), его
- 86. Устойчивость и качество процессов по ЛАФЧХ Звенья: Апериодическое Апериодическое Колебательное Дифференцирующее (реал.) Апериодическое Главные проблемы: 1.
- 87. Системы управления роботами Командное управление Оператор задает команды управления, в т.ч. в виде программ
- 88. Копирующее управление Робот-манипулятор копирует (всеми звеньями) движения оператора
- 89. Полуавтоматическое управление Оператор управляет только схватом
- 90. Автоматическое управление
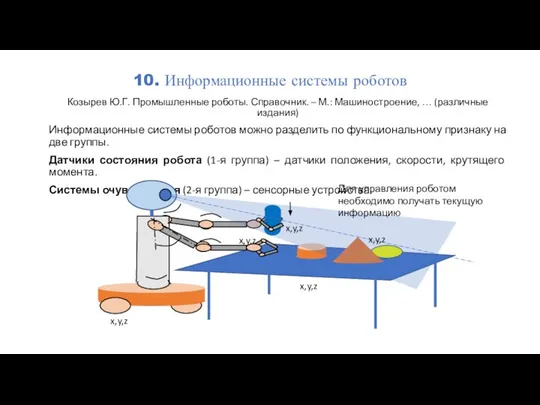
- 91. 10. Информационные системы роботов Козырев Ю.Г. Промышленные роботы. Справочник. – М.: Машиностроение, … (различные издания) Информационные
- 92. Информационные системы роботов Контроль состояния Р, Диагностика и прогнозирование состояния, Оценка положения и скорости Р, Безопасность
- 94. Система оценки положения и скорости В общем случае для оценки положения и скорости роботов (Р) используются
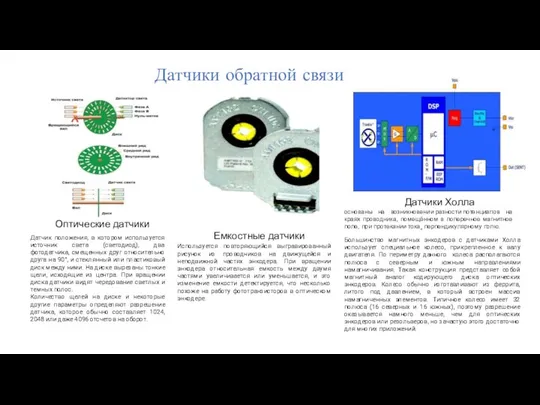
- 95. Оптические датчики Емкостные датчики Датчики Холла Большинство магнитных энкодеров с датчиками Холла использует специальное колесо, прикрепленное
- 96. Системы контроля состояния роботов обеспечивают требуемые эксплуатационные характеристики, включая эксплуатационную надежность Р, и участвует в организации
- 97. Системы контроля состояния роботов Система диагностики должна также включать, в зависимости от уровня автономности робота и
- 98. Сенсорные устройства роботов
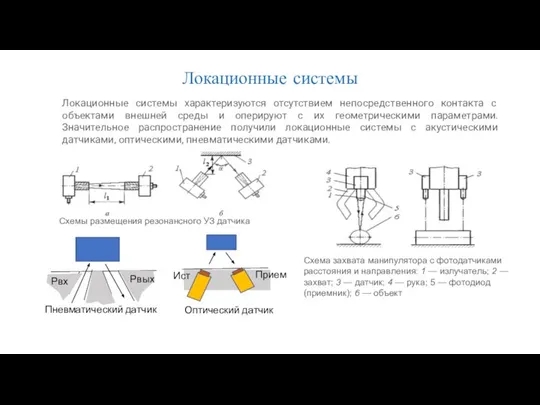
- 99. Локационные системы Локационные системы характеризуются отсутствием непосредственного контакта с объектами внешней среды и оперируют с их
- 100. Системы искусственного осязания Особенностью работы систем искусственного осязания является наличие контакта датчиков с поверхностью объекта. С
- 101. Примеры использования систем искусственного осязания
- 102. Примеры пропорциональных датчиков, объединенных в матрицы
- 103. Датчики регистрации перемещений
- 104. Датчики усилий (моментов) Датчики усилий (моментов) применяют в роботах, осуществляющих манипулирование хрупкими и легкодеформируемыми предметами или
- 105. Силомоментный датчик
- 106. Размещение датчиков на схвате
- 107. 11. Системы технического зрения Основные задачи Зрение – основной источник информации (у человека – 70 –
- 108. Схема комплексной системы наблюдения В промышленных роботах преобразования и анализ изображения осуществляются ЭВМ, входящей в состав
- 109. Решаемые задачи КСН (Системы технического зрения – КСН, компьютерное зрение, зрение роботов)
- 110. Улучшение изображений Смаз Дефокусировка Восстановление
- 111. Улучшение качества изображений путем локальной обработки с помощью выделения различных участков интереса на исходном изображении специальным
- 112. Выделение краев Алгоритмы: Робертса, Собела, Превитта, Канни и др.
- 113. Сжатие изображений Обычно принимаемые изображения содержат большой объем избыточной информации. Избыточность изображений проявляется в наличии корреляционной
- 114. Дискретное косинусное преобразование (DCT) Алгоритмы и стандарты: - RLE, LZ, DCT, Хаффмана, вейвлет- преобразования, ДКИМ, ….
- 115. Восстановление 3D изображений. Пример: стереозрение Восстановление рельефа Прокладка маршрута Могут использоваться: дальномеры различных типов, в т.ч.
- 116. Дополненная и виртуальная реальность
- 117. Поиск и обнаружение
- 118. Обнаружение (захват), слежение
- 119. Поисковые ситуации Кооперативный поиск Поиск на площади, антагонистический поиск Вторичный поиск Антагонистический поиск нарушителя, слежение
- 120. Распознавание Распознавание лиц Распознавание пород рыб Распознавание предметов
- 121. Анализ и прогноз ситуаций (понимание ситуаций) Что происходит? Что произойдет? Можно ли решить целевую задачу? Какие
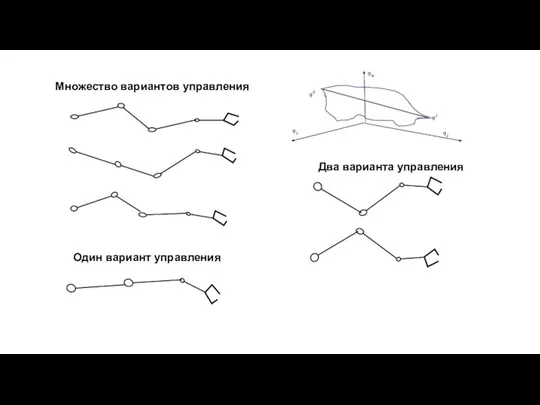
- 122. 12. Мобильные роботы Планирование маршрута (движение в заданную точку, район); Обход препятствий; Поиск объектов (ориентиров, целевой
- 123. Организация движением МР X, Y, Z
- 124. Навигация роботов Основная проблема – накопление ошибок в ИНС СНС – не работает в помещениях, в
- 125. Система управления и навигации на примере БЛА ИНС
- 126. Задачи, решаемые БЛА (БПЛА) Мониторинг; Разведка (скрытность, маскировка, обход ПВО и пр.); Транспорт; Доставка грузов; Поиск
- 127. МОБИЛЬНАЯ ПЛАТФОРМА (МП) Шагающие Это изображение, автор: Неизвестный автор, лицензия: CC BY-SA Различные показатели качества (ПК)
- 128. Навигация мобильной платформы (определение координат и ракурса) Стратегическое и локальное планирование маршрута Основная проблема – точность
- 129. 13, 14. Манипулятор Разработка манипулятора с учётом грузоподъемности Разработка схвата Управление манипулятором Очувствление манипулятора
- 130. Манипуляторы Основные понятия; Классификация манипуляторов по управлению; Кинематические схемы; Степени подвижности. Движения; Конструкции; Коэффициент сервиса; Построение
- 131. Число степеней подвижности манипулятора – сумма возможных координатных движений объекта манипулирования относительно опорной системы (стойки, основания)
- 132. В зависимости от степени участия человека в управлении манипуляционные роботы подразделяются на три тина: автоматические, биотехнические
- 133. Автоматический манипуляционный робот
- 134. Биотехнические манипуляционные роботы Различают три разновидности управления биотехническими манипуляционными роботами: копирующее, командное и полуавтоматическое. Копирующее управление
- 135. Интерактивные манипуляционные роботы отличаются активным участием человека в процессе управления, которое выражается в различных формах взаимодействия
- 136. Кинематические типы манипуляторов Декартовый тип Цилиндрический тип Сферический тип Ангулярный тип
- 137. Выбор кинематической схемы манипулятора В процессе выполнения операций с объектами манипулирования в большинстве случаев манипуляторы имитируют
- 138. Формула Сомова-Малышева Оценка степени подвижности Структурная формул кинематической цепи общего вида +W=6n–p1–2p2–3p3–4p4–5p5, где n – число
- 139. Движения манипулятора Выделяют три основные группы движений: глобальные, региональные и локальные. Глобальные движения осуществляются путем перемещения
- 140. Конструкции манипуляторов Максимальная точность
- 141. Конструкции манипуляторов Минимальная точность
- 142. Подвижность схвата
- 143. Коэффициент сервиса
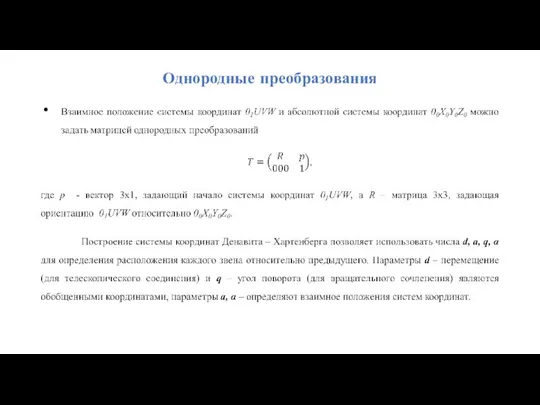
- 144. Построение системы координат Построение СК Денавита-Хартенберга для манипулятора с N степенями свободы (N-1 звеньев) Построение абсолютной
- 145. 6. Построение оси Yi. Направить ось Yi так, чтобы полученная в результате СК OiXiYiZi была правосторонней.
- 146. Системы координат манипуляторов
- 147. Управление манипуляторами Однородные преобразования; Прямая позиционная задача; Обратная позиционная задача; Выбор двигателя; Захватные устройства.
- 148. Однородные координаты и преобразования Лит-ра: Зенкевич С.Л., Ющенко А.С. Основы управления манипуляционными роботами: Учебник для вузов.
- 149. Однородные координаты Примеры Найти однородные координаты точек (0, 0, 0). (0, 0, 0, w), где w
- 150. Однородные преобразования
- 151. Однородные преобразования Примеры
- 152. Однородные преобразования
- 153. Прямая позиционная задача
- 154. Преобразования координат Вид матриц Ai зависит от способа выбора систем координат. При использовании представления Денавита –
- 155. Преобразования координат Поворот вокруг Zi на qi Поворот вокруг Xi на αi Сдвиг вдоль Zi на
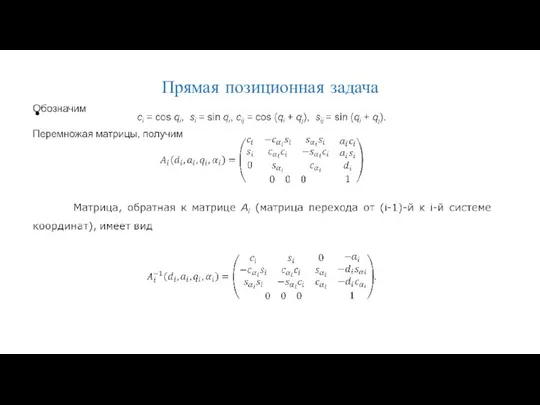
- 156. Прямая позиционная задача
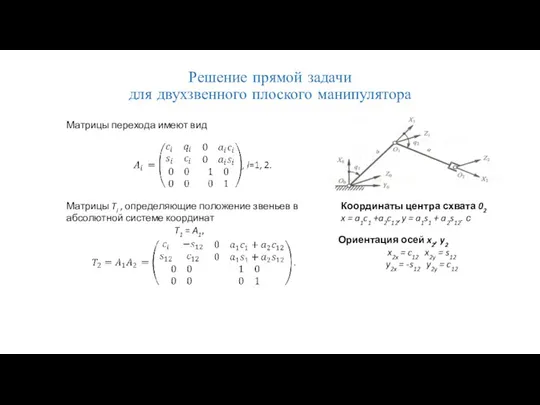
- 157. Решение прямой задачи для двухзвенного плоского манипулятора Матрицы перехода имеют вид Матрицы Ti , определяющие положение
- 158. Обратная позиционная задача При заданном положении ориентации схвата s = s* или TN = TN* найти
- 160. Существуют различные методы решения обратной задачи, в частности: 1. Метод обратных преобразований; 2. Итерационный метод; 3.
- 161. Метод обратных преобразований Матрица, определяющая положение и ориентацию схвата имеет вид TN = A1A2… AN-1 AN,
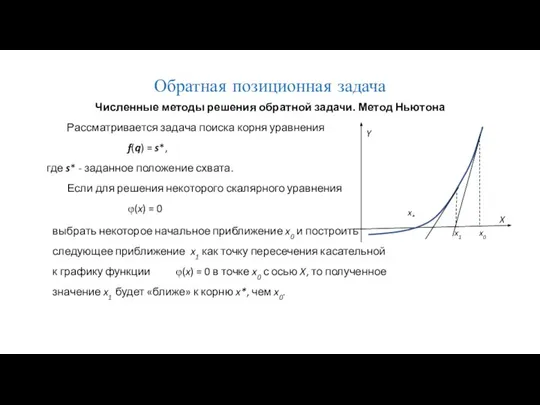
- 162. Обратная позиционная задача Численные методы решения обратной задачи. Метод Ньютона Рассматривается задача поиска корня уравнения f(q)
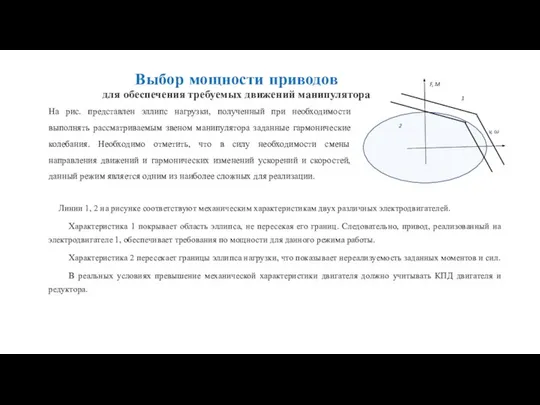
- 163. Выбор мощности приводов для обеспечения требуемых движений манипулятора
- 164. При выборе траектории необходимо, чтобы компоненты скорости vi не превышали (по модулю) максимальные скорости vimax, которые
- 165. Выбор мощности приводов для обеспечения требуемых движений манипулятора
- 166. Линии 1, 2 на рисунке соответствуют механическим характеристикам двух различных электродвигателей. Характеристика 1 покрывает область эллипса,
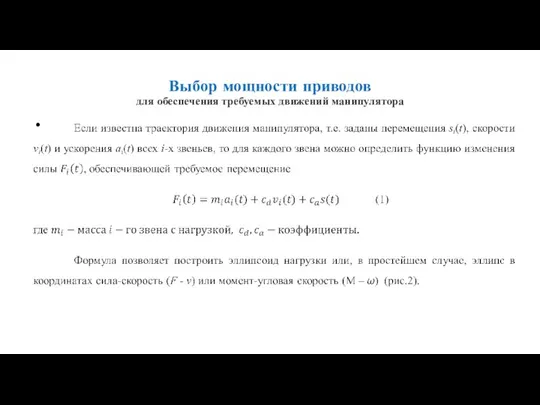
- 167. Методика выбора двигателя включает: Определение требуемых компонент движения звеньев манипулятора; Определение параметров нагрузки (масс или моментов
- 168. Захватные устройства Захватные устройства (ЗУ) промышленных роботов (ПР) и манипуляторов (М) служат для захватывания и удержания
- 169. Классификация захватных устройств (ЗУ) Различают ЗУ по принципу действия Схватывающие ЗУ удерживают объект благодаря кинематическому воздействию
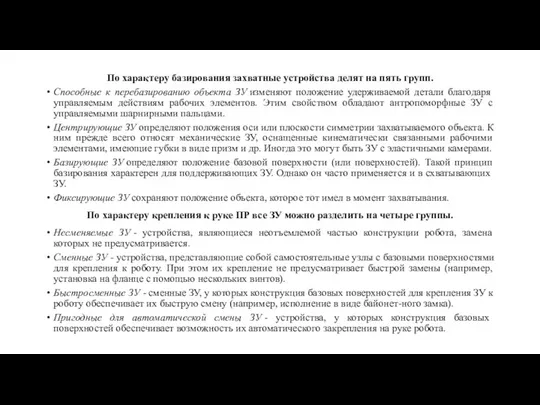
- 170. По характеру базирования захватные устройства делят на пять групп. Способные к перебазированию объекта ЗУ изменяют положение
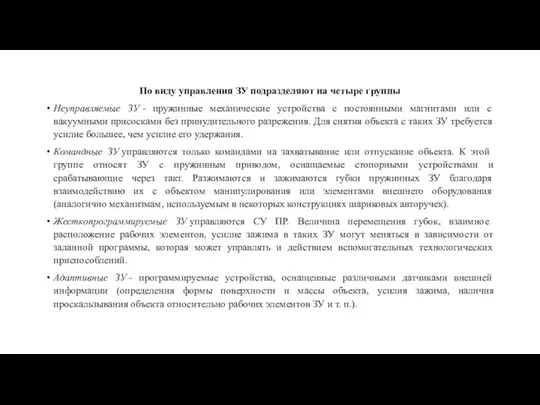
- 171. По виду управления ЗУ подразделяют на четыре группы Неуправляемые ЗУ - пружинные механические устройства с постоянными
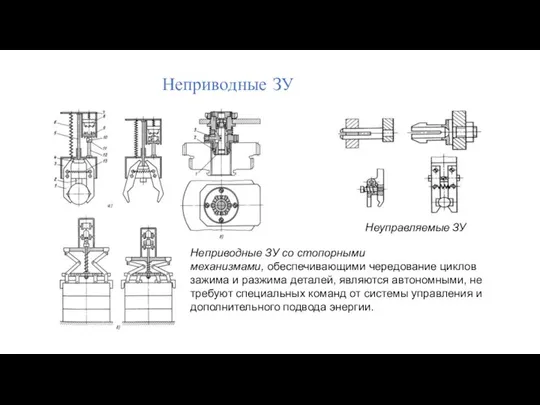
- 173. Неприводные ЗУ Неприводные ЗУ со стопорными механизмами, обеспечивающими чередование циклов зажима и разжима деталей, являются автономными,
- 174. Широкодиапазонные механические ЗУ с рычажными передаточными механизмами и пневматическим приводом
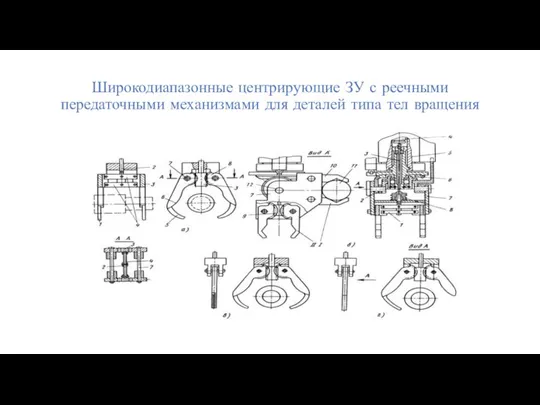
- 175. Широкодиапазонные центрирующие ЗУ с реечными передаточными механизмами для деталей типа тел вращения
- 176. Центрирующие широкодиапазонные механические ЗУ с параллельным перемещением губок, осуществляемым комбинацией реечных и рычажных передач
- 177. Элементы вакуумных и электромагнитных ЗУ
- 178. ЗУ с эластичными камерами
- 179. Адаптивные ЗУ
- 180. 15. Человек - робот Задачи Выполнение роботом тяжелых, рутинных операций; Помощь при выполнении сложных операций (удаленое
- 181. Виды взаимодействия Ч - Р
- 182. Системы управления роботами - манипуляторами
- 183. Каналы связи Ч - Р
- 184. Инженерная психология Комплексы, объединяющие работу ТС (в т.ч. роботов) и человека, называются эргатическими или системой “человек
- 185. Проектирование СЧМ Эффективность работы СЧМ зависит от согласованности действий человека - оператора и отдельных подсистем ТС.
- 186. Структура СЧМ Информация о состоянии объекта управления (ОУ), например, манипулятора, выдается устройством преобразования и обработки информации
- 187. Схема СЧМ Человек: производительность, точность, надежность, ……. Робот: производительность, точность, надежность, …….
- 188. Характеристики оператора При проектировании СЧМ оператор рассматривается как одно из звеньев данной системы (Ч – Р,
- 189. Основными характеристиками человека-оператора являются: быстродействие и пропускная способность оператора, определяющие его производительность, а также точность, надежность
- 190. Если оператору предъявляется один из n заранее известных сигналов и он должен выбрать соответствующее движение, то
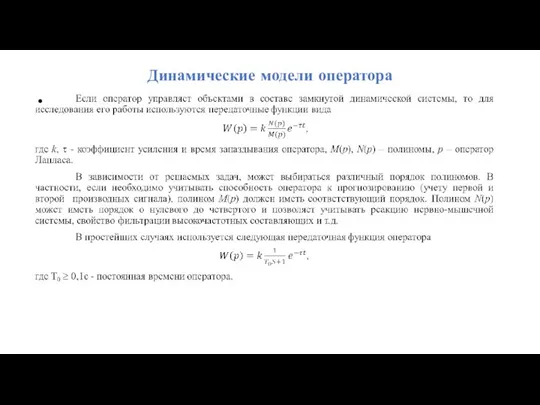
- 191. Динамические модели оператора
- 192. Точность работы оператора Точность определяет степень соответствия выполнения опреатором определенных функций предписанному алгоритму. Показатель точности может
- 193. Надежность оператора Надежность оператора - это способность выполнять в полном объеме возложенные на него функции при
- 194. Безопасность человека – основа робототехники Коллаборативные роботы - коботы Факторы, влияющие на безопасность человека: - допустимые
- 196. Скачать презентацию
Лекции ОПР
Цель дисциплины:
Знакомство со структурой роботов и методиками проектирования облика.
Основные
Лекции ОПР
Цель дисциплины:
Знакомство со структурой роботов и методиками проектирования облика.
Основные
Робот: Исполнительное устройство с двумя или более программируемыми степенями подвижности, обладающее определенным
Робот: Исполнительное устройство с двумя или более программируемыми степенями подвижности, обладающее определенным

