- Elektriska piedzina. (№1)

Содержание
- 2. SATURS IEVADS. ELEKTRISKĀS PIEDZIŅAS JĒDZIENS ELEKTRISKĀS PIEDZIŅAS ATTĪSTĪBAS VĒSTURE ELEKTRISKĀS PIEDZIŅAS MEHĀNIKA ELEKTRISKĀS PIEDZIŅAS MEHĀNISKĀS RAKSTURLĪKNES
- 3. IZMANTOJAMĀ LITERATŪRA Ribickis L., Valeinis J. Elektriskā piedziņa mehatronikas sistēmās. – Rīga: RTU, 2008. – 286
- 4. Elektriskā piedziņa pārveido elektrisko enerģiju mehāniskajā un nodrošina ražošanas iekārtas vadību ar elektrību. Definīcija:
- 5. Elektriskās piedziņas struktūrshēma.
- 6. Regulējamas maiņstrāvas piedziņas struktūrshēma: PP – vadāms spēka elektronikas pārveidotājs, D – dzinējs jeb elektromehāniskais parveidotājs,
- 7. Elektriskās piedziņas sastāvs
- 8. Elektriskās piedziņas sastāvs
- 9. Elektriskās piedziņas darbības varianti Elektroenerģija → mehāniskā (motors = dzinējs) Mehāniskā → elektriskā (motors = ģenerators)
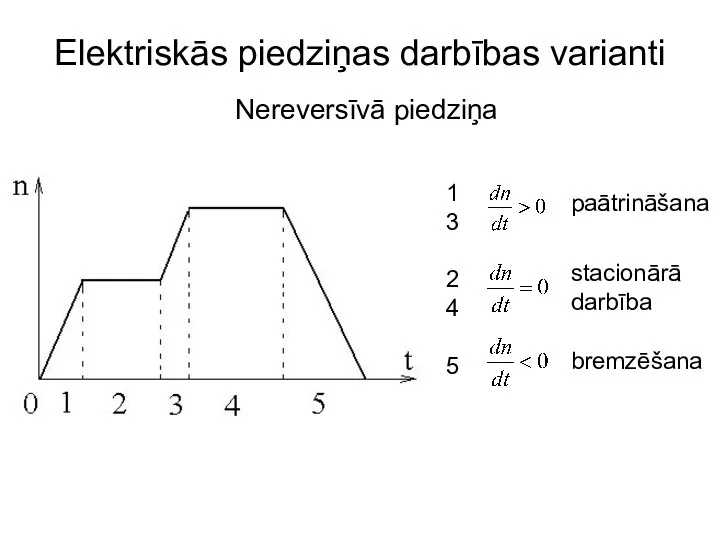
- 10. Elektriskās piedziņas darbības varianti Nereversīvā piedziņa 1 3 2 4 5 paātrināšana stacionārā darbība bremzēšana
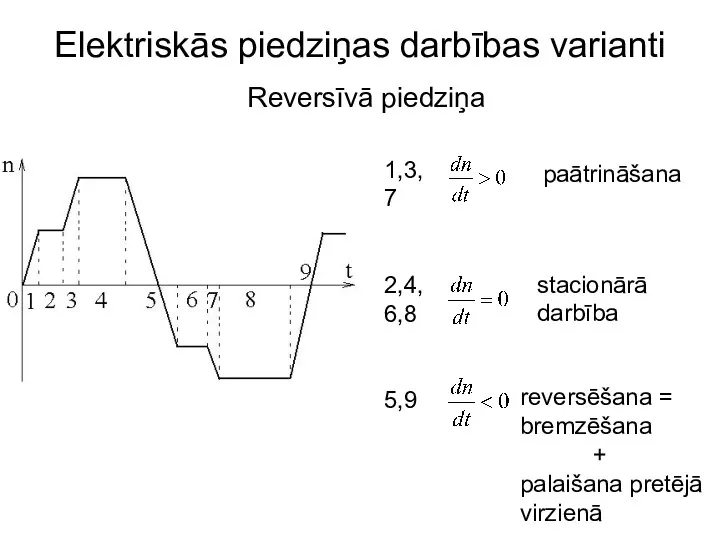
- 11. Elektriskās piedziņas darbības varianti Reversīvā piedziņa 1,3, 7 2,4, 6,8 5,9 paātrināšana stacionārā darbība reversēšana =
- 12. Nominālie lielumi Nominālā jauda uz vārpstas PN W; kW Nominālais rotācijas ātrums nN 1/min Nominālais moments
- 13. Elektriskās piedziņas mehānika [ Nm ] [ rad/s ] [ m/s ] [ rot.W ] [
- 14. Pārveidošana mehāniskā kustībā
- 15. Pārveidošana mehāniskā kustībā
- 16. MOMENTU REDUCĒŠANA Reducētai un reālai sistēmai jābūt ar vienām un tām pašām kinemātiskām un dinamiskām īpašībām.
