- Введение в профильную подготовку Кафедра СМ-11 Подводные роботы и аппараты

Содержание
- 2. Изучаемые дисциплины
- 3. Мехатроника. Основные понятия Мехатроника — это область науки и техники, основанная на синергетическом объединении узлов точной
- 4. Объект движения (объект управления) Структурная схема исполнительной системы Механическая передача Двигатель Электронный силовой модуль управления Измерители
- 5. Основные особенности традиционного проектирования исполнительной системы последовательная схема проектирования; разработка проводится группой узкоспециализированных специалистов; использование стандартных
- 6. Исполнительная система в виде мехатронного модуля Мехатронный модуль — это функционально и конструктивно самостоятельное изделие для
- 7. Конструктивная схема мехатронного модуля движения
- 8. Основные особенности мехатронной исполнительной системы параллельная схема проектирования; разработка проводится специалистами в области мехатронных систем; абсолютная
- 9. Для мехатроники характерно стремление к полной интеграции механических узлов, электрических машин, силовой электроники, программируемых контроллеров.
- 10. Робототехника. Основные понятия Робототехника (от робот (от робот и техника (от робот и техника; англ. robotics
- 11. Робот (robot, от robota — «подневольный труд»)— автоматическое устройство, созданное по принципу живого организма, предназначенное для
- 12. Основные типы роботов Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в
- 13. Обобщенная структурная схема робота Информационно-управляющая система Полезная нагрузка Исполнительные системы (мехатронные модули) Информационные (сенсорные) системы Бортовой
- 14. Кафедра «Автоматические приводы» М-7 1985 г. Образование кафедры «Промышленные робототехнические системы». Сейчас «Робототехнические системы» РК-10 1987
- 15. Изучаемые дисциплины
- 16. Учебная подготовка
- 18. Скачать презентацию
Изучаемые дисциплины
Изучаемые дисциплины
Мехатроника.
Основные понятия
Мехатроника — это область науки и техники, основанная на синергетическом
Мехатроника.
Основные понятия
Мехатроника — это область науки и техники, основанная на синергетическом
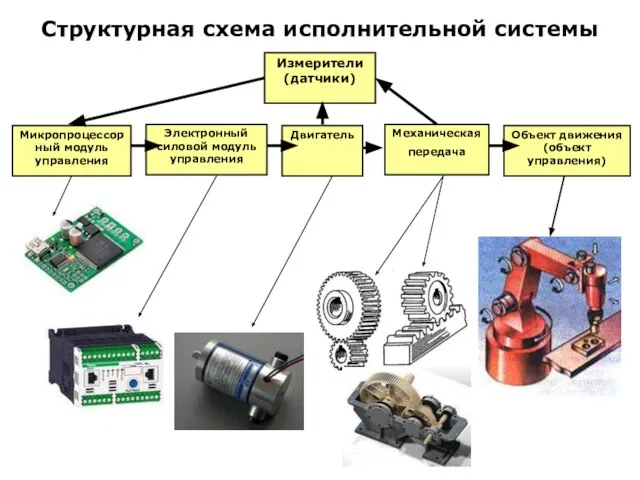
Объект движения (объект управления)
Структурная схема исполнительной системы
Механическая
передача
Двигатель
Электронный силовой модуль управления
Измерители
Объект движения (объект управления)
Структурная схема исполнительной системы
Механическая
передача
Двигатель
Электронный силовой модуль управления
Измерители
Основные особенности традиционного проектирования исполнительной системы
последовательная схема проектирования;
разработка проводится группой узкоспециализированных
Основные особенности традиционного проектирования исполнительной системы
последовательная схема проектирования;
разработка проводится группой узкоспециализированных

Исполнительная система в виде мехатронного модуля
Мехатронный модуль — это функционально и
Исполнительная система в виде мехатронного модуля
Мехатронный модуль — это функционально и

Конструктивная схема мехатронного модуля движения
Конструктивная схема мехатронного модуля движения
Основные особенности
мехатронной исполнительной системы
параллельная схема проектирования;
разработка проводится специалистами в области
Основные особенности
мехатронной исполнительной системы
параллельная схема проектирования;
разработка проводится специалистами в области

Для мехатроники характерно стремление к полной интеграции механических узлов, электрических машин,
Для мехатроники характерно стремление к полной интеграции механических узлов, электрических машин,
Робототехника.
Основные понятия
Робототехника (от робот (от робот и техника (от робот и
Робототехника.
Основные понятия
Робототехника (от робот (от робот и техника (от робот и
Робот (robot, от robota — «подневольный труд»)— автоматическое устройство, созданное по принципу
Робот (robot, от robota — «подневольный труд»)— автоматическое устройство, созданное по принципу

Основные типы роботов
Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая
Основные типы роботов
Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая

Обобщенная структурная схема робота
Информационно-управляющая система
Полезная нагрузка
Исполнительные системы
(мехатронные модули)
Информационные
(сенсорные)
Обобщенная структурная схема робота
Информационно-управляющая система
Полезная нагрузка
Исполнительные системы
(мехатронные модули)
Информационные
(сенсорные)
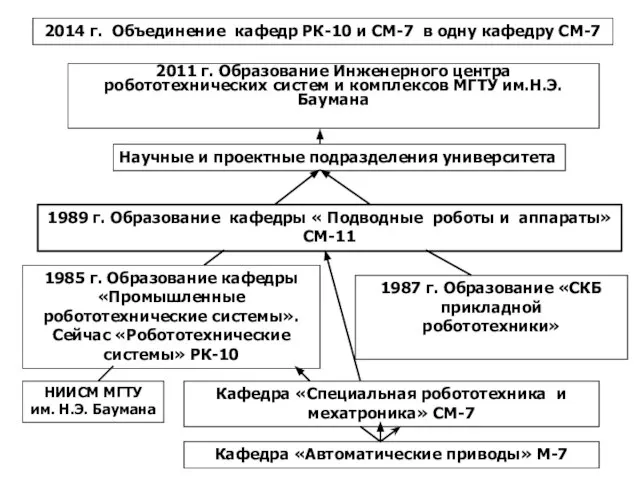
Кафедра «Автоматические приводы» М-7
1985 г. Образование кафедры
«Промышленные робототехнические системы». Сейчас
Кафедра «Автоматические приводы» М-7
1985 г. Образование кафедры
«Промышленные робототехнические системы». Сейчас
Изучаемые дисциплины
Изучаемые дисциплины
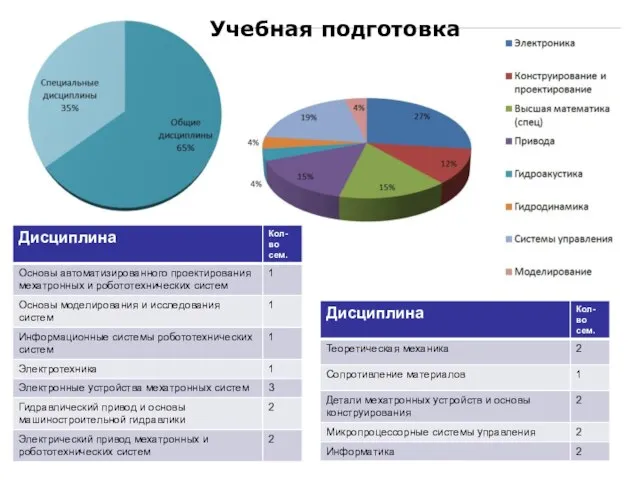
Учебная подготовка
Учебная подготовка
 Avtotransformatorlar.Onların işinin təhlili və tətbiq sahələri Fakultə:Hava Nəqliyyatı. Fənn: Elektrik maşınları 2
Avtotransformatorlar.Onların işinin təhlili və tətbiq sahələri Fakultə:Hava Nəqliyyatı. Fənn: Elektrik maşınları 2 Праздничный пир в теремных палатах
Праздничный пир в теремных палатах Отчёт по производственной практике Основы аналитической химии и физико-химических методов анализа
Отчёт по производственной практике Основы аналитической химии и физико-химических методов анализа Основные принципы фармакологии
Основные принципы фармакологии Основні види палива та їх роль в енергетиці країни
Основні види палива та їх роль в енергетиці країни Клапан токоприемника КП-17-09А
Клапан токоприемника КП-17-09А Наши любимые учителя
Наши любимые учителя Проектирование электроснабжения и выбор электрооборудования прессового участка механического завода
Проектирование электроснабжения и выбор электрооборудования прессового участка механического завода Афиша. Праздничная программа Мужской разговор
Афиша. Праздничная программа Мужской разговор Огонь в истории человечества
Огонь в истории человечества Обоснование методики аэрологической оценки метаноопасности при проведении подготовительных выработок на шахтах Вьетнама
Обоснование методики аэрологической оценки метаноопасности при проведении подготовительных выработок на шахтах Вьетнама 20150228_kompyuternyy_praktikum_dlya_logopeda_-_chast_2
20150228_kompyuternyy_praktikum_dlya_logopeda_-_chast_2 Набор корпуса судна
Набор корпуса судна С новым 2016 годом! РДС строй
С новым 2016 годом! РДС строй Стоглавый собор — церковный и земский собор
Стоглавый собор — церковный и земский собор konferentsia_po_tekhne
konferentsia_po_tekhne Обобщение знаний о написании слов с орфограммами
Обобщение знаний о написании слов с орфограммами Что растёт на клумбе
Что растёт на клумбе Энергосберегающие технологии при производстве извести
Энергосберегающие технологии при производстве извести doclad
doclad Индивидуальный проект. Исследование как элемент проекта и как тип деятельности
Индивидуальный проект. Исследование как элемент проекта и как тип деятельности 20171207_prezentatsiya1_0
20171207_prezentatsiya1_0 Степенная функция её свойства и график
Степенная функция её свойства и график Общие сведения об аэродромных топливозаправщиках
Общие сведения об аэродромных топливозаправщиках 20171028_basnya_kak_zhanr
20171028_basnya_kak_zhanr Семинар для педагогов Система работы с родителями
Семинар для педагогов Система работы с родителями Конструирование и моделирование брюк
Конструирование и моделирование брюк Автоматизация производства в легкой промышленности
Автоматизация производства в легкой промышленности