Структурная схема промышленного робота
Структурная схема промышленного робота
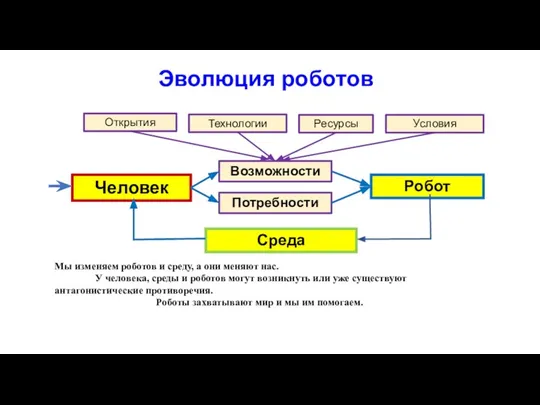
Эволюция роботов
Мы изменяем роботов и среду, а они меняют нас.
У
Эволюция роботов
Мы изменяем роботов и среду, а они меняют нас.
У

Промышленные роботы (ПР)
Стационарные роботы – манипуляторы
Мобильный
манипулятор
Промышленные роботы (ПР)
Стационарные роботы – манипуляторы
Мобильный
манипулятор
Использование роботизированных устройств, в частности, роботов-манипуляторов, позволяет выполнять работу в случаях,
Использование роботизированных устройств, в частности, роботов-манипуляторов, позволяет выполнять работу в случаях,
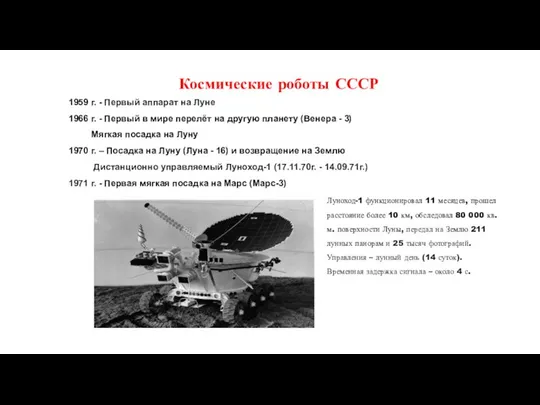
1959 г. - Первый аппарат на Луне
1966 г. - Первый в
1959 г. - Первый аппарат на Луне
1966 г. - Первый в
Космические роботы
Космические роботы
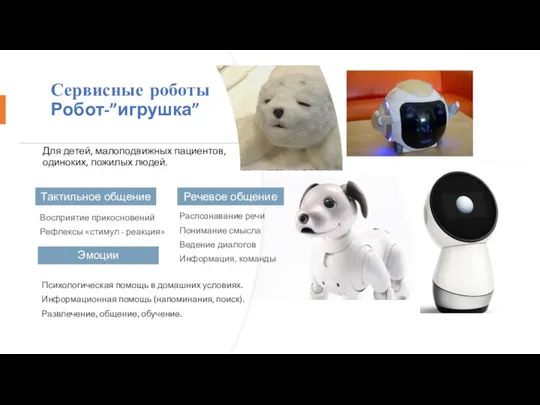
Сервисные роботы
Робот-”игрушка”
Для детей, малоподвижных пациентов, одиноких, пожилых людей.
Речевое общение
Психологическая помощь в
Сервисные роботы
Робот-”игрушка”
Для детей, малоподвижных пациентов, одиноких, пожилых людей.
Речевое общение
Психологическая помощь в
Сервисный Робот – информационный ассистент
Сервисный Робот – информационный ассистент
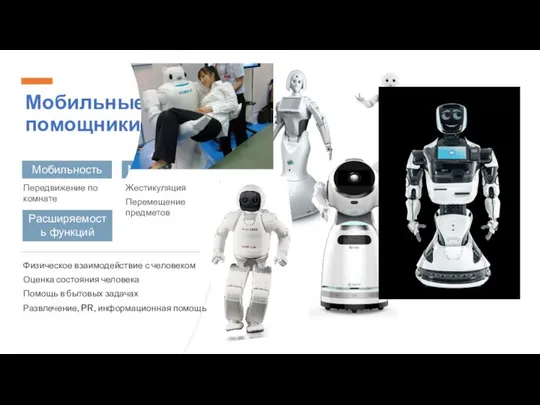
Мобильные помощники
Мобильность
Передвижение по комнате
Манипуляторы
Физическое взаимодействие с человеком
Оценка состояния человека
Помощь в бытовых
Мобильные помощники
Мобильность
Передвижение по комнате
Манипуляторы
Физическое взаимодействие с человеком
Оценка состояния человека
Помощь в бытовых
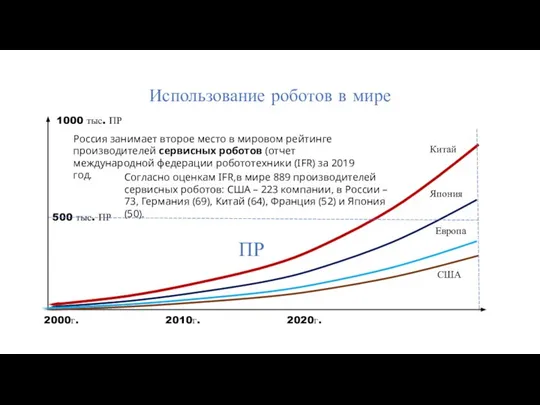
Использование роботов в мире
ПР
Использование роботов в мире
ПР
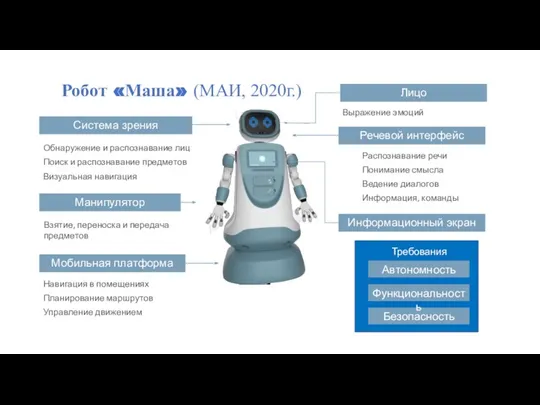
Робот «Маша» (МАИ, 2020г.)
Робот «Маша» (МАИ, 2020г.)
Принципы системного подхода при исследовании и проектировании роботов.
Облик. Цель проектирования
Принципы системного подхода при исследовании и проектировании роботов.
Облик. Цель проектирования
Системный подход
Системный подход — направление методологии научного познания, в основе которого лежит
Системный подход
Системный подход — направление методологии научного познания, в основе которого лежит
Основные определения
Система — совокупность взаимосвязанных элементов, образующих целостность или единство.
Структура — способ взаимодействия
Основные определения
Система — совокупность взаимосвязанных элементов, образующих целостность или единство.
Структура — способ взаимодействия
Используемые аспекты системного подхода
системно-элементного или системно-комплексного, состоящего в выявлении элементов, составляющих
Используемые аспекты системного подхода
системно-элементного или системно-комплексного, состоящего в выявлении элементов, составляющих
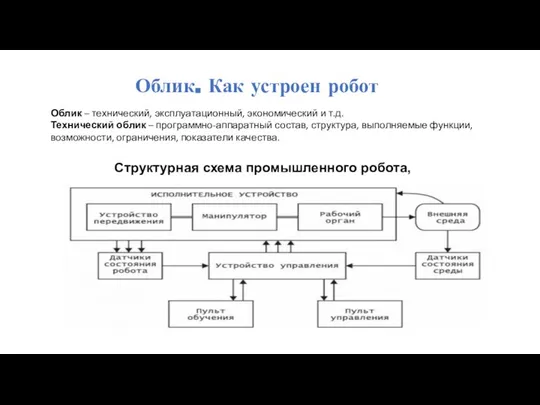
Структурная схема промышленного робота,
Облик. Как устроен робот
Облик – технический, эксплуатационный, экономический
Структурная схема промышленного робота,
Облик. Как устроен робот
Облик – технический, эксплуатационный, экономический
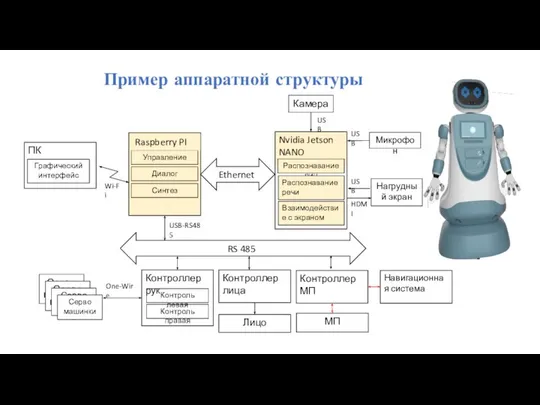
Пример аппаратной структуры
Пример аппаратной структуры
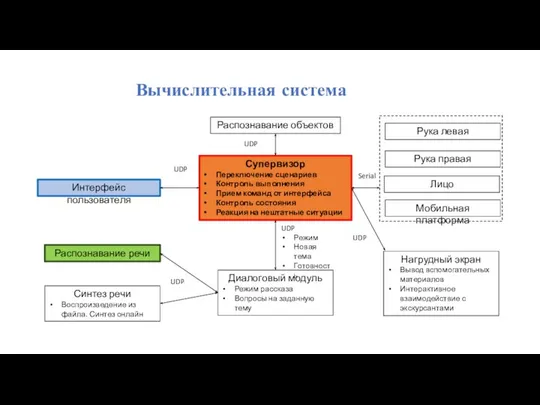
Вычислительная система
Вычислительная система
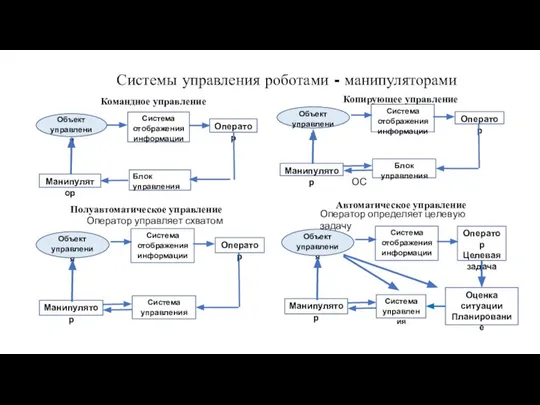
Системы управления роботами - манипуляторами
Системы управления роботами - манипуляторами