- 17. Momentu reducēšana griezes kustības gadījumā pamatojas uz reālās un reducētās jaudas vienādību: kur Mst - darba
- 18. Inerces momentu reducēšana uz dzinēja vārpstas pamatojas uz to, ka reducētās un reālās sistēmas kinētiskajām enerģijām
- 19. Virzes kustības spēka reducēšana uz dzinēja vārpstas, ja piedziņas darba mašīna veic darbu virzes kustībā vai
- 20. Kustības vienādojums Mdz – motora moments, Nm Mst – statiskais pretestības moments, Nm Mdin – dinamiskais
- 21. Aprēķinos bieži inerces momenta vietā lieto spara momentu kur g - brīvās krišanas paātrinājums. Tad griezes
- 22. Mdz > Mst - dzinējs paātrinās, b) Mdz = Mst - vienmērīga kustība, c) Mdz Kustības
- 23. Elektriskās piedziņas kursā izmanto šādu sakarību starp momentu un jaudu: kur P - dzinēja jauda, kW.
- 24. Pretestības moments 1 – aktīvais - ceļamās ietaises
- 25. Pretestības moments 2 – reaktīvais statiskā momenta daļa, kas nav atkarīga no griešanās frekvences; statiskā momenta
- 26. Pretestības moments a = 0, Mst = const - transportieri ar nemainīgu kravu - daži metālapstrādes
- 27. Piedziņas darbības stabilitāte n Stabila piedziņas darbība n Nestabila piedziņas darbība
- 28. Piedziņas dzinēja, darba mašīnas un dinamiskā momenta raksturlīkne Elektriskās piedziņas nostabilizējušos režīmu raksturo līdzsvars starp darba
- 29. Elektriskiem dzinējiem izšķir dabisko un mākslīgo mehānisko raksturlīkni. Par dabisko dzinēja mehānisko raksturlīkni sauc n =
- 30. Dzinēju mehāniskās raksturlīknes 1 – absolūti cieta 2 – cieta 3 - mīksta
- 31. Vēl elektrisko dzinēju raksturlīknes raksturo pēc kritērija, ko sauc par cietību jeb stingumu: Raksturlīknes cietība nosaka
- 32. Visu elektrisko dzinēju mehāniskās raksturlīknes iedala trijās grupās: 1. Raksturlīkne ir absolūti cieta, ja griešanās frekvence
- 33. Regulēšanas diapazons Regulēšanas vienmērīgums Regulēšanas ekonomiskums Griešanās frekvences stabilitāte Regulēšanas virziens Pieļaujamā dzinēja slodze Griešanās frekvences
- 34. 1. Regulēšanas diapazons ir maksimālās un minimālās griešanās frekvences vai leņķiskā ātruma attiecība pie noteiktas regulēšanas
- 35. 2. Regulēšanas vienmērīgumu raksturo griešanās frekvences lēciens no esošā ātruma uz nākošo tuvāko. To var novērtēt
- 36. 3. Regulēšanas ekonomiskumu raksturo regulējamās piedziņas uzstādīšanas un ekspluatācijas izdevumi. Regulējamas piedziņas jaudas koeficients cosφ ir
- 37. Griešanās frekvences stabilitāti raksturo tās izmaiņa noteiktās slodzes momenta robežās. Skaitliski šo raksturojumu var noteikt, izvēloties
- 39. Скачать презентацию
SATURS
IEVADS. ELEKTRISKĀS PIEDZIŅAS JĒDZIENS
ELEKTRISKĀS PIEDZIŅAS ATTĪSTĪBAS VĒSTURE
ELEKTRISKĀS PIEDZIŅAS MEHĀNIKA
ELEKTRISKĀS PIEDZIŅAS MEHĀNISKĀS
SATURS
IEVADS. ELEKTRISKĀS PIEDZIŅAS JĒDZIENS
ELEKTRISKĀS PIEDZIŅAS ATTĪSTĪBAS VĒSTURE
ELEKTRISKĀS PIEDZIŅAS MEHĀNIKA
ELEKTRISKĀS PIEDZIŅAS MEHĀNISKĀS
IZMANTOJAMĀ LITERATŪRA
Ribickis L., Valeinis J. Elektriskā piedziņa mehatronikas sistēmās. – Rīga:
IZMANTOJAMĀ LITERATŪRA
Ribickis L., Valeinis J. Elektriskā piedziņa mehatronikas sistēmās. – Rīga:
Elektriskā piedziņa pārveido elektrisko enerģiju mehāniskajā un nodrošina ražošanas iekārtas vadību
Elektriskā piedziņa pārveido elektrisko enerģiju mehāniskajā un nodrošina ražošanas iekārtas vadību
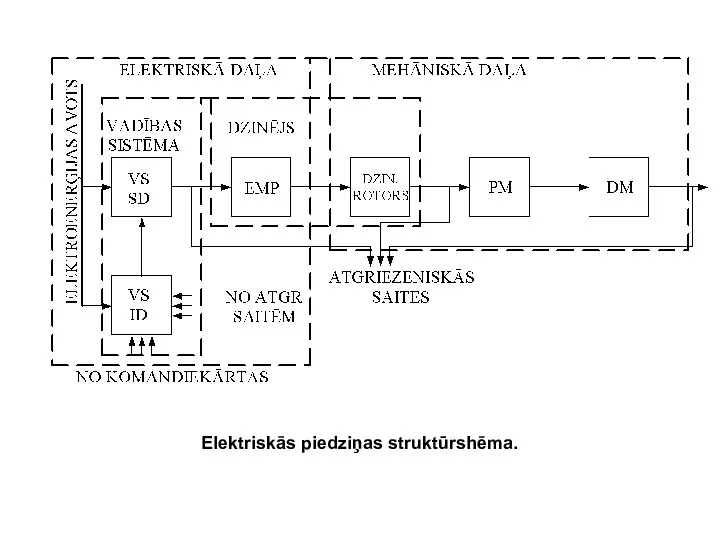
Elektriskās piedziņas struktūrshēma.
