- Методы создания съемочных сетей

Содержание
- 2. Выражение (5) можно упростить (6) Особенность уравнений поправок в том, что число их меньше числа неизвестных
- 3. Рассмотрим решение задачи по определению поправок для случая равноточных измерений в соответствии с принципом [v2] =
- 4. (7) Составим функцию путем прибавления к [v2] левых частей уравнения (6), умножив каждое на неопределенный множитель
- 5. Для нахождения минимума функции (7) находят частные производные и приравнивают к нулю. В результате получим n
- 6. Отсюда получим уравнения поправок (8) Неопределенные множители k1, k2, …, kr называются коррелатами. Чтобы по этим
- 7. Подставляя выражения из (8) в услов-ные уравнения (5) для первого уравнения получим а1а1k1+a1b1k2+…+a1r1kr+ а2а2k1+a2b2k2+…+a2r2kr+ +………+ +аnаnk1+anbnk2+…+anrnkr+w1=0,
- 8. Делая аналогичную подстановку в остальные уравнения системы (5), получим систему нормальных урав-нений коррелат в следующем виде
- 9. Коэффициенты [aa], [bb], …., [rr], распо-ложенные на главной диагонали, всегда положительны и называются квадратич-ными. Неквадратичные коэффициенты,
- 10. Для неравноточных измерений уравне-ния поправок имеют вид (10)
- 11. Нормальные уравнения коррелат будут такими (11) В этих выражениях q – величина обратная весу измерения Вывод
- 12. 2. Понятие о параметрическом способе уравнивания. Пусть измерено n величин. Получены значения l/1, l/2, …, l/n
- 13. Между уравненным значением измеренной величины и искомыми неизвестными всегда можно найти связывающую их функцию (12)
- 14. К примеру, в треугольнике измерены все три угла α, β и γ. Выберем в качестве необходимых
- 15. Запишем (12) в таком виде (13) Найдем x, y, …, w при условии [pv2] = min.
- 16. Для этого представим уравненные значения неизвестных в следующем виде х = х0+δх, y = y0+δy, (14)
- 17. При разложении (13) в ряд получим Введем обозначения:
- 18. С учетом их запишем (15) Уравнение (15) называют парамет-рическим уравнением поправок. Частные производные ai, bi, …
- 19. Исходя из принципа наименьших квадратов u = [pv2] = min, найдем частные производные и приравняем их
- 20. (16)
- 21. В этой системе число уравнений равно числу неизвестных. Решив ее, найдем поправки к приближенным значениям параметров.
- 22. Тема «Методы создания съемочных сетей» Теодолитные ходы. Микротриангуляция. Четырехугольники без диагоналей проф. Зубрицкого И.В. Полярно-лучевой метод.
- 23. 1. Теодолитные ходы. При создании съемочных сетей, в частности, для целей землеустройства, широко применяются теодолитные ходы.
- 24. Если необходимо выполнить съемку какого-то землепользования, то основной теодолитный ход прокладывается по его границе. Внутри прокладываются
- 25. Предельные угловые невязки опреде-ляются по формуле где n – число углов в ходе (полигоне). Стороны теодолитных