Подсистемы мобильного робота
Скорость, проходимость, грузоподъемность, маневренность – МОБИЛЬНАЯ ПЛАТФОРМА (МП)
Шагающие
Это изображение,
Подсистемы мобильного робота
Скорость, проходимость, грузоподъемность, маневренность – МОБИЛЬНАЯ ПЛАТФОРМА (МП)
Шагающие
Это изображение,

Манипулятор
Разработка манипулятора с учётом грузоподъемности
Разработка захватного устройства (схвата)
Управление манипулятором
Очувствление манипулятора
Манипулятор
Разработка манипулятора с учётом грузоподъемности
Разработка захватного устройства (схвата)
Управление манипулятором
Очувствление манипулятора

Варианты захватного устройства
Высокоточные приводы
Системы параллельного, согласованного управления
Датчики положения
Очувствление манипулятора
Варианты захватного устройства
Высокоточные приводы
Системы параллельного, согласованного управления
Датчики положения
Очувствление манипулятора
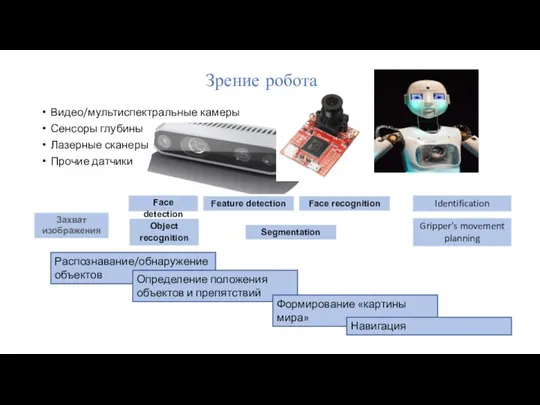
Зрение робота
Видео/мультиспектральные камеры
Сенсоры глубины
Лазерные сканеры
Прочие датчики
Зрение робота
Видео/мультиспектральные камеры
Сенсоры глубины
Лазерные сканеры
Прочие датчики

Распознавание объектов
Распознавание объектов

Речевое общение
Речевое общение
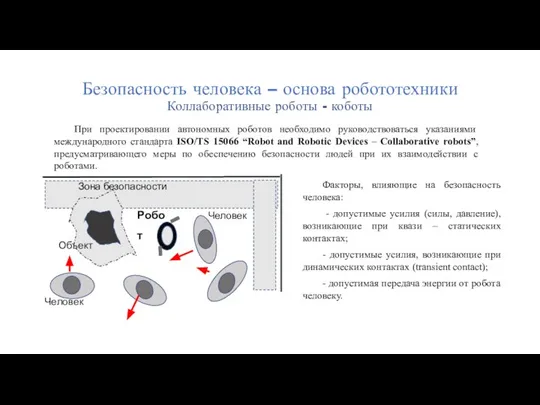
Безопасность человека – основа робототехники
Коллаборативные роботы - коботы
Факторы, влияющие на безопасность
Безопасность человека – основа робототехники
Коллаборативные роботы - коботы
Факторы, влияющие на безопасность
Что должны уметь студенты
Тестировать параметры, выявлять неисправности систем и подсистем (Задача
Что должны уметь студенты
Тестировать параметры, выявлять неисправности систем и подсистем (Задача
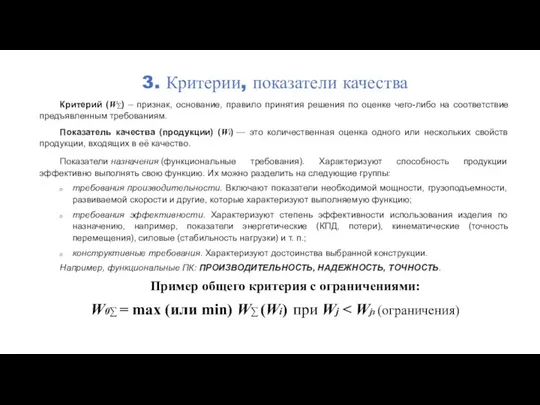
3. Критерии, показатели качества
Критерий (W∑) – признак, основание, правило принятия решения
3. Критерии, показатели качества
Критерий (W∑) – признак, основание, правило принятия решения
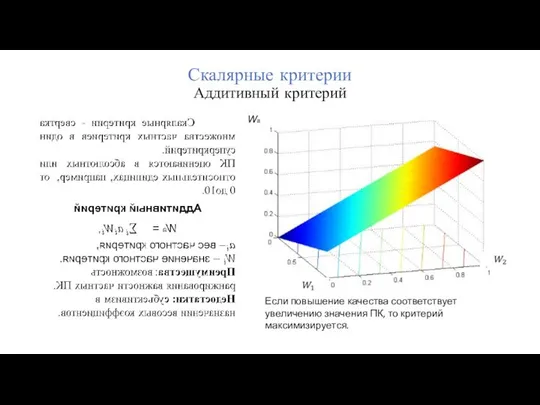
Скалярные критерии
Аддитивный критерий
Если повышение качества соответствует увеличению значения ПК, то критерий
Скалярные критерии
Аддитивный критерий
Если повышение качества соответствует увеличению значения ПК, то критерий
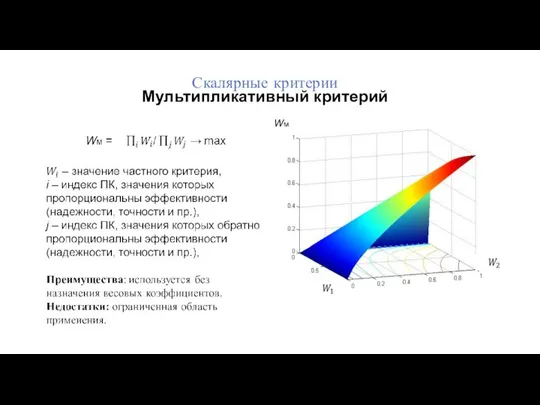
Скалярные критерии
Мультипликативный критерий
Скалярные критерии
Мультипликативный критерий
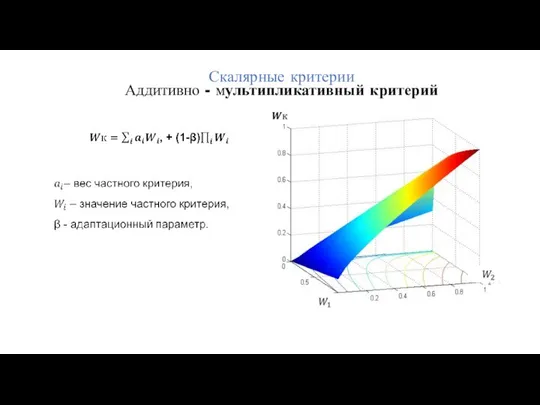
Скалярные критерии
Аддитивно - мультипликативный критерий
Скалярные критерии
Аддитивно - мультипликативный критерий
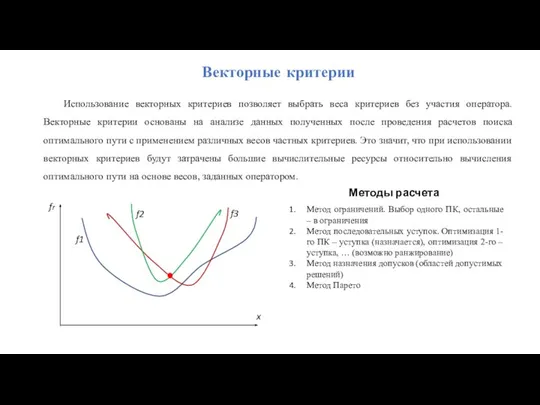
Векторные критерии
Использование векторных критериев позволяет выбрать веса критериев без участия оператора.
Векторные критерии
Использование векторных критериев позволяет выбрать веса критериев без участия оператора.
Метод ограничений
По методу изменения ограничений одну из целевых функций оставляют в
Метод ограничений
По методу изменения ограничений одну из целевых функций оставляют в
Метод последовательных уступок
Данный метод применяется в случае, когда частные критерии могут
Метод последовательных уступок
Данный метод применяется в случае, когда частные критерии могут
Метод назначения допусков (областей допустимых решений)
Вначале определяется область допуска для первого
Метод назначения допусков (областей допустимых решений)
Вначале определяется область допуска для первого
Оптимизация по Парето
Оптимальность по Парето — такое состояние некоторой системы, при котором
Оптимизация по Парето
Оптимальность по Парето — такое состояние некоторой системы, при котором
Оптимум по Парето подразумевает, что суммарное благосостояние общества достигает максимума, а распределение благ и
Оптимум по Парето подразумевает, что суммарное благосостояние общества достигает максимума, а распределение благ и
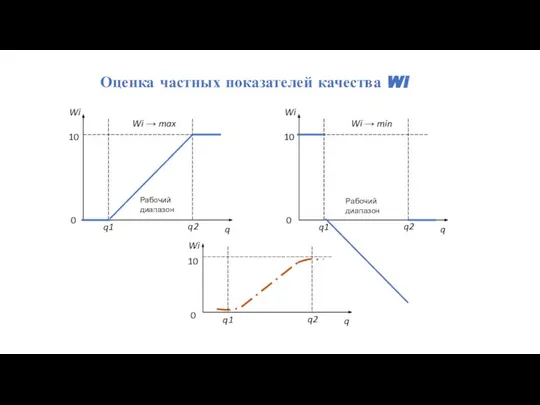
Оценка частных показателей качества Wi
Wi → max
Wi → min
Рабочий
диапазон
Рабочий
диапазон
Оценка частных показателей качества Wi
Wi → max
Wi → min
Рабочий
диапазон
Рабочий
диапазон
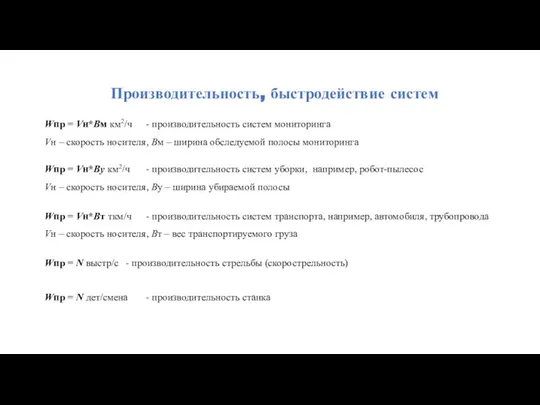
Производительность, быстродействие систем
Производительность, быстродействие систем
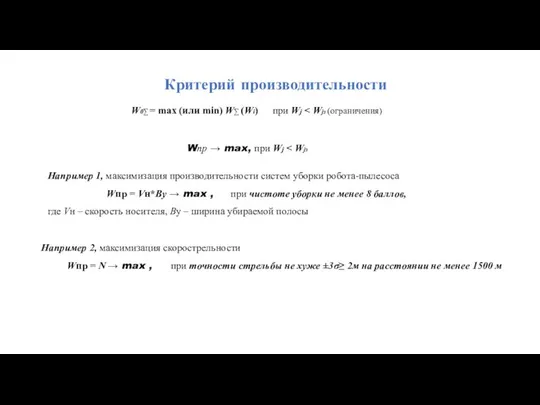
Критерий производительности
Wпр → max, при Wj < Wjз
W0∑ = max
Критерий производительности
Wпр → max, при Wj < Wjз
W0∑ = max
Надежностью называется свойство объекта (изделия) выполнять заданные функции, сохраняя во времени
Надежностью называется свойство объекта (изделия) выполнять заданные функции, сохраняя во времени
Основные свойства объектов
Безотказность – свойство объекта непрерывно сохранять работоспособность в течение
Основные свойства объектов
Безотказность – свойство объекта непрерывно сохранять работоспособность в течение
Основными показателями надежности являются:
P(t) – вероятность безотказной работы за время t;
Основными показателями надежности являются:
P(t) – вероятность безотказной работы за время t;

Перечисленные важнейшие свойства надежности характеризуют определенные технические состояния объекта.
Различают пять
Перечисленные важнейшие свойства надежности характеризуют определенные технические состояния объекта.
Различают пять
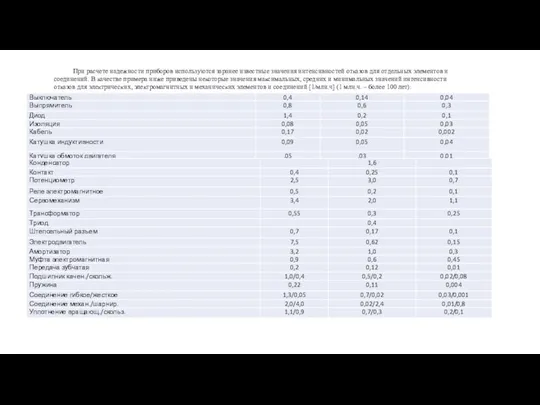
При расчете надежности приборов используются заранее известные значения интенсивностей отказов для
При расчете надежности приборов используются заранее известные значения интенсивностей отказов для
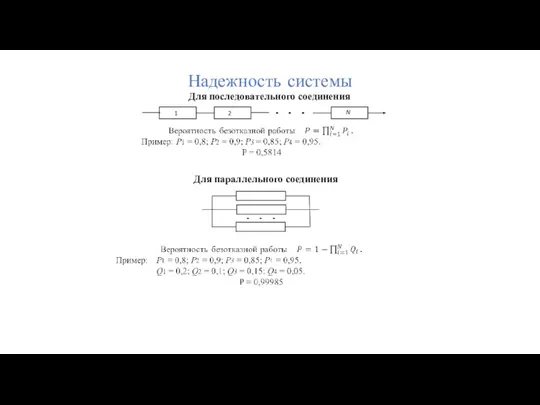
Надежность системы
Для последовательного соединения
Для параллельного соединения
Надежность системы
Для последовательного соединения
Для параллельного соединения
Поиск неисправностей
N
1
2
1
2
1
2
3
4
При большом количестве элементов поиск неисправностей (диагностика), в частности, случайных
Поиск неисправностей
N
1
2
1
2
1
2
3
4
При большом количестве элементов поиск неисправностей (диагностика), в частности, случайных
Пусть известны априорные вероятности отказов всех элементов (подсистем) P(Xi) и можно
Пусть известны априорные вероятности отказов всех элементов (подсистем) P(Xi) и можно
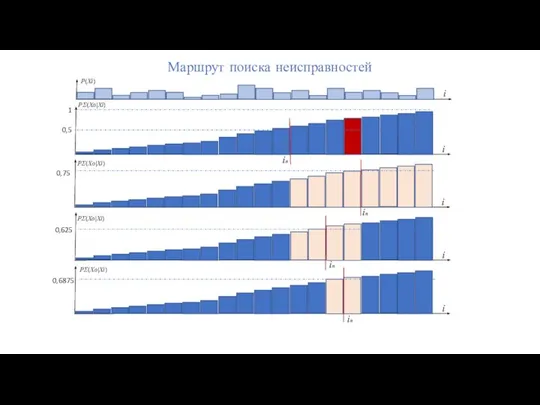
Маршрут поиска неисправностей
PΣ(Xo|Xi)
PΣ(Xo|Xi)
PΣ(Xo|Xi)
Маршрут поиска неисправностей
PΣ(Xo|Xi)
PΣ(Xo|Xi)
PΣ(Xo|Xi)
Методы повышения надежности
Выделяют три группы методов:
1. Конструктивно-технологические методы, включающие мероприятия,
Методы повышения надежности
Выделяют три группы методов:
1. Конструктивно-технологические методы, включающие мероприятия,
3. Структурные методы делятся на две подгруппы:
Методы, основанные на оптимизации структуры
3. Структурные методы делятся на две подгруппы:
Методы, основанные на оптимизации структуры