Elektriskās piedziņas struktūrshēma.
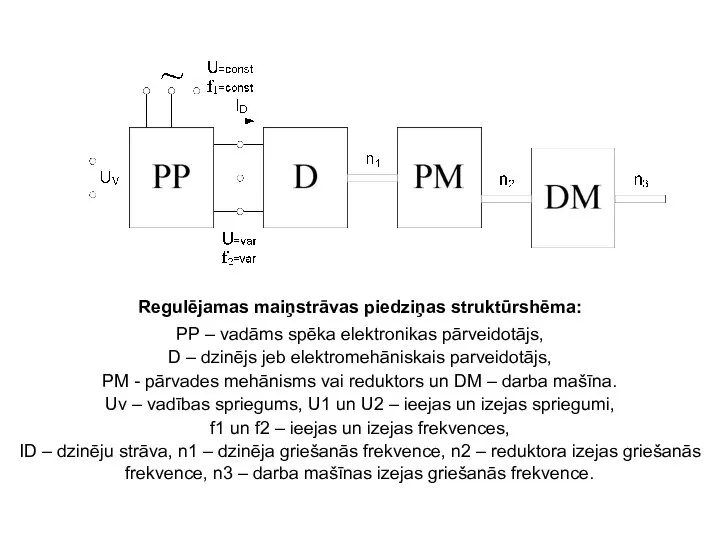
Regulējamas maiņstrāvas piedziņas struktūrshēma:
PP – vadāms spēka elektronikas pārveidotājs,
D
Regulējamas maiņstrāvas piedziņas struktūrshēma:
PP – vadāms spēka elektronikas pārveidotājs,
D

Elektriskās piedziņas sastāvs
Elektriskās piedziņas sastāvs

Elektriskās piedziņas sastāvs
Elektriskās piedziņas sastāvs
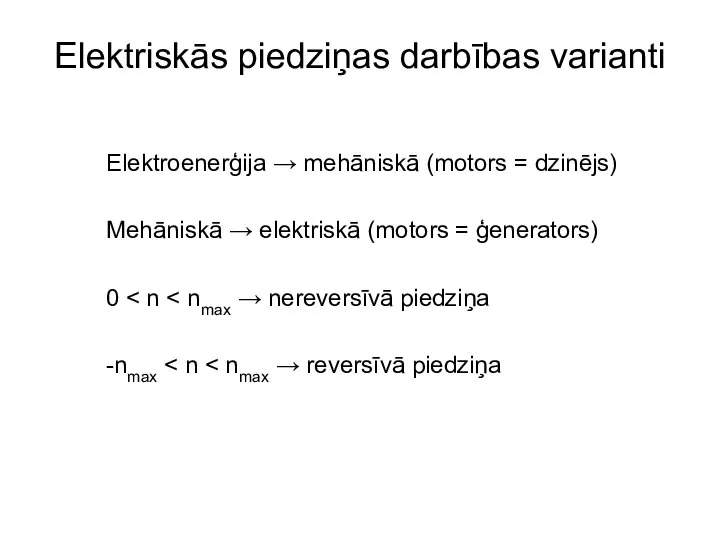
Elektriskās piedziņas darbības varianti
Elektroenerģija → mehāniskā (motors = dzinējs)
Mehāniskā → elektriskā
Elektriskās piedziņas darbības varianti
Elektroenerģija → mehāniskā (motors = dzinējs)
Mehāniskā → elektriskā
Elektriskās piedziņas darbības varianti
Nereversīvā piedziņa
1
3
2
4
5
paātrināšana
stacionārā
darbība
bremzēšana
Elektriskās piedziņas darbības varianti
Nereversīvā piedziņa
1
3
2
4
5
paātrināšana
stacionārā
darbība
bremzēšana