- 26. Теодолитные ходы в зависимости от условий местности прокладываются с предельными относительными погреш-ностями 1:3000, 1:2000, 1:1000. Допустимые
- 27. 2. Микротриангуляция. В условиях открытой и всхолмленной местности съемочные сети взамен теодолитных ходов могут развиваться методами
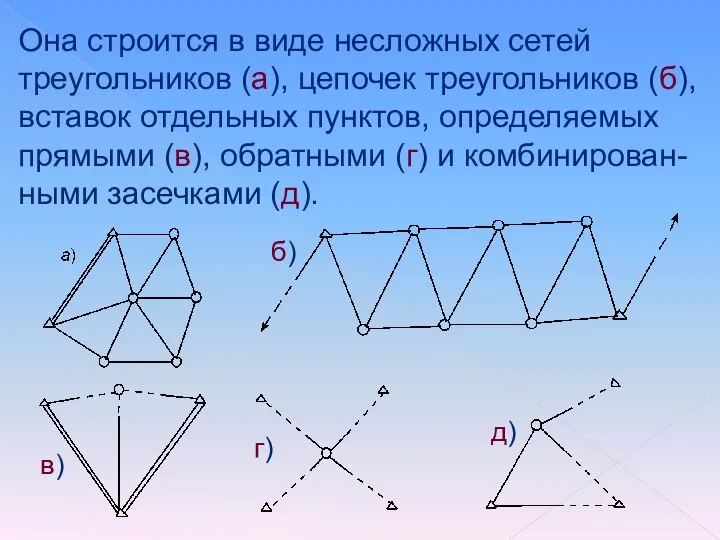
- 28. Она строится в виде несложных сетей треугольников (а), цепочек треугольников (б), вставок отдельных пунктов, определяемых прямыми
- 29. В качестве исходных сторон используется стороны триангуляции или полигонометрии 1 и 2 разрядов, а также специально
- 30. Определение точек прямой засечкой производится не менее чем с трех пунктов, при этом углы засечки должны
- 31. 3. Четырехугольники без диагоналей проф. Зубрицкого И.В. В условиях полузакрытой местности, в населенных пунктах с квартальной
- 32. На местности создается система примыкающих друг к другу четырехуголь-ников. В них измеряются все углы и некоторые
- 33. Рассмотрим четырехугольник ABCD, в котором известны стороны a, b и углы А, B, C, необходимо определить
- 34. Непосредственно из чертежа получим: Отсюда
- 35. Аналогично найдем
- 36. Решение четырехугольников можно проконтролировать путем вычисления сторон a и b, считая исходными стороны c и d
- 37. 4. Полярно-лучевой метод. При наличии электронных дальномеров и тахеометров съемочное обоснование можно создавать полярно-лучевым методом. Схемы
- 38. Например, между исходными пунктами А и F прокладывается основной ход ABCDEF . Координаты точек 1, 2,
- 39. Если по условиям местности этого сделать нельзя, то используют дополнительную станцию, расположенную вблизи основной. Устанавливают прибор
- 40. Затем измеряют расстояния АА/ – рулеткой, а до точек 1, 2 и 3 электронным дальномером. Зная
- 42. Скачать презентацию
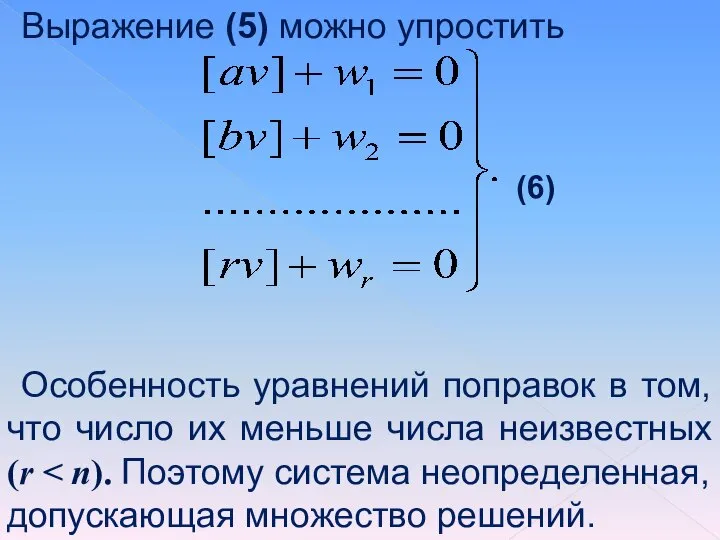
Выражение (5) можно упростить
(6)
Особенность уравнений поправок в том, что число
Выражение (5) можно упростить
(6)
Особенность уравнений поправок в том, что число
Рассмотрим решение задачи по определению поправок для случая равноточных измерений в
Рассмотрим решение задачи по определению поправок для случая равноточных измерений в
![(7) Составим функцию путем прибавления к [v2] левых частей уравнения (6),](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1304995/slide-3.jpg)
(7)
Составим функцию путем прибавления к [v2] левых частей уравнения (6), умножив
(7)
Составим функцию путем прибавления к [v2] левых частей уравнения (6), умножив
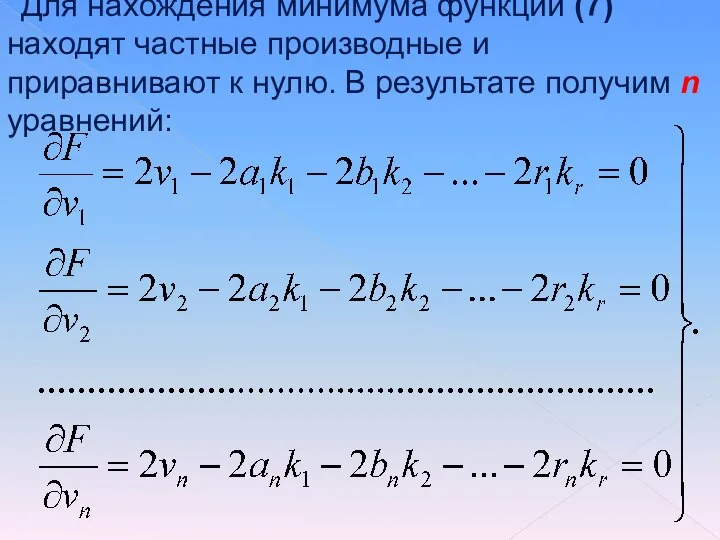
Для нахождения минимума функции (7) находят частные производные и приравнивают к
Для нахождения минимума функции (7) находят частные производные и приравнивают к
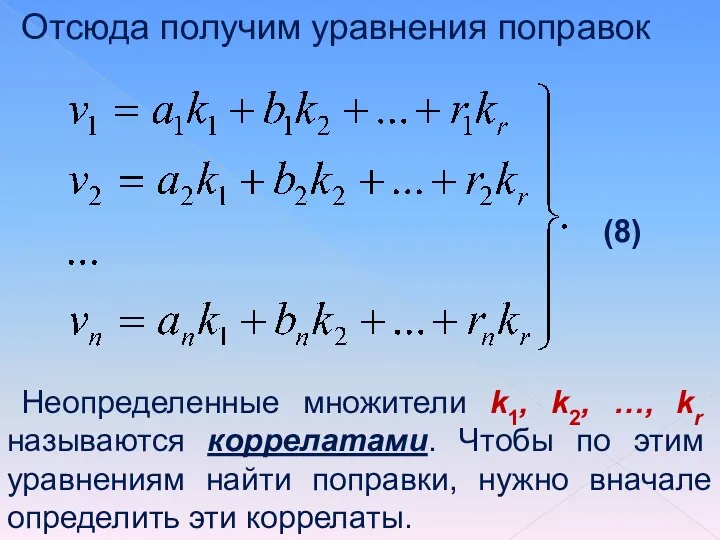
Отсюда получим уравнения поправок
(8)
Неопределенные множители k1, k2, …, kr называются коррелатами.