Исходная система
Поэлементное резервирование
Системное резервирование
Исходная система
Поэлементное резервирование
Системное резервирование

Одним из вариантов синтеза подобной ТС является следующий:
1. Определение количества (m1)
Одним из вариантов синтеза подобной ТС является следующий:
1. Определение количества (m1)
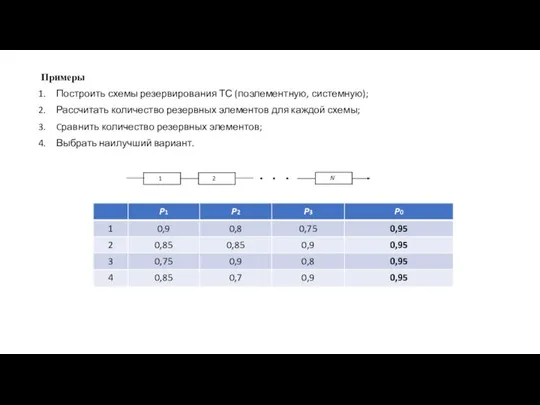
Примеры
Построить схемы резервирования ТС (поэлементную, системную);
Рассчитать количество резервных элементов для каждой
Примеры
Построить схемы резервирования ТС (поэлементную, системную);
Рассчитать количество резервных элементов для каждой
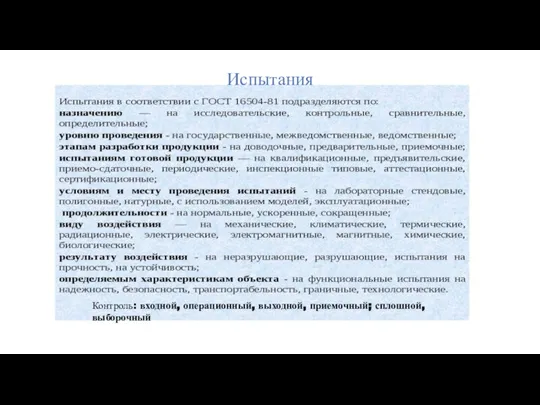
Испытания
Контроль: входной, операционный, выходной, приемочный; сплошной, выборочный
Испытания
Контроль: входной, операционный, выходной, приемочный; сплошной, выборочный
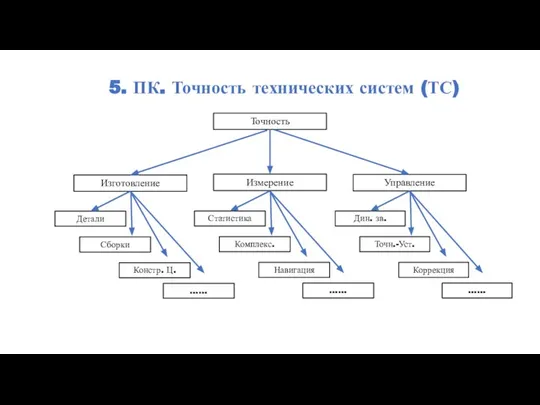
5. ПК. Точность технических систем (ТС)
Точность
Изготовление
Измерение
Управление
5. ПК. Точность технических систем (ТС)
Точность
Изготовление
Измерение
Управление
Точность изготовления
Структура деталей и сборок;
Базирование и силовое замыкание;
Направляющие движения. Заклинивание;
Конструктивные цепи;
Сборка.
Точность изготовления
Структура деталей и сборок;
Базирование и силовое замыкание;
Направляющие движения. Заклинивание;
Конструктивные цепи;
Сборка.
6-7. Точность управления
Точность управления. Переходный процесс. Гармонические колебания. Качество процессов;
Элементарные звенья.
6-7. Точность управления
Точность управления. Переходный процесс. Гармонические колебания. Качество процессов;
Элементарные звенья.
7. Системы автоматического управления Обеспечение точности и быстродействия движения робота
В ТАУ
7. Системы автоматического управления Обеспечение точности и быстродействия движения робота
В ТАУ
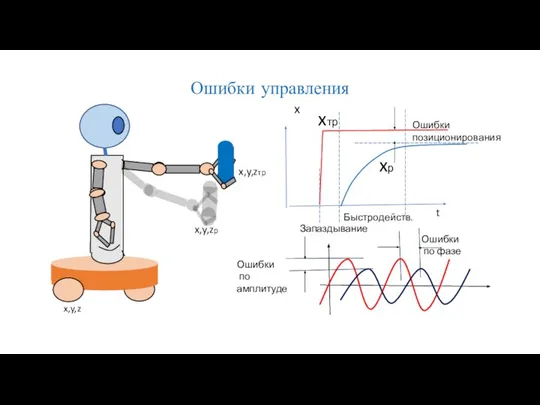
Ошибки управления
Ошибки управления
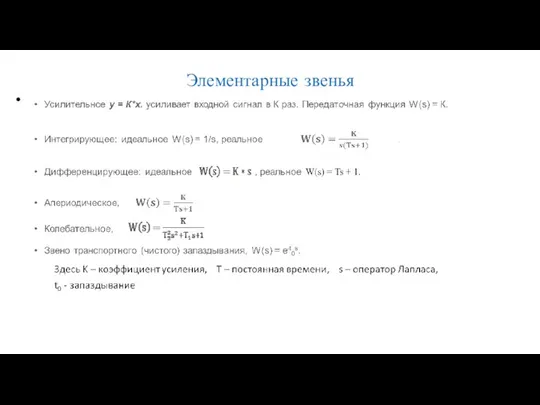
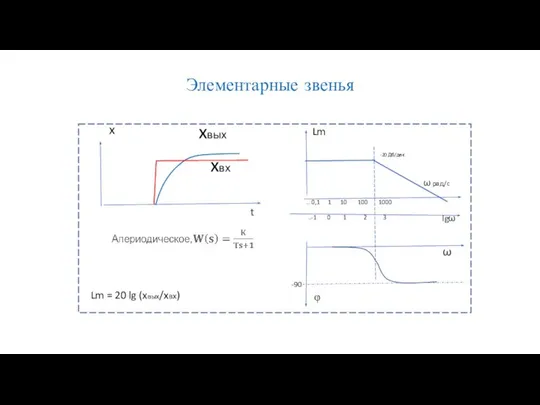
Элементарные звенья
Элементарные звенья
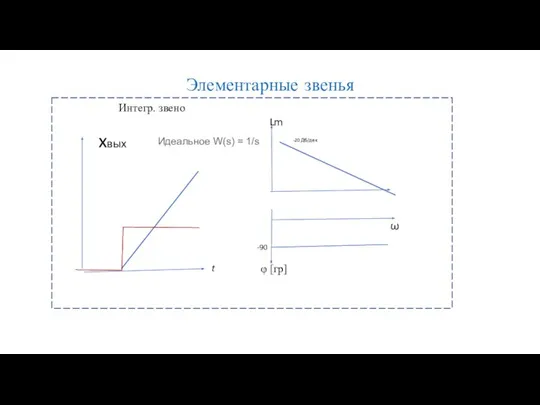
Элементарные звенья
t
Идеальное W(s) = 1/s
Элементарные звенья
t
Идеальное W(s) = 1/s
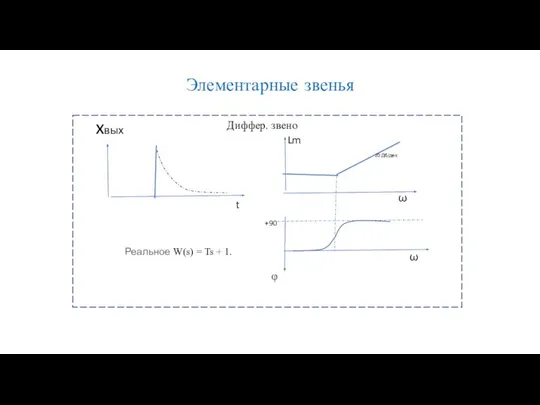
Элементарные звенья
Реальное W(s) = Ts + 1.
Элементарные звенья
Реальное W(s) = Ts + 1.
Элементарные звенья
Элементарные звенья
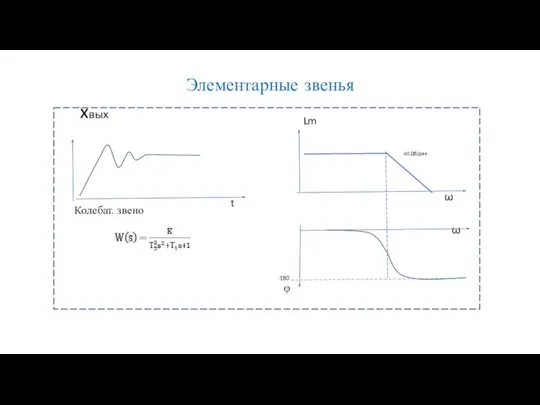
Элементарные звенья
-180
Элементарные звенья
-180
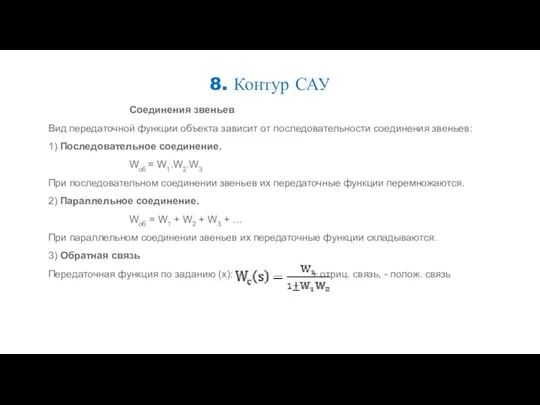
8. Контур САУ
Соединения звеньев
Вид передаточной функции объекта зависит от последовательности соединения
8. Контур САУ
Соединения звеньев
Вид передаточной функции объекта зависит от последовательности соединения
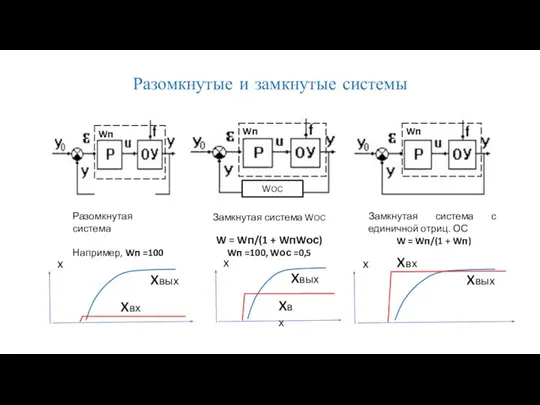
Разомкнутые и замкнутые системы
Разомкнутые и замкнутые системы
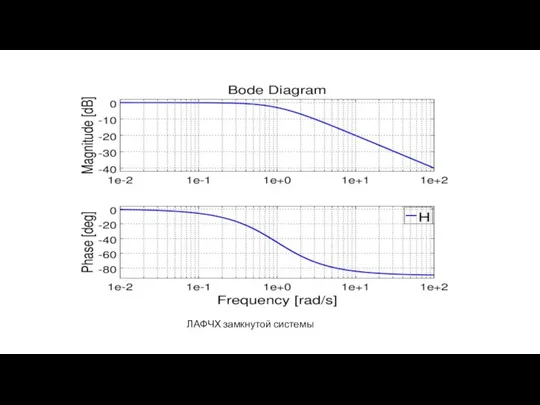
ЛАФЧХ замкнутой системы
ЛАФЧХ замкнутой системы
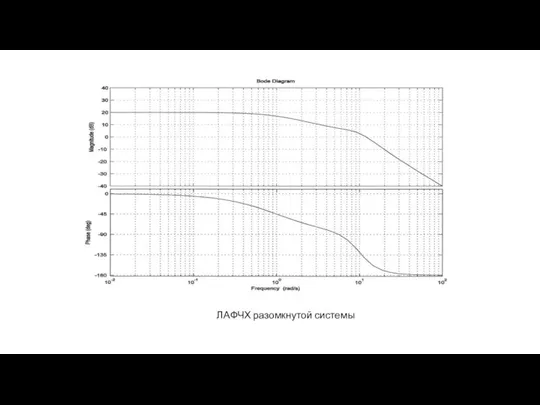
ЛАФЧХ разомкнутой системы
ЛАФЧХ разомкнутой системы
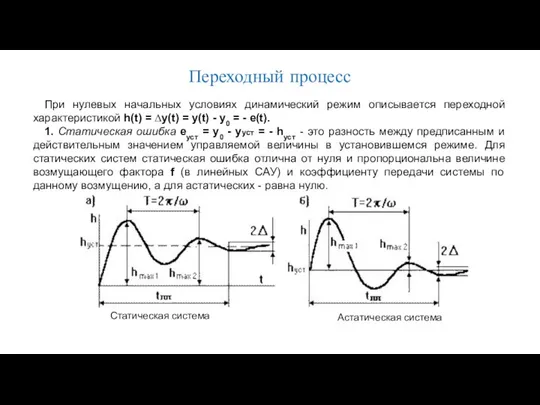
Переходный процесс
При нулевых начальных условиях динамический режим описывается переходной характеристикой h(t)
Переходный процесс
При нулевых начальных условиях динамический режим описывается переходной характеристикой h(t)