Elektriskās piedziņas darbības varianti
Reversīvā piedziņa
1,3,
7
2,4,
6,8
5,9
paātrināšana
stacionārā
darbība
reversēšana = bremzēšana
+ palaišana pretējā virzienā
Elektriskās piedziņas darbības varianti
Reversīvā piedziņa
1,3,
7
2,4,
6,8
5,9
paātrināšana
stacionārā
darbība
reversēšana = bremzēšana
+ palaišana pretējā virzienā
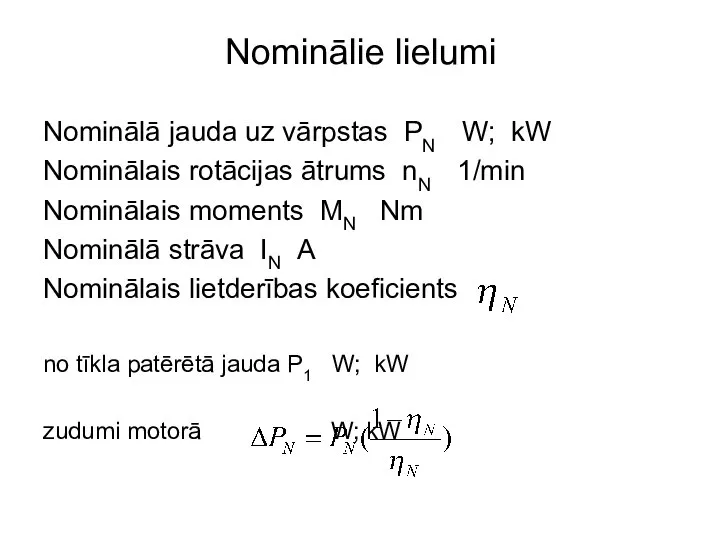
Nominālie lielumi
Nominālā jauda uz vārpstas PN W; kW
Nominālais rotācijas ātrums nN
Nominālie lielumi
Nominālā jauda uz vārpstas PN W; kW
Nominālais rotācijas ātrums nN
![Elektriskās piedziņas mehānika [ Nm ] [ rad/s ] [ m/s](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1480764/slide-12.jpg)
Elektriskās piedziņas mehānika
[ Nm ]
[ rad/s ]
[ m/s ]
[ rot.W ]
[
Elektriskās piedziņas mehānika
[ Nm ]
[ rad/s ]
[ m/s ]
[ rot.W ]
[
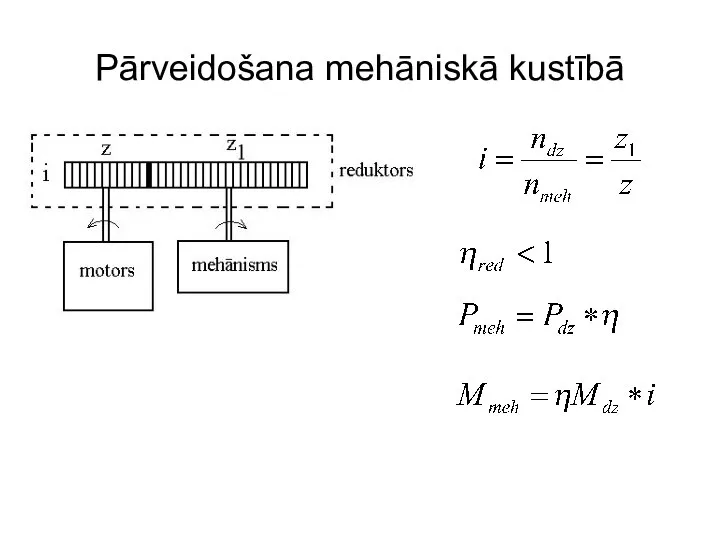
Pārveidošana mehāniskā kustībā