Отсюда получим уравнения поправок
(8)
Неопределенные множители k1, k2, …, kr называются коррелатами.
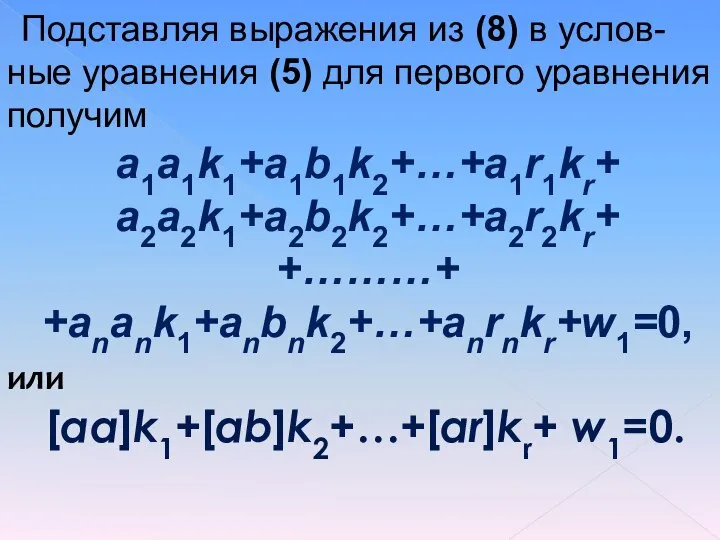
Подставляя выражения из (8) в услов-ные уравнения (5) для первого уравнения
Подставляя выражения из (8) в услов-ные уравнения (5) для первого уравнения
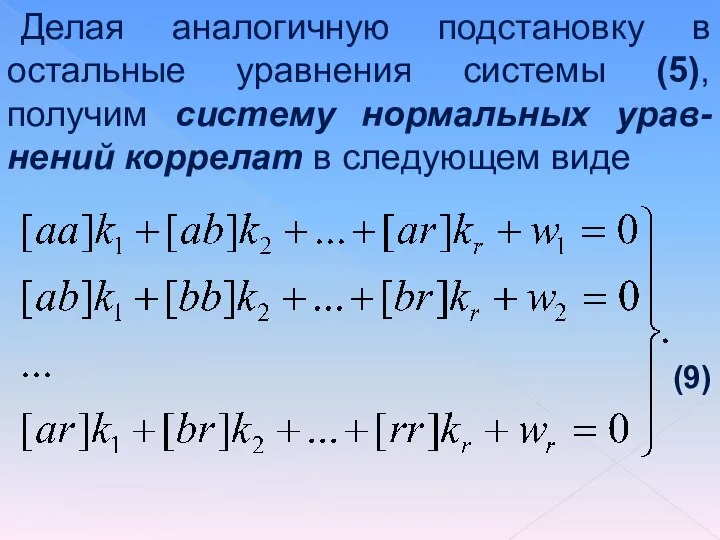
Делая аналогичную подстановку в остальные уравнения системы (5), получим систему нормальных
Делая аналогичную подстановку в остальные уравнения системы (5), получим систему нормальных
![Коэффициенты [aa], [bb], …., [rr], распо-ложенные на главной диагонали, всегда положительны](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1304995/slide-8.jpg)
Коэффициенты [aa], [bb], …., [rr], распо-ложенные на главной диагонали, всегда положительны
Коэффициенты [aa], [bb], …., [rr], распо-ложенные на главной диагонали, всегда положительны
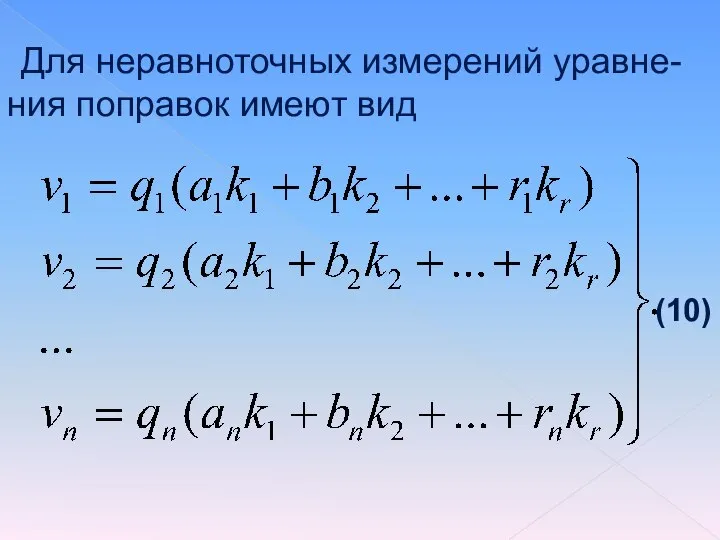
Для неравноточных измерений уравне-ния поправок имеют вид
(10)
Для неравноточных измерений уравне-ния поправок имеют вид
(10)
Нормальные уравнения коррелат будут такими
(11)
В этих выражениях q – величина
Нормальные уравнения коррелат будут такими
(11)
В этих выражениях q – величина
2. Понятие о параметрическом способе уравнивания.
Пусть измерено n величин. Получены значения
2. Понятие о параметрическом способе уравнивания.