.
.
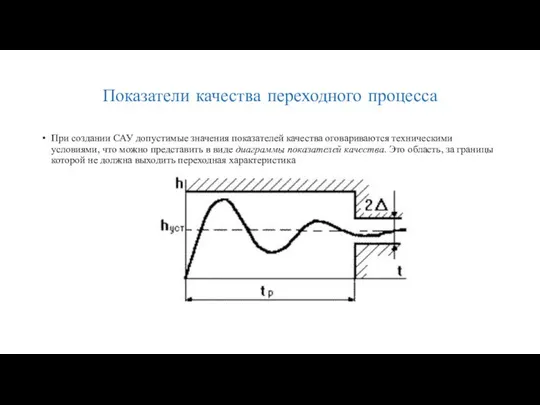
Показатели качества переходного процесса
При создании САУ допустимые значения показателей качества оговариваются
Показатели качества переходного процесса
При создании САУ допустимые значения показателей качества оговариваются
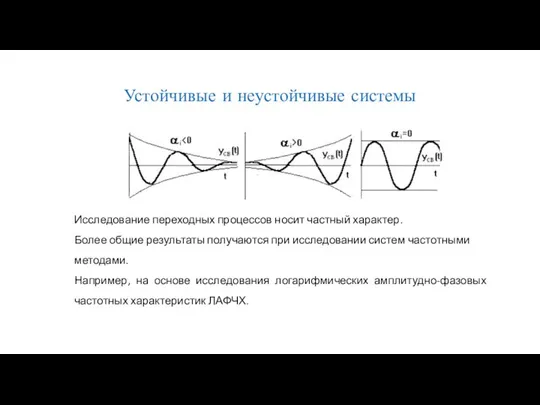
Устойчивые и неустойчивые системы
Исследование переходных процессов носит частный характер.
Более общие результаты
Устойчивые и неустойчивые системы
Исследование переходных процессов носит частный характер.
Более общие результаты
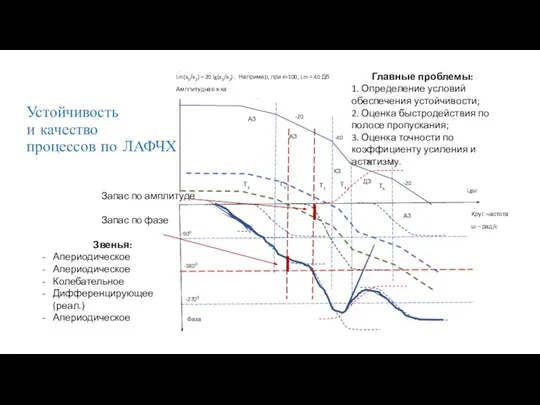
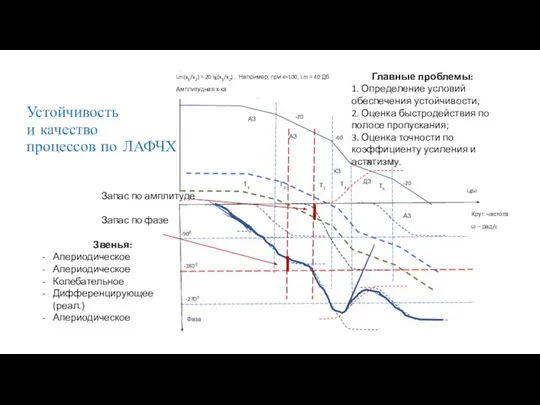
Устойчивость
и качество
процессов по ЛАФЧХ
Звенья:
Апериодическое
Апериодическое
Колебательное
Дифференцирующее (реал.)
Апериодическое
Главные проблемы:
1. Определение условий обеспечения устойчивости;
2. Оценка
Устойчивость
и качество
процессов по ЛАФЧХ
Звенья:
Апериодическое
Апериодическое
Колебательное
Дифференцирующее (реал.)
Апериодическое
Главные проблемы:
1. Определение условий обеспечения устойчивости;
2. Оценка
9. ПД-регулятор
Законом регулирования называется математическая зависимость, в соответствии с которой
9. ПД-регулятор
Законом регулирования называется математическая зависимость, в соответствии с которой
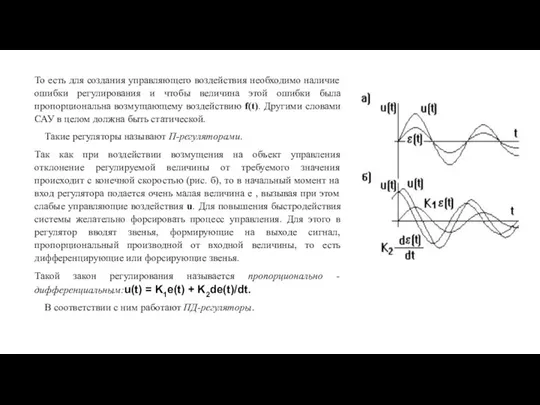
То есть для создания управляющего воздействия необходимо наличие ошибки регулирования и
То есть для создания управляющего воздействия необходимо наличие ошибки регулирования и
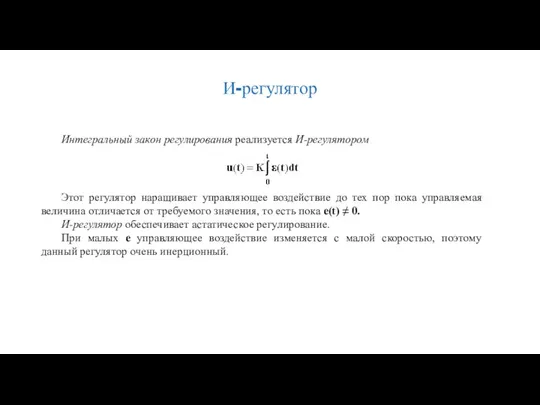
Интегральный закон регулирования реализуется И-регулятором
Этот регулятор наращивает управляющее воздействие до тех
Интегральный закон регулирования реализуется И-регулятором
Этот регулятор наращивает управляющее воздействие до тех
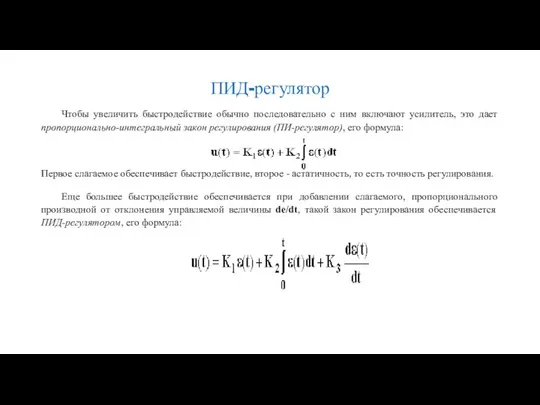
Чтобы увеличить быстродействие обычно последовательно с ним включают усилитель, это дает
Чтобы увеличить быстродействие обычно последовательно с ним включают усилитель, это дает
Устойчивость
и качество
процессов по ЛАФЧХ
Звенья:
Апериодическое
Апериодическое
Колебательное
Дифференцирующее (реал.)
Апериодическое
Главные проблемы:
1. Определение условий обеспечения устойчивости;
2. Оценка
Устойчивость
и качество
процессов по ЛАФЧХ
Звенья:
Апериодическое
Апериодическое
Колебательное
Дифференцирующее (реал.)
Апериодическое
Главные проблемы:
1. Определение условий обеспечения устойчивости;
2. Оценка
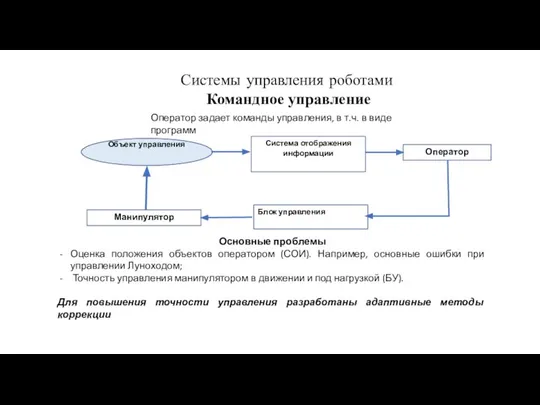
Системы управления роботами
Командное управление
Оператор задает команды управления, в т.ч. в виде
Системы управления роботами
Командное управление
Оператор задает команды управления, в т.ч. в виде
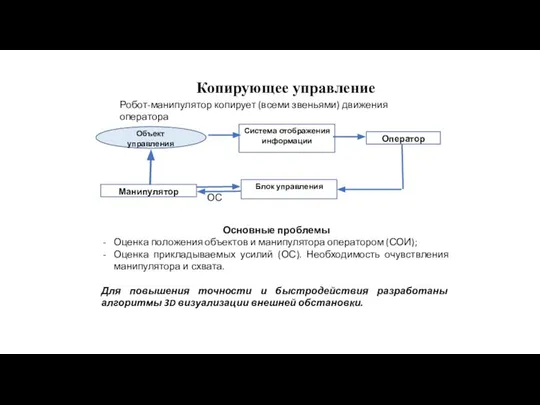
Копирующее управление
Робот-манипулятор копирует (всеми звеньями) движения оператора
Копирующее управление
Робот-манипулятор копирует (всеми звеньями) движения оператора
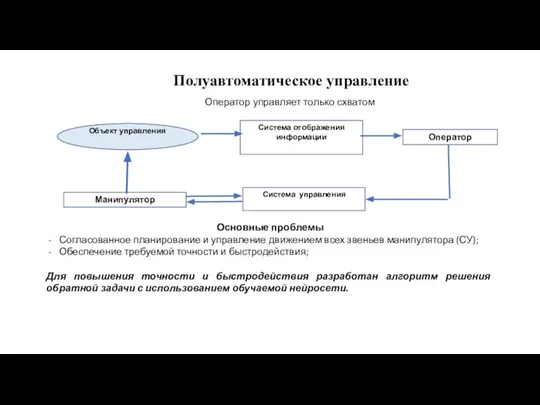
Полуавтоматическое управление
Оператор управляет только схватом
Полуавтоматическое управление
Оператор управляет только схватом
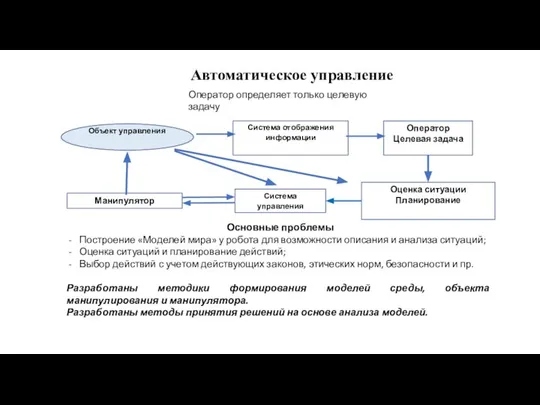
Автоматическое управление
Автоматическое управление
10. Информационные системы роботов
Козырев Ю.Г. Промышленные роботы. Справочник. – М.: Машиностроение,
10. Информационные системы роботов
Козырев Ю.Г. Промышленные роботы. Справочник. – М.: Машиностроение,
Информационные системы роботов
Контроль состояния Р,
Диагностика и прогнозирование состояния,
Оценка положения и
Информационные системы роботов
Контроль состояния Р,
Диагностика и прогнозирование состояния,
Оценка положения и


Система оценки положения и скорости
В общем случае для оценки положения и
Система оценки положения и скорости
В общем случае для оценки положения и
Оптические датчики
Емкостные датчики
Датчики Холла
Большинство магнитных энкодеров с датчиками Холла использует специальное
Оптические датчики
Емкостные датчики
Датчики Холла
Большинство магнитных энкодеров с датчиками Холла использует специальное
Системы контроля состояния роботов
обеспечивают требуемые эксплуатационные характеристики, включая эксплуатационную надежность Р,
Системы контроля состояния роботов
обеспечивают требуемые эксплуатационные характеристики, включая эксплуатационную надежность Р,
Системы контроля состояния роботов
Система диагностики должна также включать, в зависимости от
Системы контроля состояния роботов
Система диагностики должна также включать, в зависимости от
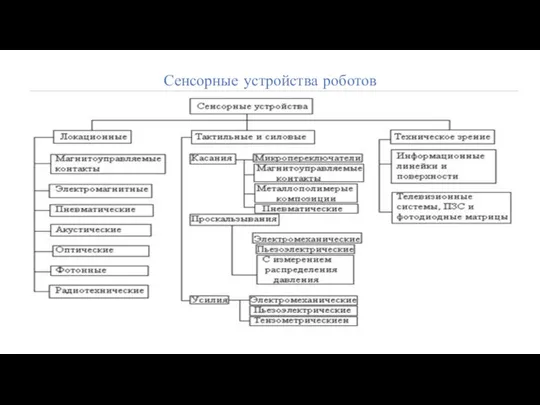
Сенсорные устройства роботов
Сенсорные устройства роботов
Локационные системы
Локационные системы характеризуются отсутствием непосредственного контакта с объектами внешней среды
Локационные системы
Локационные системы характеризуются отсутствием непосредственного контакта с объектами внешней среды
Системы искусственного осязания
Особенностью работы систем искусственного осязания является наличие контакта датчиков
Системы искусственного осязания
Особенностью работы систем искусственного осязания является наличие контакта датчиков
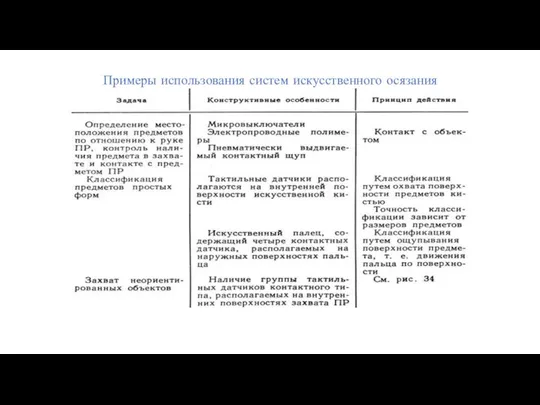
Примеры использования систем искусственного осязания
Примеры использования систем искусственного осязания

Примеры пропорциональных датчиков, объединенных в матрицы
Примеры пропорциональных датчиков, объединенных в матрицы
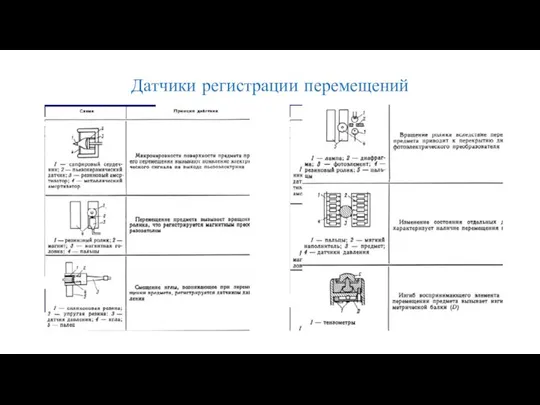
Датчики регистрации перемещений
Датчики регистрации перемещений
Датчики усилий (моментов)
Датчики усилий (моментов) применяют в роботах, осуществляющих манипулирование хрупкими
Датчики усилий (моментов)
Датчики усилий (моментов) применяют в роботах, осуществляющих манипулирование хрупкими
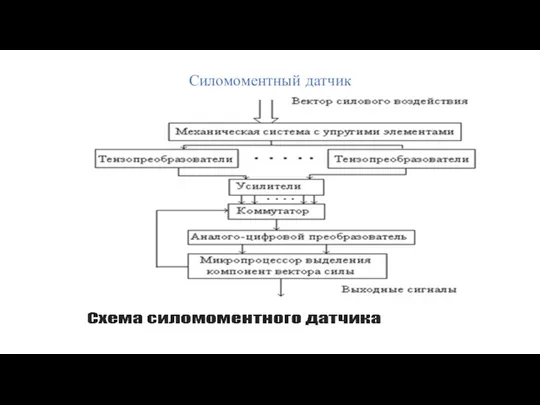
Силомоментный датчик
Силомоментный датчик
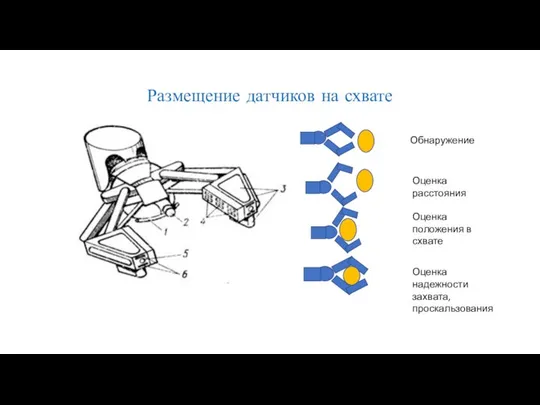
Размещение датчиков на схвате
Размещение датчиков на схвате
11. Системы технического зрения
Основные задачи
Зрение – основной источник информации (у человека
11. Системы технического зрения
Основные задачи
Зрение – основной источник информации (у человека
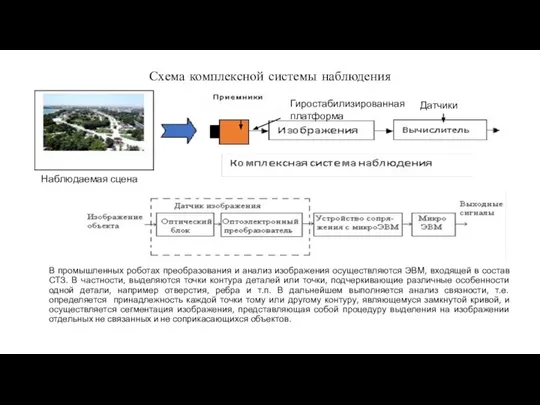
Схема комплексной системы наблюдения
В промышленных роботах преобразования и анализ изображения осуществляются
Схема комплексной системы наблюдения
В промышленных роботах преобразования и анализ изображения осуществляются
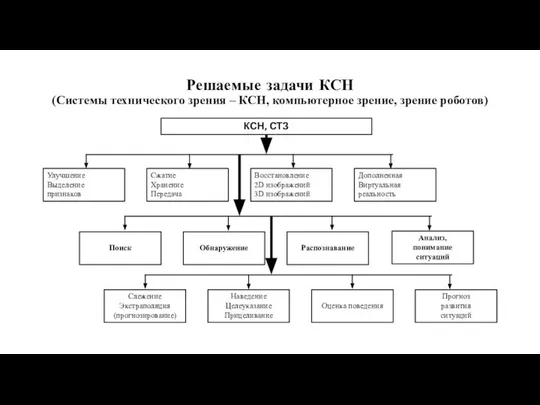
Решаемые задачи КСН
(Системы технического зрения – КСН, компьютерное зрение, зрение
Решаемые задачи КСН (Системы технического зрения – КСН, компьютерное зрение, зрение
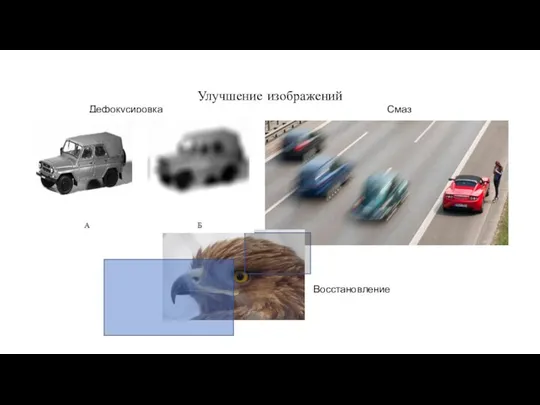
Улучшение изображений
Смаз
Дефокусировка
Восстановление
Улучшение изображений
Смаз
Дефокусировка
Восстановление
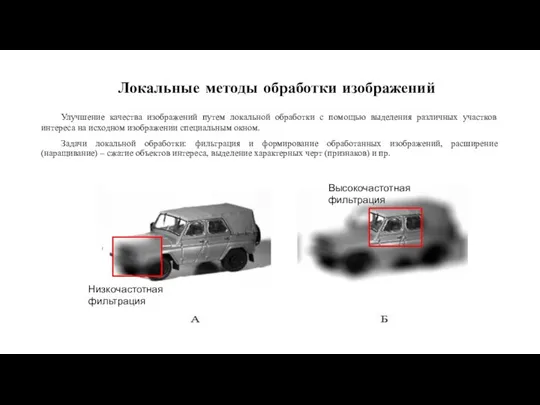
Улучшение качества изображений путем локальной обработки с помощью выделения различных участков
Улучшение качества изображений путем локальной обработки с помощью выделения различных участков
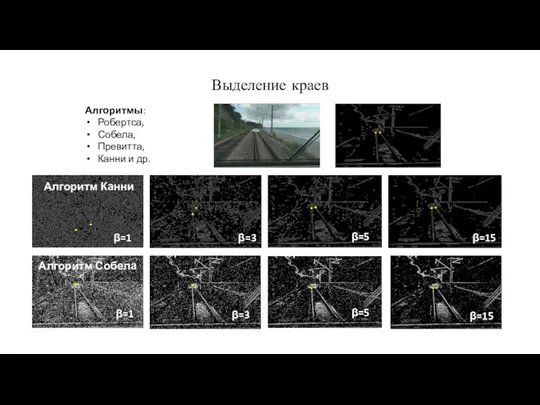
Выделение краев
Алгоритмы:
Робертса,
Собела,
Превитта,
Канни и др.
Выделение краев
Алгоритмы:
Робертса,
Собела,
Превитта,
Канни и др.
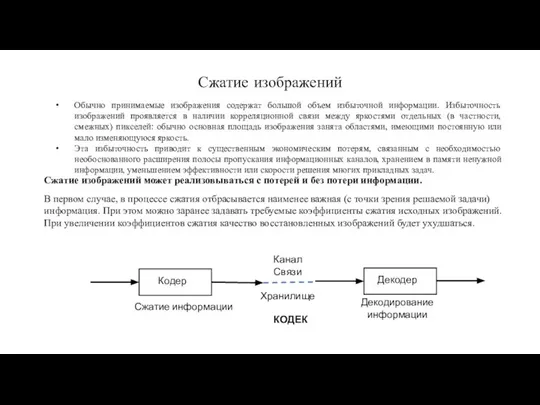
Сжатие изображений
Обычно принимаемые изображения содержат большой объем избыточной информации. Избыточность изображений
Сжатие изображений
Обычно принимаемые изображения содержат большой объем избыточной информации. Избыточность изображений