Pārveidošana mehāniskā kustībā
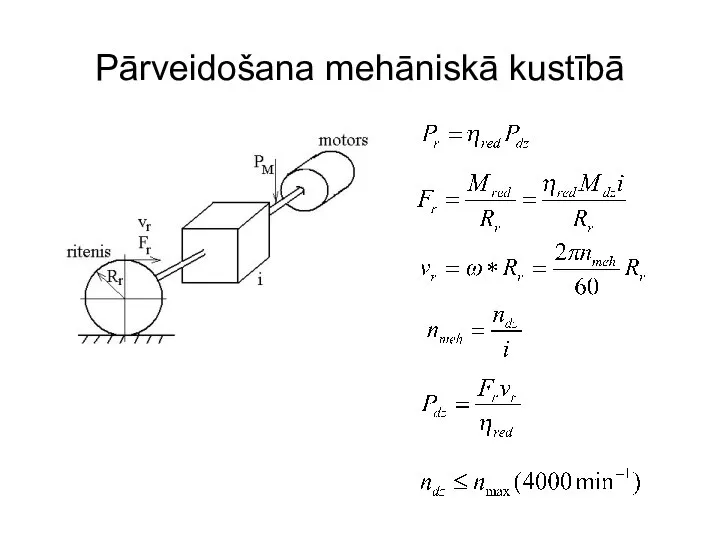
Pārveidošana mehāniskā kustībā
Pārveidošana mehāniskā kustībā
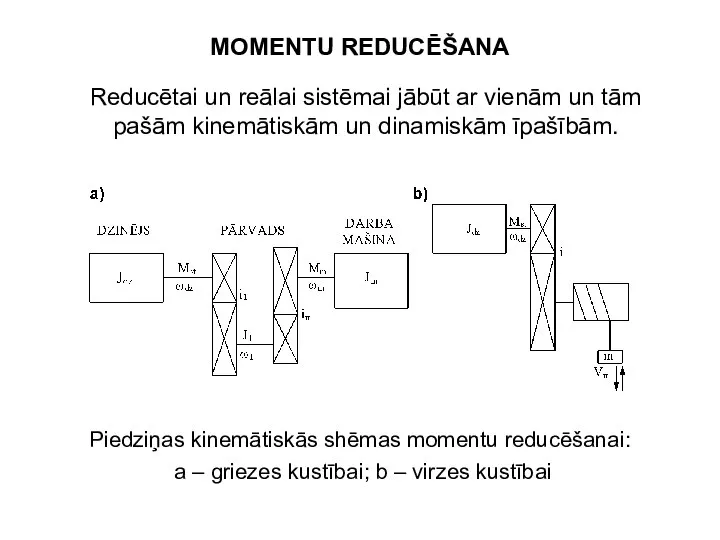
MOMENTU REDUCĒŠANA
Reducētai un reālai sistēmai jābūt ar vienām un tām
MOMENTU REDUCĒŠANA
Reducētai un reālai sistēmai jābūt ar vienām un tām
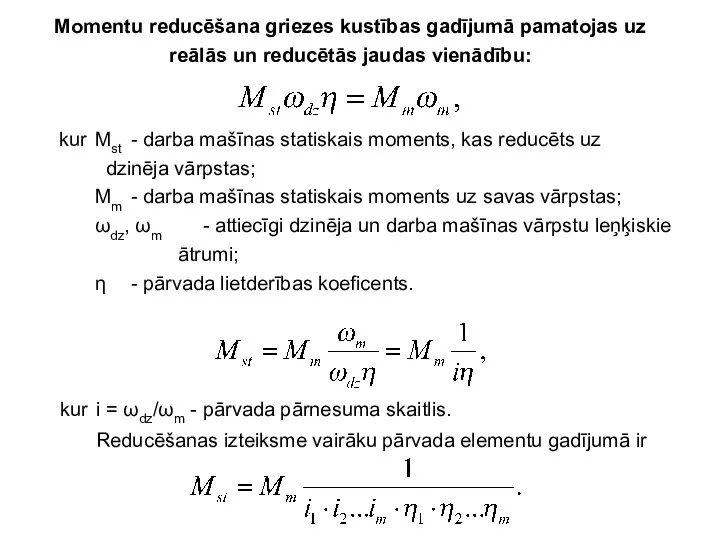
Momentu reducēšana griezes kustības gadījumā pamatojas uz reālās un reducētās jaudas
Momentu reducēšana griezes kustības gadījumā pamatojas uz reālās un reducētās jaudas
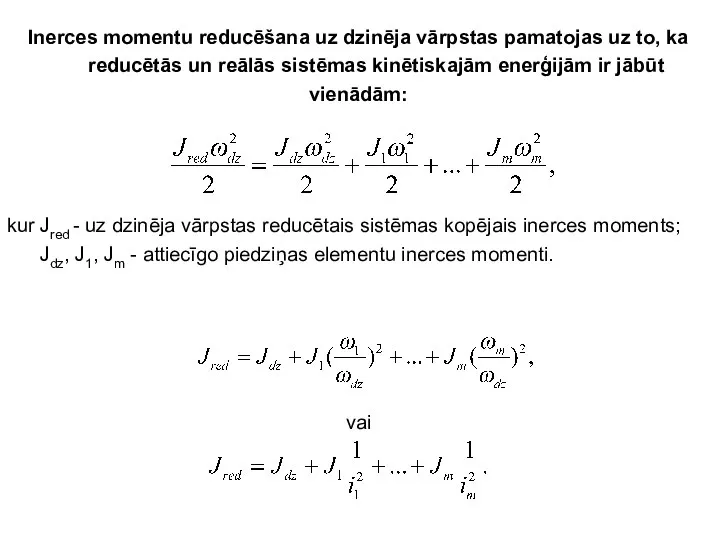
Inerces momentu reducēšana uz dzinēja vārpstas pamatojas uz to, ka reducētās
Inerces momentu reducēšana uz dzinēja vārpstas pamatojas uz to, ka reducētās
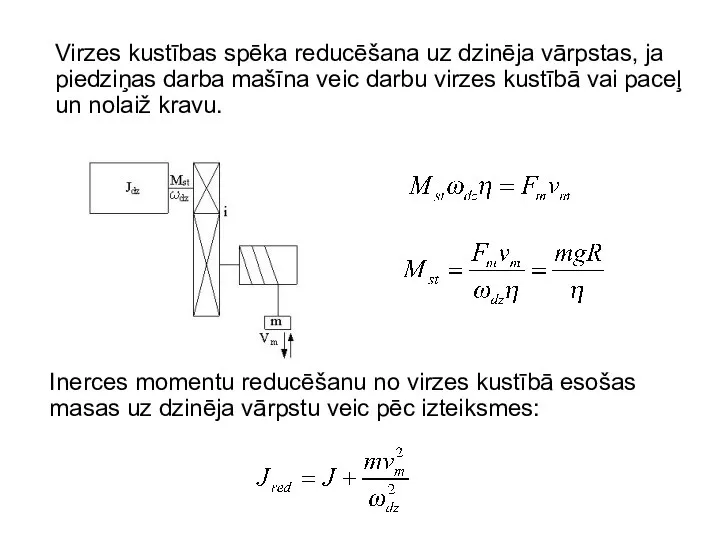
Virzes kustības spēka reducēšana uz dzinēja vārpstas, ja piedziņas darba mašīna