Пусть измерено n величин. Получены значения
Между уравненным значением измеренной величины и искомыми неизвестными всегда можно найти
Между уравненным значением измеренной величины и искомыми неизвестными всегда можно найти
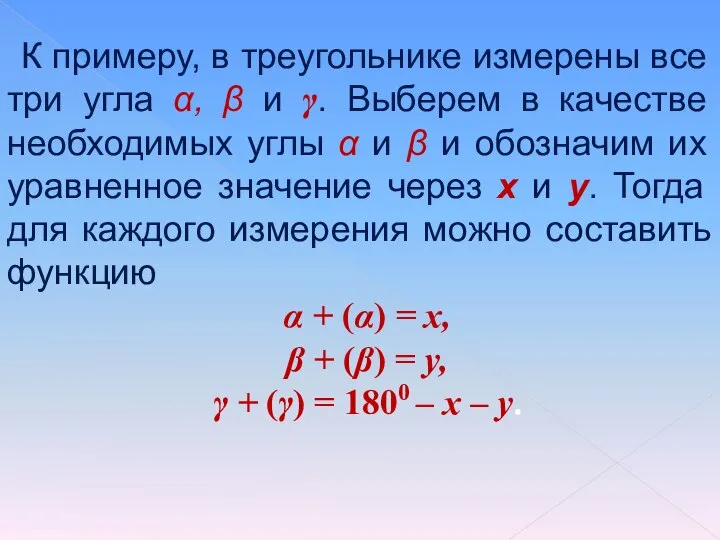
К примеру, в треугольнике измерены все три угла α, β и
К примеру, в треугольнике измерены все три угла α, β и
Запишем (12) в таком виде
(13)
Найдем x, y, …, w при
Запишем (12) в таком виде
(13)
Найдем x, y, …, w при
Для этого представим уравненные значения неизвестных в следующем виде
х =
Для этого представим уравненные значения неизвестных в следующем виде
х =
При разложении (13) в ряд получим
Введем обозначения:
При разложении (13) в ряд получим
Введем обозначения:
С учетом их запишем
(15)
Уравнение (15) называют парамет-рическим уравнением поправок. Частные
С учетом их запишем
(15)
Уравнение (15) называют парамет-рическим уравнением поправок. Частные
![Исходя из принципа наименьших квадратов u = [pv2] = min, найдем](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1304995/slide-18.jpg)
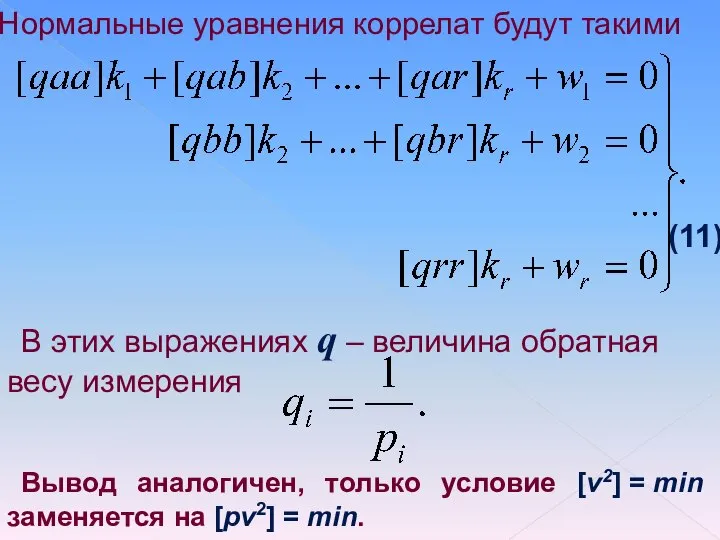
Исходя из принципа наименьших квадратов u = [pv2] = min, найдем
Исходя из принципа наименьших квадратов u = [pv2] = min, найдем
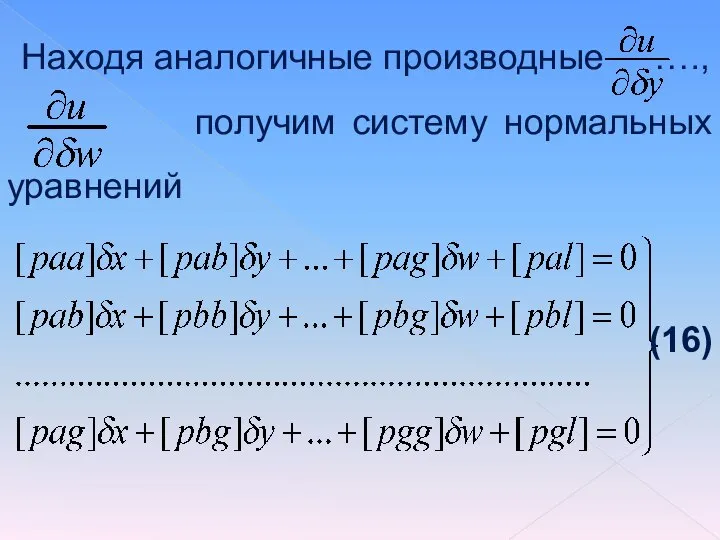
(16)
(16)