Дискретное косинусное преобразование (DCT)
Алгоритмы и стандарты:
- RLE, LZ, DCT, Хаффмана, вейвлет-
Дискретное косинусное преобразование (DCT)
Алгоритмы и стандарты:
- RLE, LZ, DCT, Хаффмана, вейвлет-
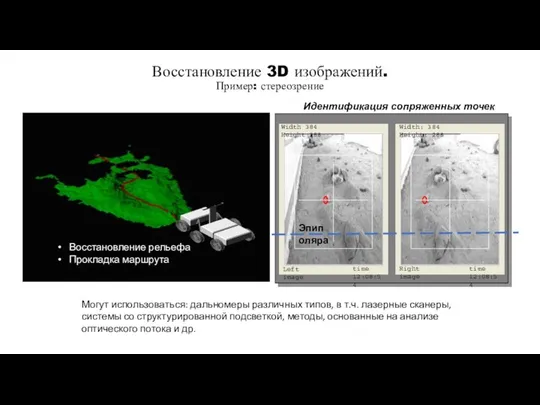
Восстановление 3D изображений.
Пример: стереозрение
Восстановление рельефа
Прокладка маршрута
Могут использоваться: дальномеры различных типов, в
Восстановление 3D изображений.
Пример: стереозрение
Восстановление рельефа
Прокладка маршрута
Могут использоваться: дальномеры различных типов, в

Дополненная и виртуальная реальность
Дополненная и виртуальная реальность
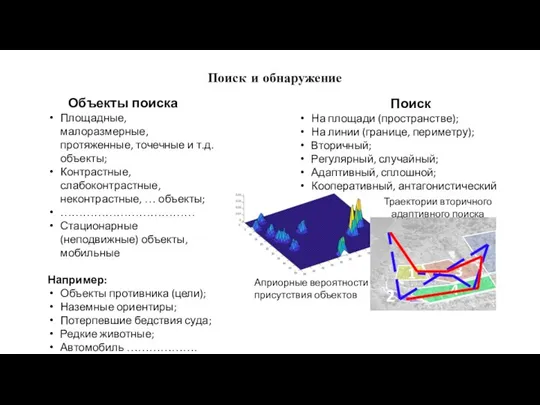
Поиск и обнаружение
Поиск и обнаружение
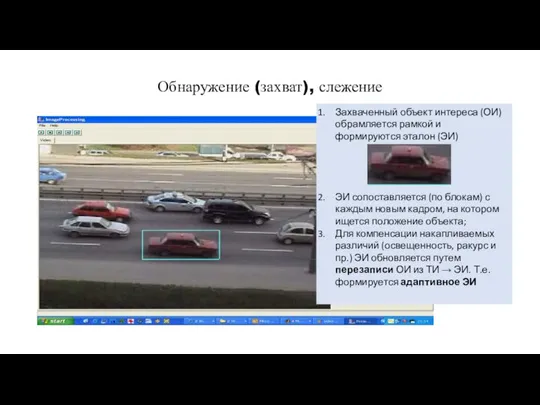
Обнаружение (захват), слежение
Обнаружение (захват), слежение
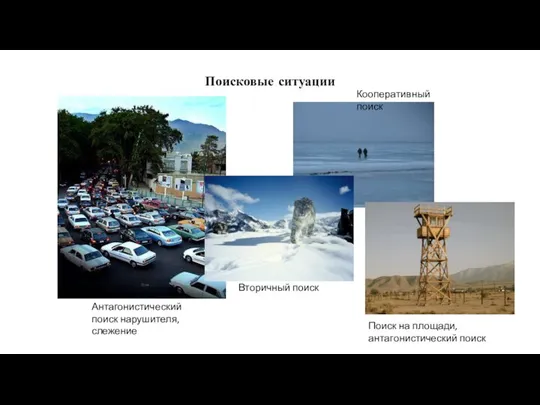
Поисковые ситуации
Кооперативный поиск
Поиск на площади,
антагонистический поиск
Вторичный поиск
Антагонистический поиск нарушителя, слежение
Поисковые ситуации
Кооперативный поиск
Поиск на площади,
антагонистический поиск
Вторичный поиск
Антагонистический поиск нарушителя, слежение
Распознавание
Распознавание лиц
Распознавание пород рыб
Распознавание предметов
Распознавание
Распознавание лиц
Распознавание пород рыб
Распознавание предметов

Анализ и прогноз ситуаций
(понимание ситуаций)
Что происходит?
Что произойдет?
Можно ли решить целевую задачу?
Какие
Анализ и прогноз ситуаций
(понимание ситуаций)
Что происходит?
Что произойдет?
Можно ли решить целевую задачу?
Какие
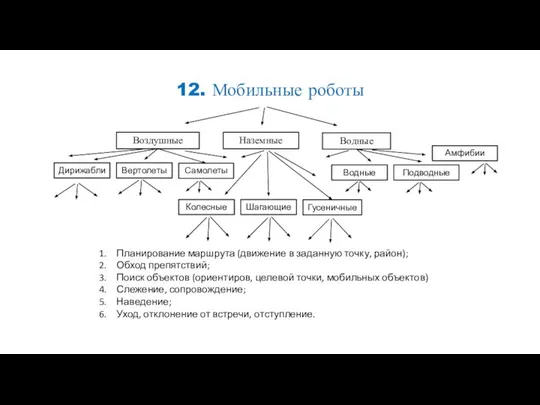
12. Мобильные роботы
Планирование маршрута (движение в заданную точку, район);
Обход препятствий;
Поиск объектов
12. Мобильные роботы
Планирование маршрута (движение в заданную точку, район);
Обход препятствий;
Поиск объектов

Организация движением МР
X, Y, Z
Организация движением МР
X, Y, Z
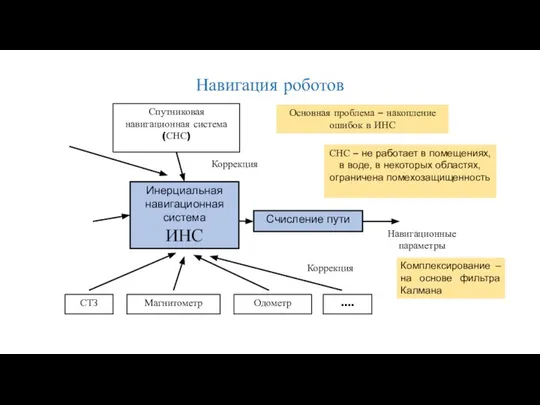
Навигация роботов
Основная проблема – накопление ошибок в ИНС
СНС – не работает
Навигация роботов
Основная проблема – накопление ошибок в ИНС
СНС – не работает

Система управления и навигации
на примере БЛА
ИНС
Система управления и навигации
на примере БЛА
ИНС
Задачи, решаемые БЛА (БПЛА)
Мониторинг;
Разведка (скрытность, маскировка, обход ПВО и пр.);
Транспорт;
Доставка
Задачи, решаемые БЛА (БПЛА)
Мониторинг;
Разведка (скрытность, маскировка, обход ПВО и пр.);
Транспорт;
Доставка

МОБИЛЬНАЯ ПЛАТФОРМА (МП)
Шагающие
Это изображение, автор: Неизвестный автор, лицензия: CC BY-SA
Различные показатели
МОБИЛЬНАЯ ПЛАТФОРМА (МП)
Шагающие
Это изображение, автор: Неизвестный автор, лицензия: CC BY-SA
Различные показатели
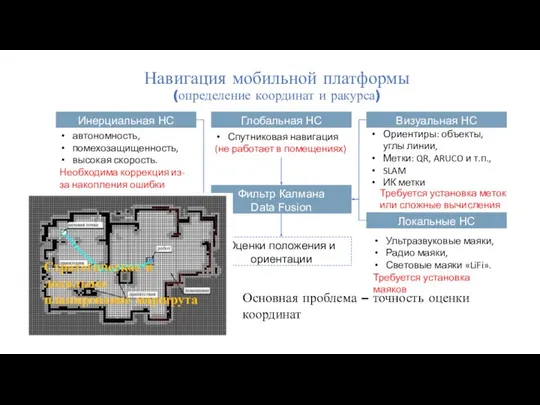
Навигация мобильной платформы
(определение координат и ракурса)
Стратегическое и
локальное
планирование маршрута
Основная проблема
Навигация мобильной платформы
(определение координат и ракурса)
Стратегическое и
локальное
планирование маршрута
Основная проблема

13, 14. Манипулятор
Разработка манипулятора с учётом грузоподъемности
Разработка схвата
Управление манипулятором
Очувствление манипулятора
13, 14. Манипулятор
Разработка манипулятора с учётом грузоподъемности
Разработка схвата
Управление манипулятором
Очувствление манипулятора
Манипуляторы
Основные понятия;
Классификация манипуляторов по управлению;
Кинематические схемы;
Степени подвижности. Движения;
Конструкции;
Коэффициент сервиса;
Построение системы координат.
Манипуляционным
Манипуляторы
Основные понятия;
Классификация манипуляторов по управлению;
Кинематические схемы;
Степени подвижности. Движения;
Конструкции;
Коэффициент сервиса;
Построение системы координат.
Манипуляционным

Число степеней подвижности манипулятора – сумма возможных координатных движений объекта манипулирования относительно
В зависимости от степени участия человека в управлении манипуляционные роботы подразделяются
В зависимости от степени участия человека в управлении манипуляционные роботы подразделяются
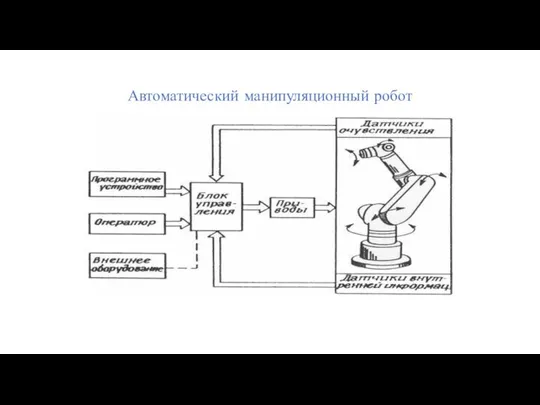
Автоматический манипуляционный робот
Автоматический манипуляционный робот
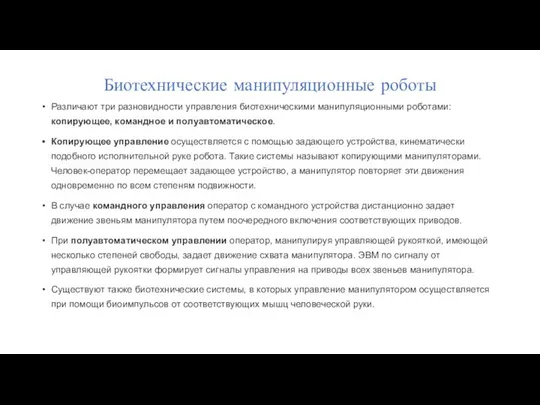
Биотехнические манипуляционные роботы
Различают три разновидности управления биотехническими манипуляционными роботами: копирующее,
Биотехнические манипуляционные роботы
Различают три разновидности управления биотехническими манипуляционными роботами: копирующее,
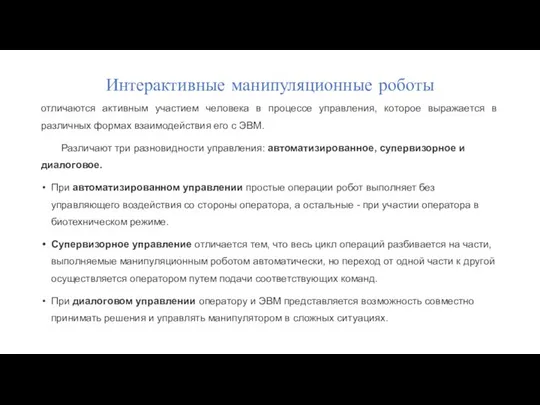
Интерактивные манипуляционные роботы
отличаются активным участием человека в процессе управления, которое
Интерактивные манипуляционные роботы
отличаются активным участием человека в процессе управления, которое
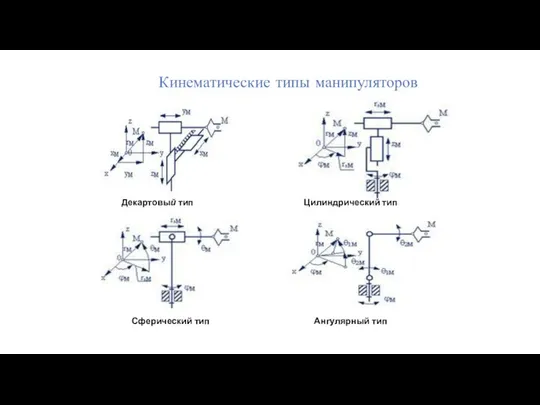
Кинематические типы манипуляторов
Декартовый тип Цилиндрический тип
Сферический тип Ангулярный тип
Кинематические типы манипуляторов
Декартовый тип Цилиндрический тип
Сферический тип Ангулярный тип
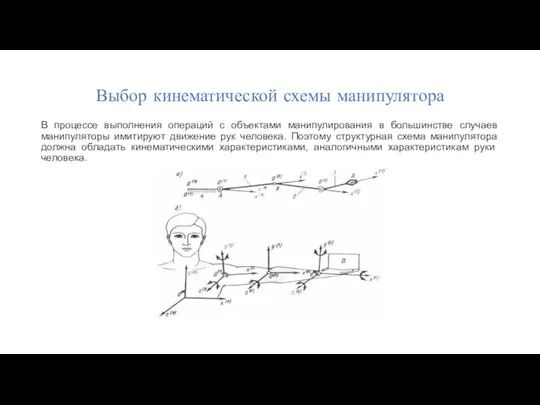
Выбор кинематической схемы манипулятора
В процессе выполнения операций с объектами манипулирования в
Выбор кинематической схемы манипулятора
В процессе выполнения операций с объектами манипулирования в
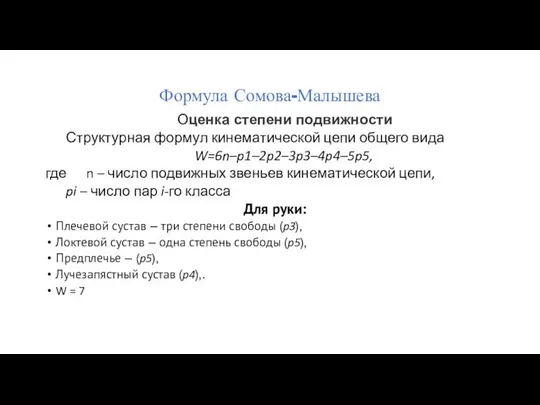
Формула Сомова-Малышева
Оценка степени подвижности
Структурная формул кинематической цепи общего вида
+W=6n–p1–2p2–3p3–4p4–5p5,
где n
Формула Сомова-Малышева
Оценка степени подвижности
Структурная формул кинематической цепи общего вида
+W=6n–p1–2p2–3p3–4p4–5p5,
где n
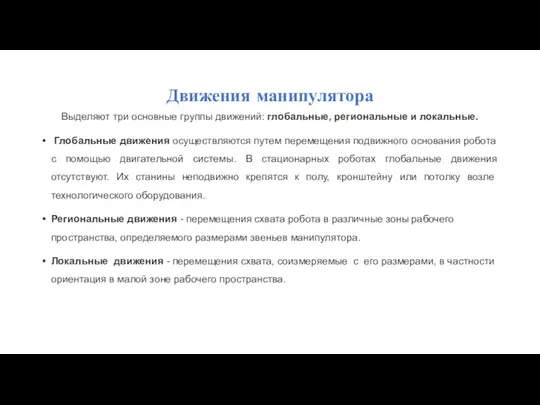
Движения манипулятора
Выделяют три основные группы движений: глобальные, региональные и локальные.
Глобальные
Движения манипулятора
Выделяют три основные группы движений: глобальные, региональные и локальные.
Глобальные

