- Разработка комплекта дистанционного управления транспортным средством высокой проходимости

Содержание
- 2. Эксплуатация транспортных средств высокой проходимости Транспортные средства высокой проходимости используются преимущественно в регионах с наиболее экстремальными
- 3. Система дистанционного управления Система рулевого управления Система управления трансмиссией Система управления зажиганием Система управления дросселем Управление
- 4. Цель и задачи Целью исследования является повышение эффективности эксплуатации вездехода путем внедрения системы дистанционного управления (ДУ)
- 5. Научная новизна и практическая значимость Научная новизна исследования заключается в определении закономерностей влияния природно-климатических факторов и
- 6. Устройство трансмисии Снегоболотоход «Пелец Cruiser 640» оборудован бесступенчатым вариатором и механической трёхвальной 5-ступенчатой коробкой переключения передач
- 7. Добавить слайд с конструкцией системы рулевого управления Почему то ты про нее незаслуженно забыл
- 8. Технические характеристики системы дистанционного управления приводом КПП и системы рулевого управления Электрическое питание ЭПП осуществляется от
- 9. Конструкция электропневматического привода Устройство ИМКП представлено сборкой из пружин, пневмоцилиндров и элементов их крепления. Для обеспечения
- 10. Включение/выключение передач выполняют двухштоковые пневмоцилиндры (ПцВ) (5), установленные в корпус (4). Передача движения от цилиндров на
- 11. Блок управления БУ построен на базе платы Arduino UNO, которая осуществляет управление всей системой. Помимо него
- 12. Устройство пневмосистемы (БКС) В разработанной системе ЭПП используются пяти линейные трех позиционные пневмораспределители (5-8) с открытым
- 13. Алгоритм работы Программа построена таким образом, чтобы обеспечить максимальное количество возможных действий, при минимальном наборе внутренних
- 15. Скачать презентацию

Эксплуатация транспортных средств высокой проходимости
Транспортные средства высокой проходимости используются преимущественно в
Эксплуатация транспортных средств высокой проходимости
Транспортные средства высокой проходимости используются преимущественно в
Система дистанционного управления
Система рулевого управления
Система управления трансмиссией
Система управления зажиганием
Система
Система дистанционного управления
Система рулевого управления
Система управления трансмиссией
Система управления зажиганием
Система
Цель и задачи
Целью исследования является повышение эффективности эксплуатации вездехода путем внедрения
Цель и задачи
Целью исследования является повышение эффективности эксплуатации вездехода путем внедрения
Научная новизна и практическая значимость
Научная новизна исследования заключается в определении закономерностей
Научная новизна и практическая значимость
Научная новизна исследования заключается в определении закономерностей
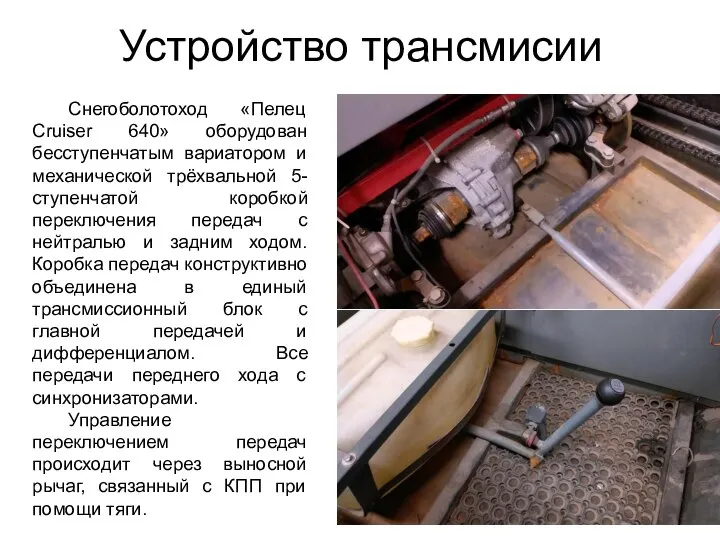
Устройство трансмисии
Снегоболотоход «Пелец Cruiser 640» оборудован бесступенчатым вариатором и механической трёхвальной
Устройство трансмисии
Снегоболотоход «Пелец Cruiser 640» оборудован бесступенчатым вариатором и механической трёхвальной
Добавить слайд с конструкцией системы рулевого управления
Почему то ты про нее
Добавить слайд с конструкцией системы рулевого управления
Почему то ты про нее
Технические характеристики системы дистанционного управления приводом КПП и системы рулевого управления
Электрическое
Технические характеристики системы дистанционного управления приводом КПП и системы рулевого управления
Электрическое

Конструкция электропневматического привода
Устройство ИМКП представлено сборкой из пружин, пневмоцилиндров и
Конструкция электропневматического привода
Устройство ИМКП представлено сборкой из пружин, пневмоцилиндров и