В этой системе число уравнений равно числу неизвестных. Решив ее, найдем
В этой системе число уравнений равно числу неизвестных. Решив ее, найдем
Тема «Методы создания съемочных сетей»
Теодолитные ходы.
Микротриангуляция.
Четырехугольники без диагоналей проф. Зубрицкого И.В.
Полярно-лучевой
Тема «Методы создания съемочных сетей»
Теодолитные ходы.
Микротриангуляция.
Четырехугольники без диагоналей проф. Зубрицкого И.В.
Полярно-лучевой
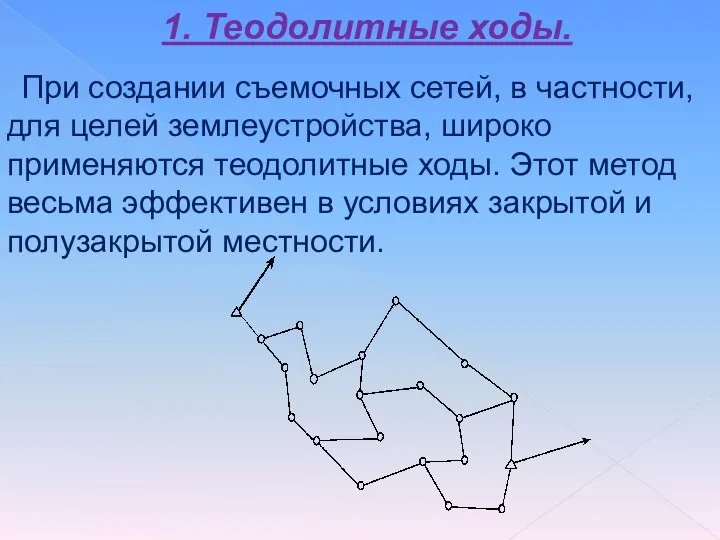
1. Теодолитные ходы.
При создании съемочных сетей, в частности, для целей землеустройства,
1. Теодолитные ходы.
При создании съемочных сетей, в частности, для целей землеустройства,
Если необходимо выполнить съемку какого-то землепользования, то основной теодолитный ход прокладывается
Если необходимо выполнить съемку какого-то землепользования, то основной теодолитный ход прокладывается
Предельные угловые невязки опреде-ляются по формуле
где n – число углов
Предельные угловые невязки опреде-ляются по формуле
где n – число углов
Теодолитные ходы в зависимости от условий местности прокладываются с предельными относительными
Теодолитные ходы в зависимости от условий местности прокладываются с предельными относительными
2. Микротриангуляция.
В условиях открытой и всхолмленной местности съемочные сети взамен теодолитных
2. Микротриангуляция.