Virzes kustības spēka reducēšana uz dzinēja vārpstas, ja piedziņas darba mašīna
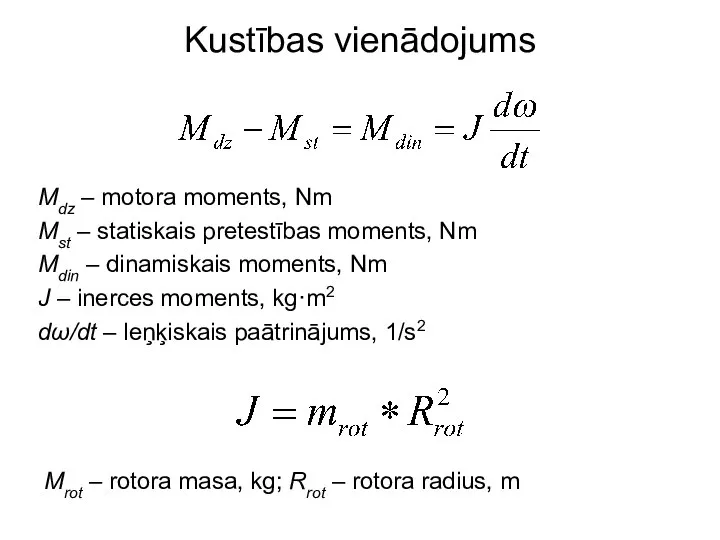
Kustības vienādojums
Mdz – motora moments, Nm
Mst – statiskais pretestības moments, Nm
Mdin
Kustības vienādojums
Mdz – motora moments, Nm
Mst – statiskais pretestības moments, Nm
Mdin
Aprēķinos bieži inerces momenta vietā lieto spara momentu
kur g -
Aprēķinos bieži inerces momenta vietā lieto spara momentu
kur g -
Mdz > Mst - dzinējs paātrinās,
b) Mdz = Mst -
Mdz > Mst - dzinējs paātrinās,
b) Mdz = Mst -
Elektriskās piedziņas kursā izmanto šādu sakarību starp momentu un jaudu:
kur P
Elektriskās piedziņas kursā izmanto šādu sakarību starp momentu un jaudu:
kur P
Pretestības moments
1 – aktīvais
- ceļamās ietaises
Pretestības moments
1 – aktīvais
- ceļamās ietaises
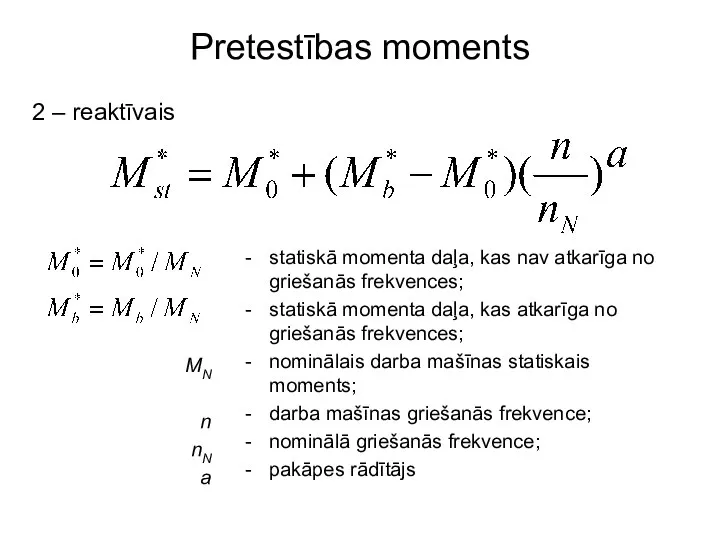
Pretestības moments
2 – reaktīvais
statiskā momenta daļa, kas nav atkarīga no griešanās