Включение/выключение передач выполняют двухштоковые пневмоцилиндры (ПцВ) (5), установленные в корпус (4).
Включение/выключение передач выполняют двухштоковые пневмоцилиндры (ПцВ) (5), установленные в корпус (4).
Блок управления
БУ построен на базе платы Arduino UNO, которая осуществляет управление
Блок управления
БУ построен на базе платы Arduino UNO, которая осуществляет управление
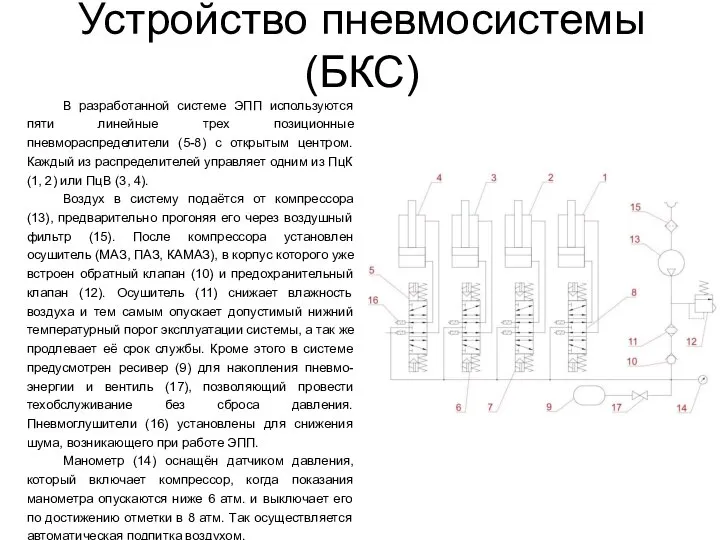
Устройство пневмосистемы (БКС)
В разработанной системе ЭПП используются пяти линейные трех позиционные
Устройство пневмосистемы (БКС)
В разработанной системе ЭПП используются пяти линейные трех позиционные
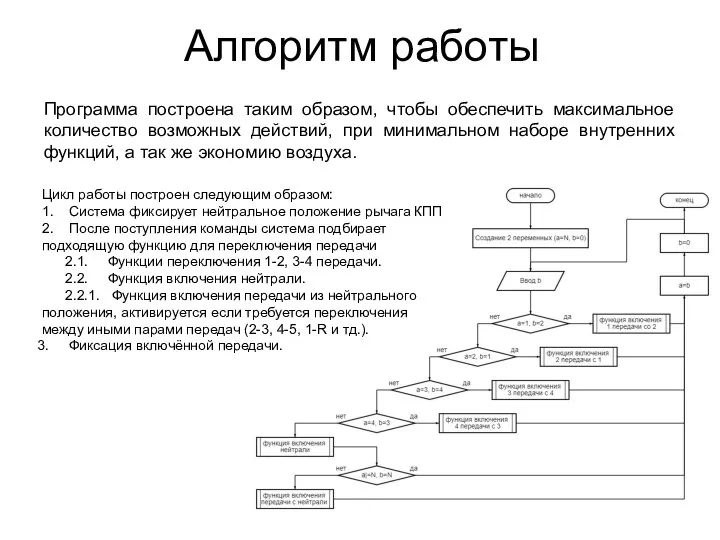
Алгоритм работы
Программа построена таким образом, чтобы обеспечить максимальное количество возможных действий,
Алгоритм работы
Программа построена таким образом, чтобы обеспечить максимальное количество возможных действий,
 Виды терминалов и доп информация (8)
Виды терминалов и доп информация (8) Лекция №1 Леч.дело, Сестр.дело_новая
Лекция №1 Леч.дело, Сестр.дело_новая События, обусловившие утрату чувства собственного достоинства
События, обусловившие утрату чувства собственного достоинства Как устроены платежные карты
Как устроены платежные карты Дизайн среды
Дизайн среды 20111101_proekt_uchitelya
20111101_proekt_uchitelya Отделка и дефекты ткани
Отделка и дефекты ткани Искусство жить в любви
Искусство жить в любви Богословское обоснование трезвенного движения
Богословское обоснование трезвенного движения Что такое натуральные ткани. Каковы их свойства
Что такое натуральные ткани. Каковы их свойства санын қосу және азайту.pptx
санын қосу және азайту.pptx Unterlagen_2_slides
Unterlagen_2_slides Социология религии. Виды религий
Социология религии. Виды религий Синтетические материалы
Синтетические материалы Организация ТО и ремонта на универсальных и специализированных постах
Организация ТО и ремонта на универсальных и специализированных постах Бесплатный_шаблон_презентаций_15
Бесплатный_шаблон_презентаций_15 Рис 2
Рис 2 “Разработка плана площадки для выгула собак”
“Разработка плана площадки для выгула собак” ПД_черты_характера
ПД_черты_характера Лекция_10_Геологическая служба
Лекция_10_Геологическая служба Набивные печатные ткани
Набивные печатные ткани Значение цвета пояса в каратэ
Значение цвета пояса в каратэ Разработка интернет-магазина для фотографа
Разработка интернет-магазина для фотографа Dispatch
Dispatch Ұңғыны пайдалану. Фонтанды. Газлифті. Сорапты
Ұңғыны пайдалану. Фонтанды. Газлифті. Сорапты Проектирование и моделирование мехатронных и робототехнических систем
Проектирование и моделирование мехатронных и робототехнических систем Презентация Весна PowerPoint
Презентация Весна PowerPoint Технологические процессы и применяемое оборудование в резиносмешении
Технологические процессы и применяемое оборудование в резиносмешении