В условиях открытой и всхолмленной местности съемочные сети взамен теодолитных
Она строится в виде несложных сетей треугольников (а), цепочек треугольников (б),
Она строится в виде несложных сетей треугольников (а), цепочек треугольников (б),
В качестве исходных сторон используется стороны триангуляции или полигонометрии 1 и
В качестве исходных сторон используется стороны триангуляции или полигонометрии 1 и
Определение точек прямой засечкой производится не менее чем с трех пунктов,
Определение точек прямой засечкой производится не менее чем с трех пунктов,
3. Четырехугольники без диагоналей проф. Зубрицкого И.В.
В условиях полузакрытой местности, в
3. Четырехугольники без диагоналей проф. Зубрицкого И.В.
В условиях полузакрытой местности, в
На местности создается система примыкающих друг к другу четырехуголь-ников.
В
На местности создается система примыкающих друг к другу четырехуголь-ников.
В
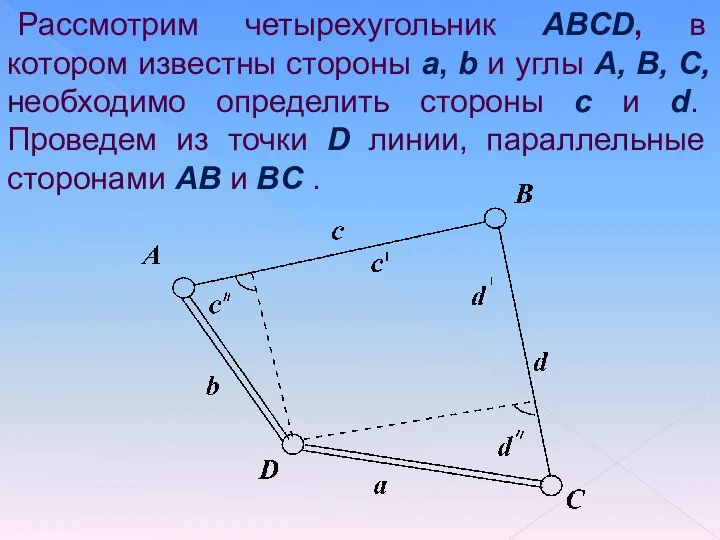
Рассмотрим четырехугольник ABCD, в котором известны стороны a, b и углы
Рассмотрим четырехугольник ABCD, в котором известны стороны a, b и углы
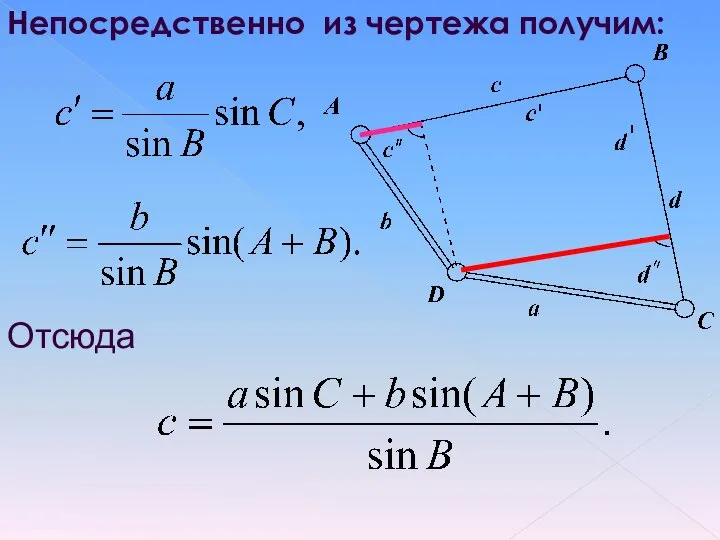
Непосредственно из чертежа получим:
Отсюда
Непосредственно из чертежа получим:
Отсюда
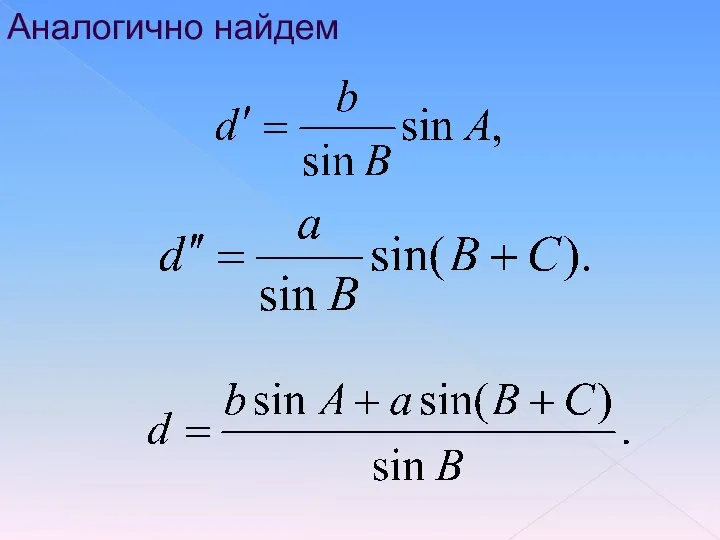
Аналогично найдем
Аналогично найдем
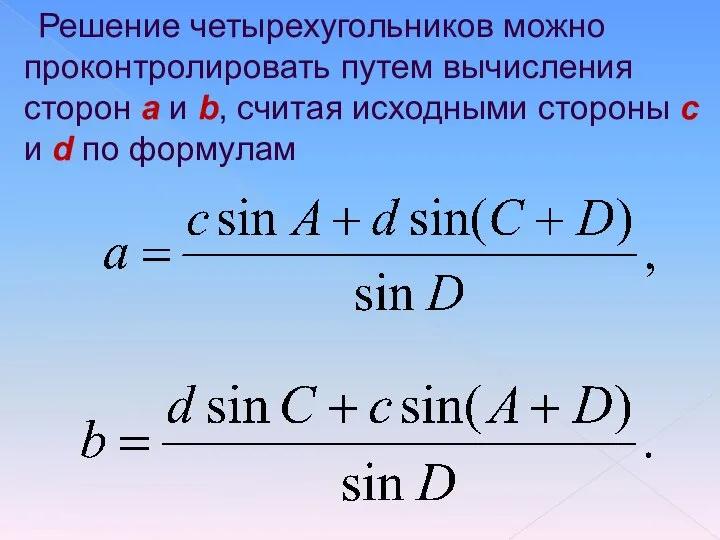
Решение четырехугольников можно проконтролировать путем вычисления сторон a и b, считая
Решение четырехугольников можно проконтролировать путем вычисления сторон a и b, считая
4. Полярно-лучевой метод.
При наличии электронных дальномеров и тахеометров съемочное обоснование можно
4. Полярно-лучевой метод.
При наличии электронных дальномеров и тахеометров съемочное обоснование можно
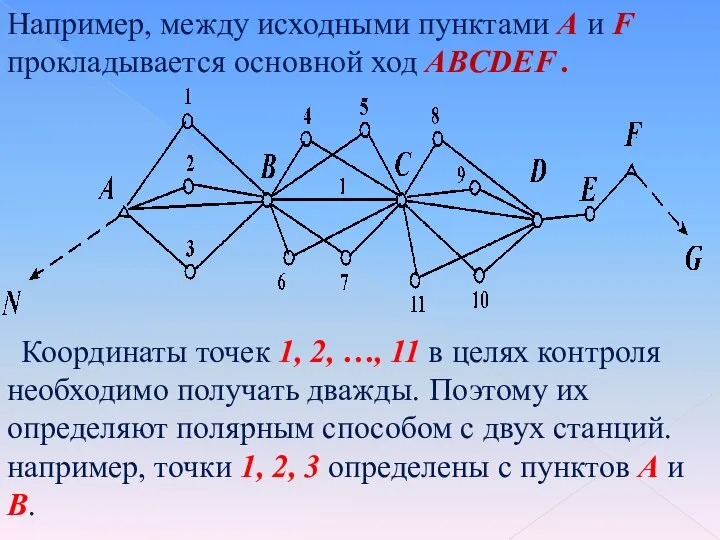