Pretestības moments
2 – reaktīvais
statiskā momenta daļa, kas nav atkarīga no griešanās
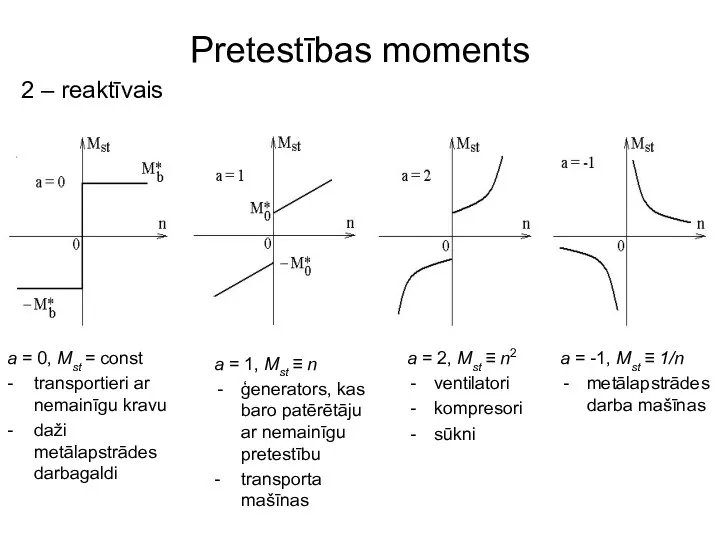
Pretestības moments
a = 0, Mst = const
- transportieri ar nemainīgu kravu
-
Pretestības moments
a = 0, Mst = const
- transportieri ar nemainīgu kravu
-
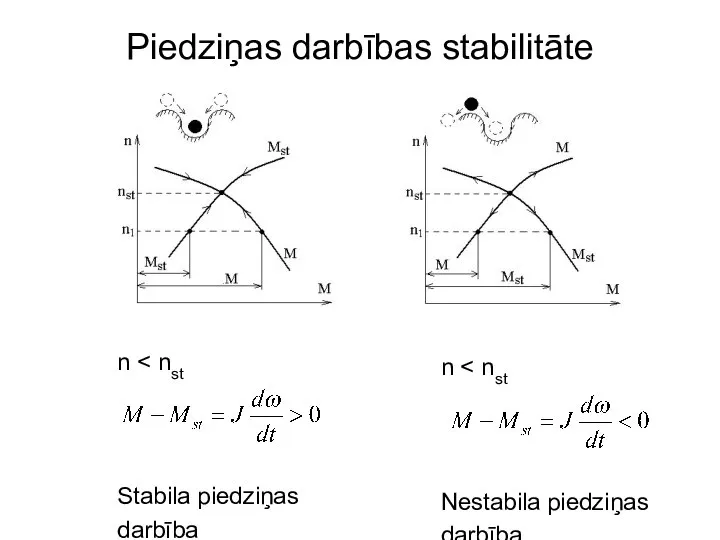
Piedziņas darbības stabilitāte
n < nst
Stabila piedziņas
darbība
n < nst
Nestabila piedziņas
darbība
Piedziņas darbības stabilitāte
n < nst
Stabila piedziņas
darbība
n < nst
Nestabila piedziņas
darbība
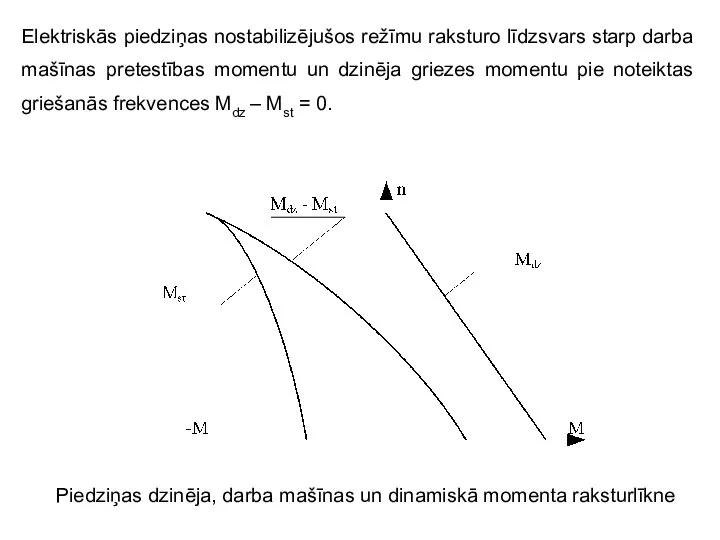
Piedziņas dzinēja, darba mašīnas un dinamiskā momenta raksturlīkne
Elektriskās piedziņas nostabilizējušos
Piedziņas dzinēja, darba mašīnas un dinamiskā momenta raksturlīkne
Elektriskās piedziņas nostabilizējušos
Elektriskiem dzinējiem izšķir dabisko un mākslīgo mehānisko raksturlīkni.