Конструкции манипуляторов
Максимальная точность
Конструкции манипуляторов
Максимальная точность
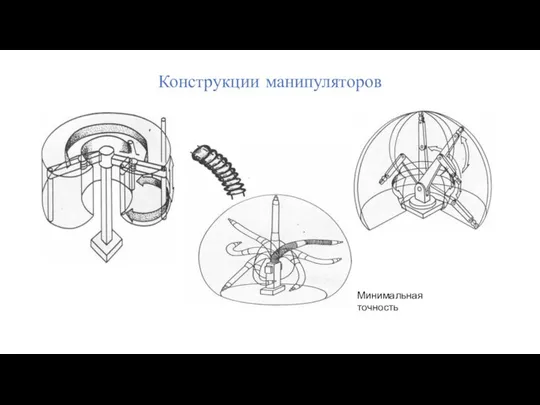
Конструкции манипуляторов
Минимальная точность
Конструкции манипуляторов
Минимальная точность
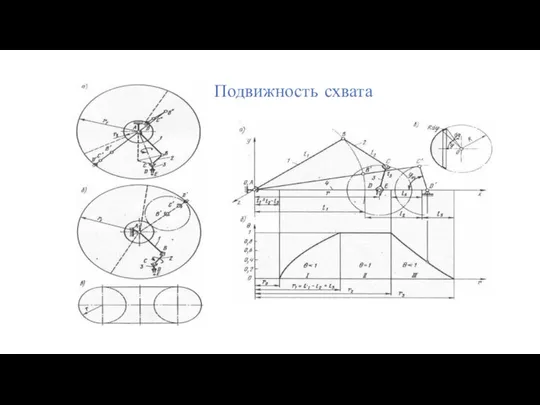
Подвижность схвата
Подвижность схвата
Коэффициент сервиса
Коэффициент сервиса
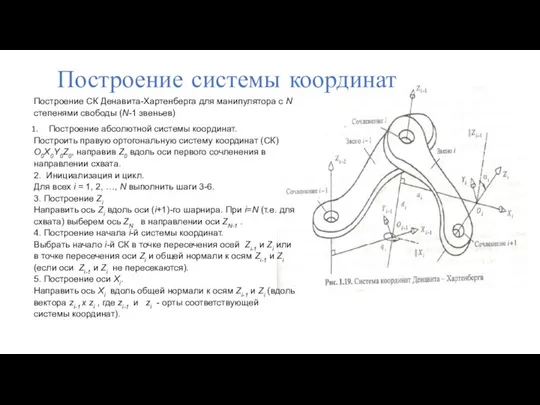
Построение системы координат
Построение СК Денавита-Хартенберга для манипулятора с N степенями свободы
Построение системы координат
Построение СК Денавита-Хартенберга для манипулятора с N степенями свободы
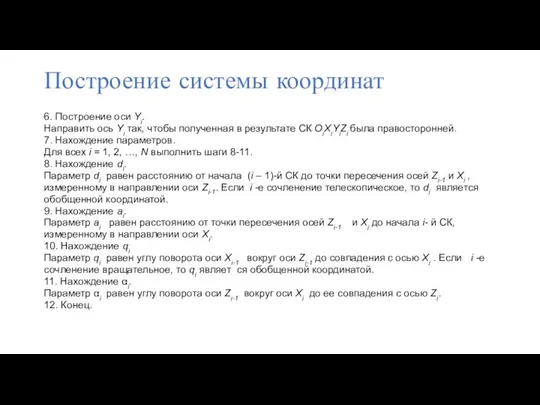
6. Построение оси Yi.
Направить ось Yi так, чтобы полученная в результате
6. Построение оси Yi.
Направить ось Yi так, чтобы полученная в результате
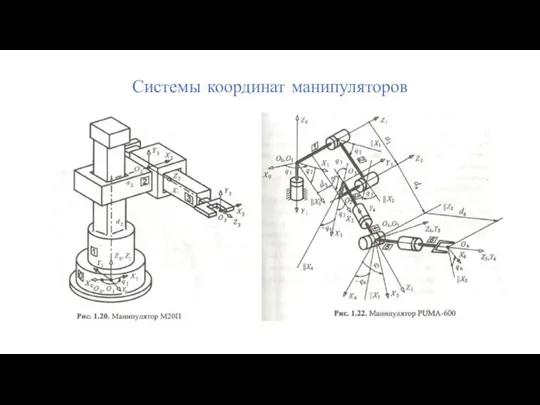
Системы координат манипуляторов
Системы координат манипуляторов
Управление манипуляторами
Однородные преобразования;
Прямая позиционная задача;
Обратная позиционная задача;
Выбор двигателя;
Захватные устройства.
Управление манипуляторами
Однородные преобразования;
Прямая позиционная задача;
Обратная позиционная задача;
Выбор двигателя;
Захватные устройства.
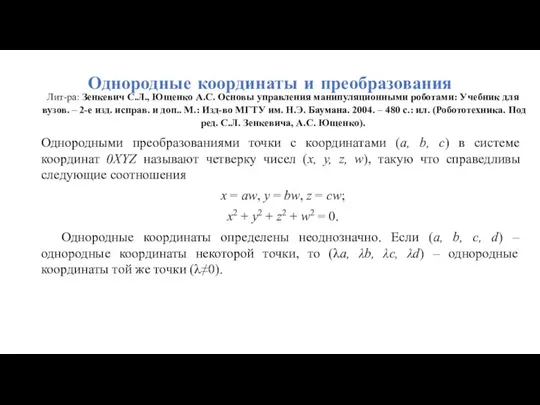
Однородные координаты и преобразования
Лит-ра: Зенкевич С.Л., Ющенко А.С. Основы управления манипуляционными
Однородные координаты и преобразования
Лит-ра: Зенкевич С.Л., Ющенко А.С. Основы управления манипуляционными
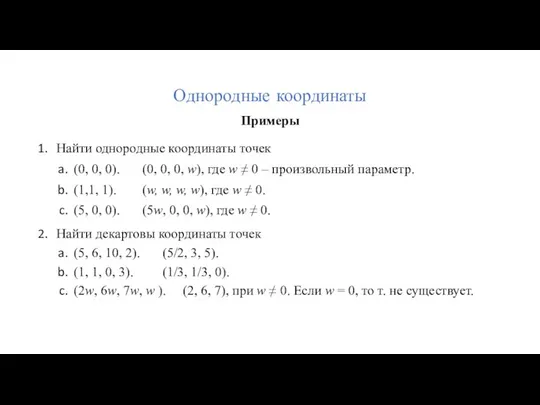
Однородные координаты
Примеры
Найти однородные координаты точек
(0, 0, 0). (0, 0, 0, w), где
Однородные координаты
Примеры
Найти однородные координаты точек
(0, 0, 0). (0, 0, 0, w), где
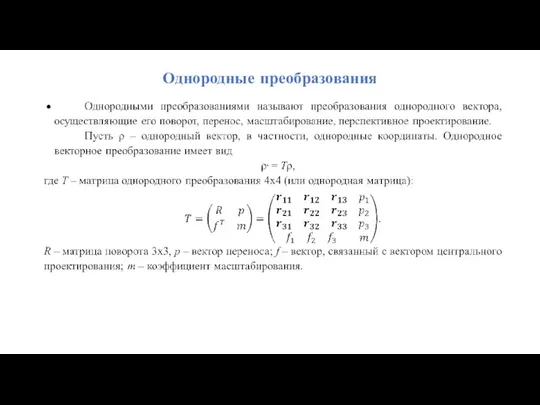
Однородные преобразования
Однородные преобразования
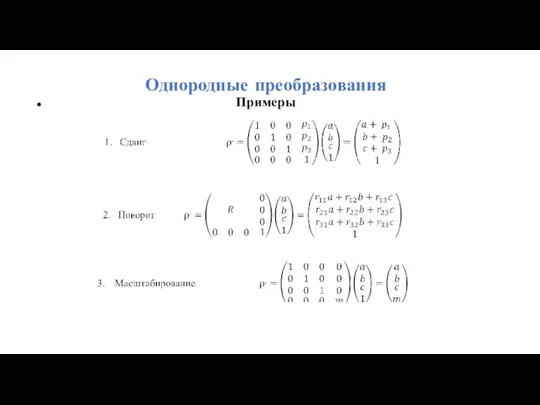
Однородные преобразования
Примеры
Однородные преобразования
Примеры
Однородные преобразования
Однородные преобразования
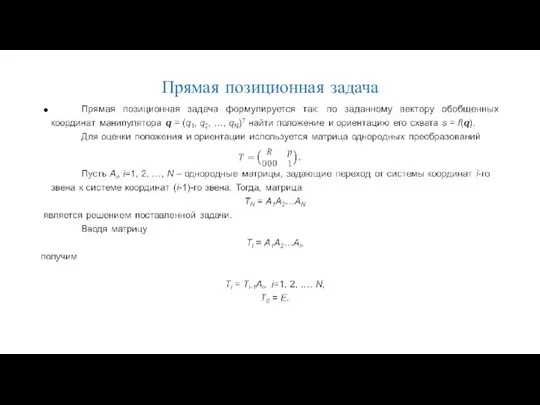
Прямая позиционная задача
Прямая позиционная задача
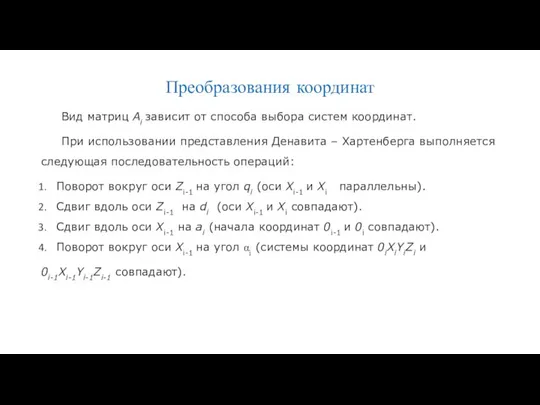
Преобразования координат
Вид матриц Ai зависит от способа выбора систем координат.
При использовании
Преобразования координат
Вид матриц Ai зависит от способа выбора систем координат.
При использовании
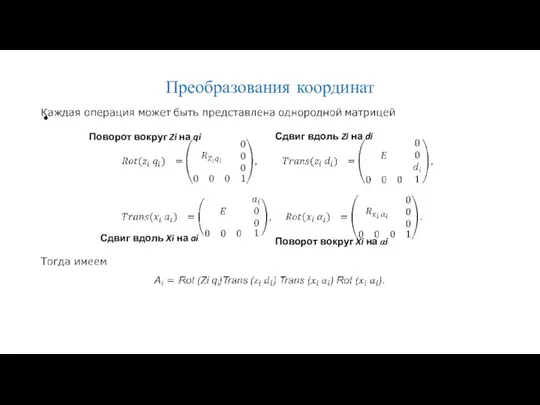
Преобразования координат
Поворот вокруг Zi на qi
Поворот вокруг Xi на αi
Сдвиг вдоль
Преобразования координат
Поворот вокруг Zi на qi
Поворот вокруг Xi на αi
Сдвиг вдоль
Прямая позиционная задача
Прямая позиционная задача
Решение прямой задачи
для двухзвенного плоского манипулятора
Матрицы перехода имеют вид
Матрицы Ti
Решение прямой задачи
для двухзвенного плоского манипулятора
Матрицы перехода имеют вид
Матрицы Ti
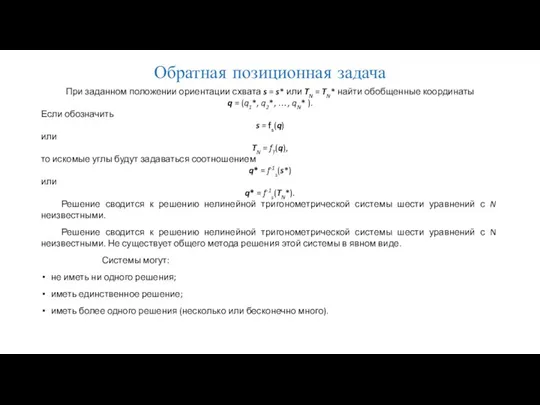
Обратная позиционная задача
При заданном положении ориентации схвата s = s* или
Обратная позиционная задача
При заданном положении ориентации схвата s = s* или
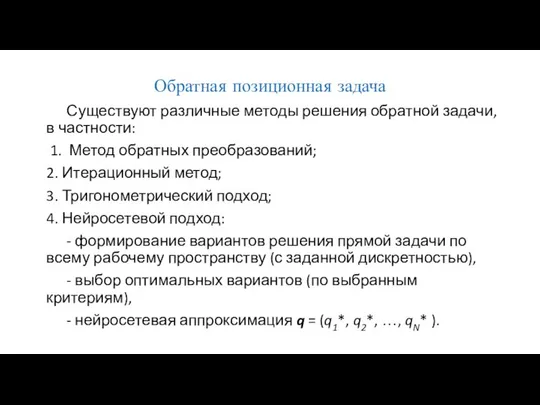
Существуют различные методы решения обратной задачи, в частности:
1. Метод обратных
Существуют различные методы решения обратной задачи, в частности:
1. Метод обратных
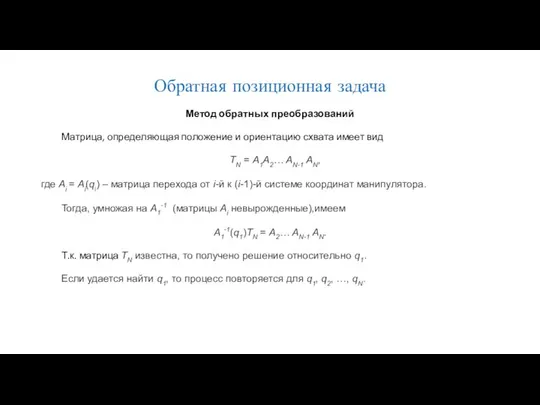
Метод обратных преобразований
Матрица, определяющая положение и ориентацию схвата имеет вид
TN =
Метод обратных преобразований
Матрица, определяющая положение и ориентацию схвата имеет вид
TN =
Обратная позиционная задача
Численные методы решения обратной задачи. Метод Ньютона
Рассматривается задача поиска
Обратная позиционная задача
Численные методы решения обратной задачи. Метод Ньютона
Рассматривается задача поиска
Выбор мощности приводов
для обеспечения требуемых движений манипулятора
Выбор мощности приводов
для обеспечения требуемых движений манипулятора
При выборе траектории необходимо, чтобы компоненты скорости vi не превышали (по
При выборе траектории необходимо, чтобы компоненты скорости vi не превышали (по
Выбор мощности приводов
для обеспечения требуемых движений манипулятора
Выбор мощности приводов
для обеспечения требуемых движений манипулятора
Линии 1, 2 на рисунке соответствуют механическим характеристикам двух различных электродвигателей.
Линии 1, 2 на рисунке соответствуют механическим характеристикам двух различных электродвигателей.
Методика выбора двигателя включает:
Определение требуемых компонент движения звеньев манипулятора;
Определение параметров нагрузки
Методика выбора двигателя включает:
Определение требуемых компонент движения звеньев манипулятора;
Определение параметров нагрузки
Захватные устройства
Захватные устройства (ЗУ) промышленных роботов (ПР) и манипуляторов (М) служат
Захватные устройства
Захватные устройства (ЗУ) промышленных роботов (ПР) и манипуляторов (М) служат
Классификация захватных устройств (ЗУ)
Различают ЗУ по принципу действия
Схватывающие ЗУ удерживают объект благодаря
Классификация захватных устройств (ЗУ)
Различают ЗУ по принципу действия
Схватывающие ЗУ удерживают объект благодаря
По характеру базирования захватные устройства делят на пять групп.
Способные к перебазированию
По характеру базирования захватные устройства делят на пять групп.
Способные к перебазированию
По виду управления ЗУ подразделяют на четыре группы
Неуправляемые ЗУ - пружинные механические
По виду управления ЗУ подразделяют на четыре группы
Неуправляемые ЗУ - пружинные механические