Например, между исходными пунктами А и F прокладывается основной ход ABCDEF
Например, между исходными пунктами А и F прокладывается основной ход ABCDEF
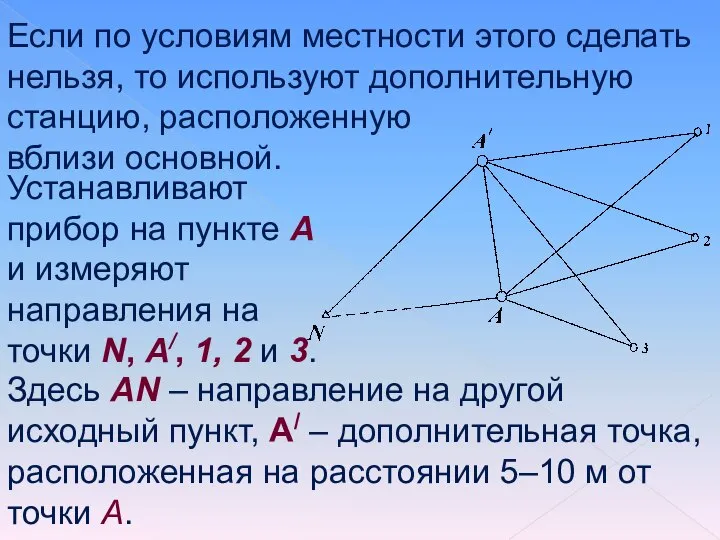
Если по условиям местности этого сделать нельзя, то используют дополнительную станцию,
Если по условиям местности этого сделать нельзя, то используют дополнительную станцию,
Затем измеряют расстояния АА/ – рулеткой, а до точек 1, 2
Затем измеряют расстояния АА/ – рулеткой, а до точек 1, 2
 Презентация "Музыкальные инструменты на Руси" - скачать презентации по МХК
Презентация "Музыкальные инструменты на Руси" - скачать презентации по МХК Vēlēšanas. Socioloģiskā teorija. Psiholoģiskā teorija
Vēlēšanas. Socioloģiskā teorija. Psiholoģiskā teorija Валютная политика в странах Таможенного союза
Валютная политика в странах Таможенного союза Новый год в Греции
Новый год в Греции Дифракция ЭМВ. Основы световой микроскопии
Дифракция ЭМВ. Основы световой микроскопии Le français du début du XXIème siècle: changements dans le système vocalique
Le français du début du XXIème siècle: changements dans le système vocalique Инфаркт Миокарда
Инфаркт Миокарда Все заряды в веществе можно разделить на два класса - свободные и связанные
Все заряды в веществе можно разделить на два класса - свободные и связанные Домашние животные - презентация для начальной школы
Домашние животные - презентация для начальной школы Презентация "От барокко к классицизму" - скачать презентации по МХК
Презентация "От барокко к классицизму" - скачать презентации по МХК Стандарты нового поколения
Стандарты нового поколения Презентация на тему "Федеральные государственные требования к структуре основной общеобразовательной программы дошкольного о
Презентация на тему "Федеральные государственные требования к структуре основной общеобразовательной программы дошкольного о THEORETICAL AND METHODOLOGICAL BASES OF THE LEARNING THE FICTIONAL ANTHROPONYMS’ TRANSLATION
THEORETICAL AND METHODOLOGICAL BASES OF THE LEARNING THE FICTIONAL ANTHROPONYMS’ TRANSLATION The operation of the diode and the device
The operation of the diode and the device ПРЕПАРАТЫ СТЕРОИДНЫХ ГОРМОНОВ, ИХ СИНТЕТИЧЕСКИХ ЗАМЕНИТЕЛЕЙ И АНТАГОНИСТОВ
ПРЕПАРАТЫ СТЕРОИДНЫХ ГОРМОНОВ, ИХ СИНТЕТИЧЕСКИХ ЗАМЕНИТЕЛЕЙ И АНТАГОНИСТОВ Krankheiten
Krankheiten Формальные и неформальные способы разрешения экономических конфликтов
Формальные и неформальные способы разрешения экономических конфликтов Жовтнева вулиця. Ансамбль круглої площі
Жовтнева вулиця. Ансамбль круглої площі Рабочие программы дисциплин и практик: о проблемах формирования пакета ООП Сундиева А.А.
Рабочие программы дисциплин и практик: о проблемах формирования пакета ООП Сундиева А.А. Русская матрешка. Приобщение детей к истокам русской народной культуры
Русская матрешка. Приобщение детей к истокам русской народной культуры Презентация Субъекты и объекты административных правоотношений
Презентация Субъекты и объекты административных правоотношений  Презентация Текстильные материалы Ткани
Презентация Текстильные материалы Ткани Космические задачи - презентация для начальной школы_
Космические задачи - презентация для начальной школы_ Город-курорт Сочи
Город-курорт Сочи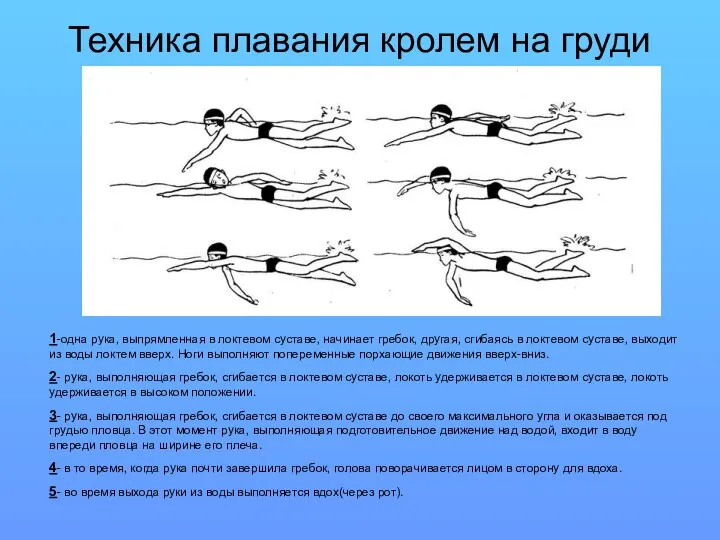 Техника способов плавания
Техника способов плавания Сюжетно-ролевая игра, как средство формирования связной речи и социального развития дошкольников
Сюжетно-ролевая игра, как средство формирования связной речи и социального развития дошкольников Без названия
Без названия Уголовная ответственность несовершеннолетних
Уголовная ответственность несовершеннолетних