Неприводные ЗУ
Неприводные ЗУ со стопорными механизмами, обеспечивающими чередование циклов зажима и разжима
Неприводные ЗУ
Неприводные ЗУ со стопорными механизмами, обеспечивающими чередование циклов зажима и разжима

Широкодиапазонные механические ЗУ с рычажными передаточными механизмами и пневматическим приводом
Широкодиапазонные механические ЗУ с рычажными передаточными механизмами и пневматическим приводом
Широкодиапазонные центрирующие ЗУ с реечными передаточными механизмами для деталей типа тел
Широкодиапазонные центрирующие ЗУ с реечными передаточными механизмами для деталей типа тел
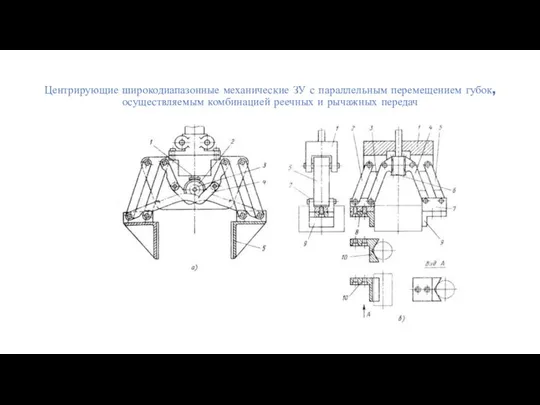
Центрирующие широкодиапазонные механические ЗУ с параллельным перемещением губок, осуществляемым комбинацией реечных
Центрирующие широкодиапазонные механические ЗУ с параллельным перемещением губок, осуществляемым комбинацией реечных

Элементы вакуумных и электромагнитных ЗУ
Элементы вакуумных и электромагнитных ЗУ
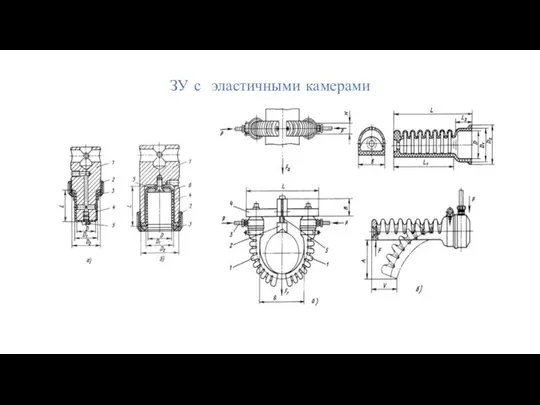
ЗУ с эластичными камерами
ЗУ с эластичными камерами
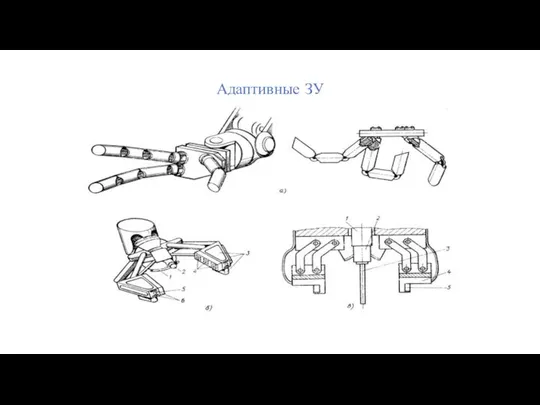
Адаптивные ЗУ
Адаптивные ЗУ
15. Человек - робот
Задачи
Выполнение роботом тяжелых, рутинных операций;
Помощь при выполнении сложных
15. Человек - робот
Задачи
Выполнение роботом тяжелых, рутинных операций;
Помощь при выполнении сложных
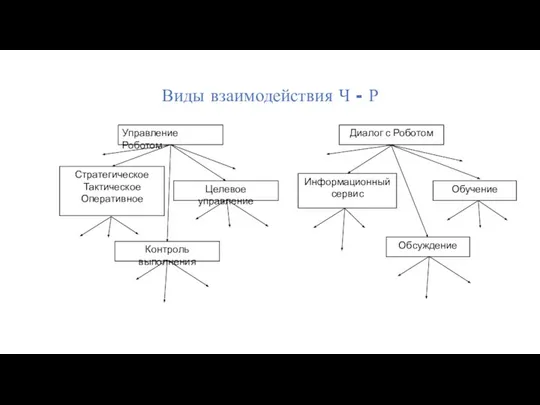
Виды взаимодействия Ч - Р
Виды взаимодействия Ч - Р
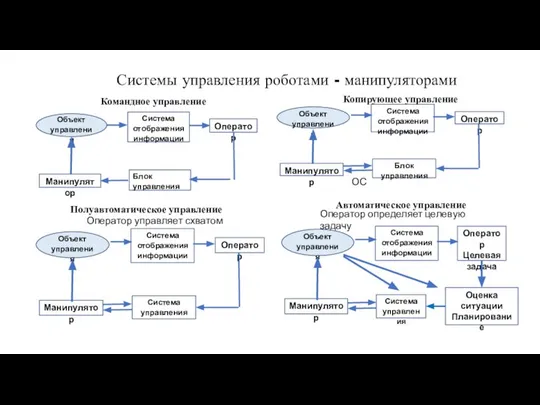
Системы управления роботами - манипуляторами
Системы управления роботами - манипуляторами
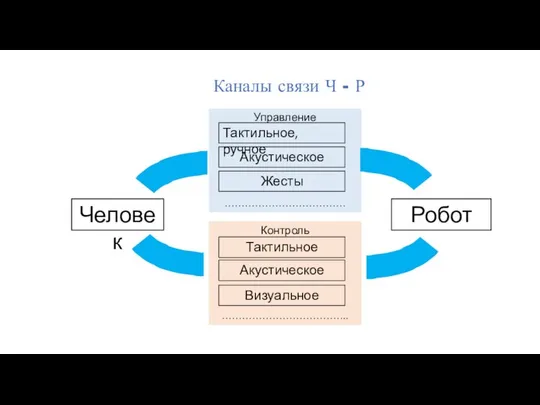
Каналы связи Ч - Р
Каналы связи Ч - Р
Инженерная психология
Комплексы, объединяющие работу ТС (в т.ч. роботов) и человека, называются
Инженерная психология
Комплексы, объединяющие работу ТС (в т.ч. роботов) и человека, называются
Проектирование СЧМ
Эффективность работы СЧМ зависит от согласованности действий человека -
Проектирование СЧМ
Эффективность работы СЧМ зависит от согласованности действий человека -
Структура СЧМ
Информация о состоянии объекта управления (ОУ), например, манипулятора, выдается устройством
Структура СЧМ
Информация о состоянии объекта управления (ОУ), например, манипулятора, выдается устройством
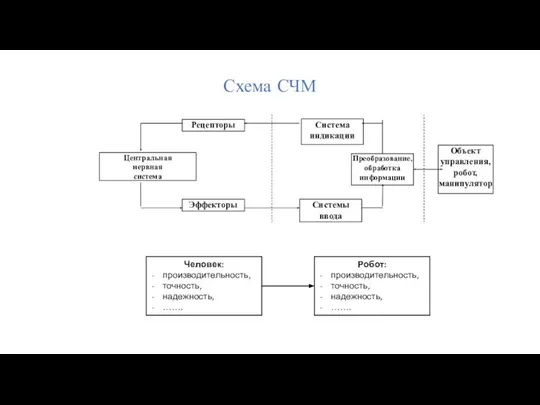
Схема СЧМ
Человек:
производительность,
точность,
надежность,
…….
Робот:
производительность,
точность,
надежность,
…….
Схема СЧМ
Человек:
производительность,
точность,
надежность,
…….
Робот:
производительность,
точность,
надежность,
…….
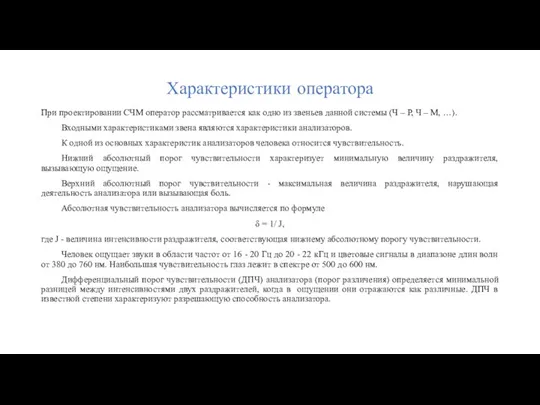
Характеристики оператора
При проектировании СЧМ оператор рассматривается как одно из звеньев данной
Характеристики оператора
При проектировании СЧМ оператор рассматривается как одно из звеньев данной
Основными характеристиками человека-оператора являются: быстродействие и пропускная способность оператора, определяющие его
Основными характеристиками человека-оператора являются: быстродействие и пропускная способность оператора, определяющие его

Если оператору предъявляется один из n заранее известных сигналов и он
Если оператору предъявляется один из n заранее известных сигналов и он
Динамические модели оператора
Динамические модели оператора
Точность работы оператора
Точность определяет степень соответствия выполнения опреатором определенных функций
Точность работы оператора
Точность определяет степень соответствия выполнения опреатором определенных функций
Надежность оператора
Надежность оператора - это способность выполнять в полном объеме возложенные
Надежность оператора
Надежность оператора - это способность выполнять в полном объеме возложенные
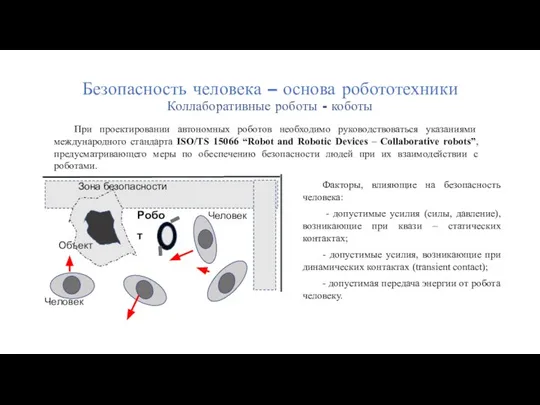
Безопасность человека – основа робототехники
Коллаборативные роботы - коботы
Факторы, влияющие на безопасность
Безопасность человека – основа робототехники
Коллаборативные роботы - коботы
Факторы, влияющие на безопасность
 20160131_politika_moskovskoy_rusi_na_severnom_kavkaze
20160131_politika_moskovskoy_rusi_na_severnom_kavkaze Световое решение эстакады на пересечении улиц Чистопольская-Амирхана
Световое решение эстакады на пересечении улиц Чистопольская-Амирхана Cпособы первичного вскрытия продуктивных пластов
Cпособы первичного вскрытия продуктивных пластов ДОКЛАД МИНИСТРА 19 АВГУСТА
ДОКЛАД МИНИСТРА 19 АВГУСТА Храм.(часть 1)
Храм.(часть 1) 00.Sissejuhatus+füüsikasse
00.Sissejuhatus+füüsikasse Очередная безумная идея
Очередная безумная идея ЗДОРОВЫЙ ОБРАЗ ЖИЗНИ
ЗДОРОВЫЙ ОБРАЗ ЖИЗНИ Развитие станкостроения
Развитие станкостроения Органолептичні методи оцінки якості харчової продукції. (Тема 2)
Органолептичні методи оцінки якості харчової продукції. (Тема 2) Формируем отношение к проблемам: препятствие или побуждение к действию?
Формируем отношение к проблемам: препятствие или побуждение к действию? королева
королева Лексическая типология
Лексическая типология Учет и аудит расчетов с бюджетом в ООО Спецтранс-82
Учет и аудит расчетов с бюджетом в ООО Спецтранс-82 Поведенческая стратегия и тактика. Вербальные способы общения
Поведенческая стратегия и тактика. Вербальные способы общения Технологический процесс работы участковой железнодорожной станции
Технологический процесс работы участковой железнодорожной станции Контроль и сортировка деталей при ремонте
Контроль и сортировка деталей при ремонте d85930defc008f6e25cab28bdb56 (1)
d85930defc008f6e25cab28bdb56 (1)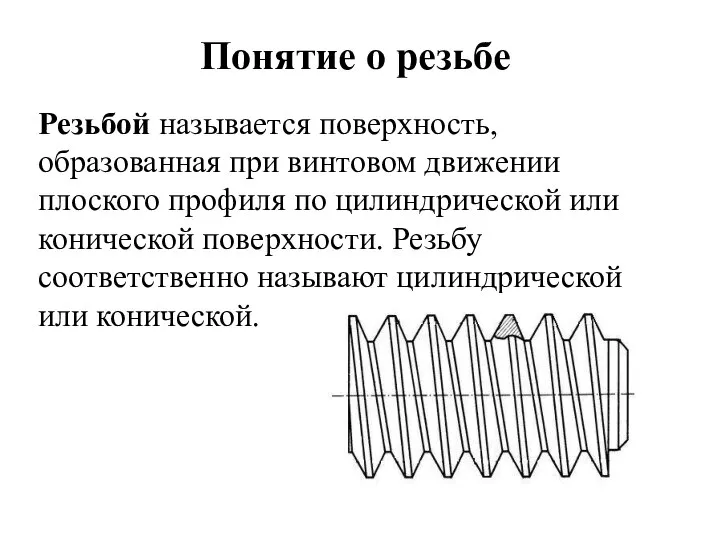 Понятие о резьбе
Понятие о резьбе Современные технологические смазки для процессов горячей деформации в производстве бесшовных труб
Современные технологические смазки для процессов горячей деформации в производстве бесшовных труб Эко день в библиотеке
Эко день в библиотеке internet-zhurnalistika
internet-zhurnalistika Семь чудес Сургутского района. Автомобильный вантовый мост через Обь
Семь чудес Сургутского района. Автомобильный вантовый мост через Обь Области профессиональной деятельности и профессиональные компетенции обучающихся (2 часа)
Области профессиональной деятельности и профессиональные компетенции обучающихся (2 часа) Всероссийского конкурса Моя малая родина: природа, культура, этнос
Всероссийского конкурса Моя малая родина: природа, культура, этнос Физики шутят
Физики шутят 20130109_cygany_kak_romanticheskaya_poema
20130109_cygany_kak_romanticheskaya_poema поделка из макарон бусы
поделка из макарон бусы