Par dabisko dzinēja mehānisko
Elektriskiem dzinējiem izšķir dabisko un mākslīgo mehānisko raksturlīkni.
Par dabisko dzinēja mehānisko
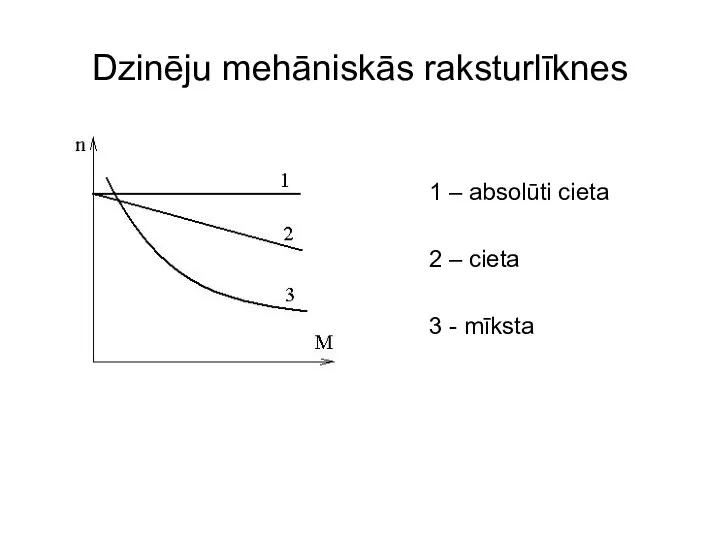
Dzinēju mehāniskās raksturlīknes
1 – absolūti cieta
2 – cieta
3 - mīksta
Dzinēju mehāniskās raksturlīknes
1 – absolūti cieta
2 – cieta
3 - mīksta
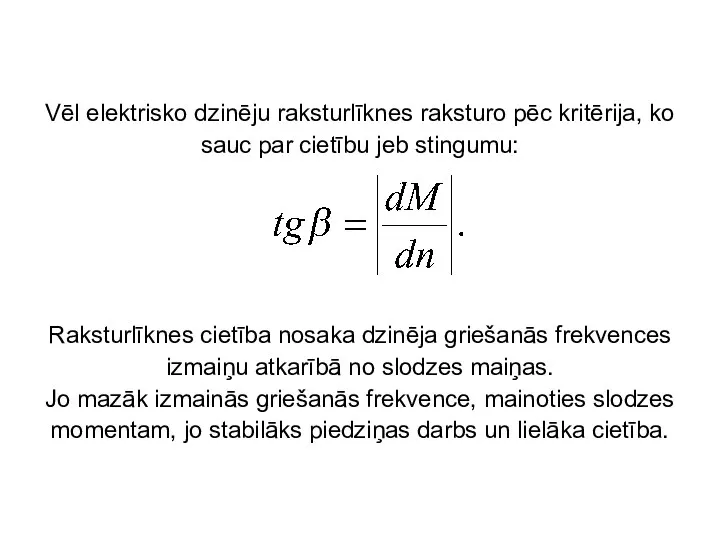
Vēl elektrisko dzinēju raksturlīknes raksturo pēc kritērija, ko sauc par cietību
Vēl elektrisko dzinēju raksturlīknes raksturo pēc kritērija, ko sauc par cietību
Visu elektrisko dzinēju mehāniskās raksturlīknes iedala trijās grupās:
1. Raksturlīkne ir absolūti
Visu elektrisko dzinēju mehāniskās raksturlīknes iedala trijās grupās:
1. Raksturlīkne ir absolūti
Regulēšanas diapazons
Regulēšanas vienmērīgums
Regulēšanas ekonomiskums
Griešanās frekvences stabilitāte
Regulēšanas virziens
Pieļaujamā dzinēja slodze
Griešanās
Regulēšanas diapazons
Regulēšanas vienmērīgums
Regulēšanas ekonomiskums
Griešanās frekvences stabilitāte
Regulēšanas virziens
Pieļaujamā dzinēja slodze
Griešanās
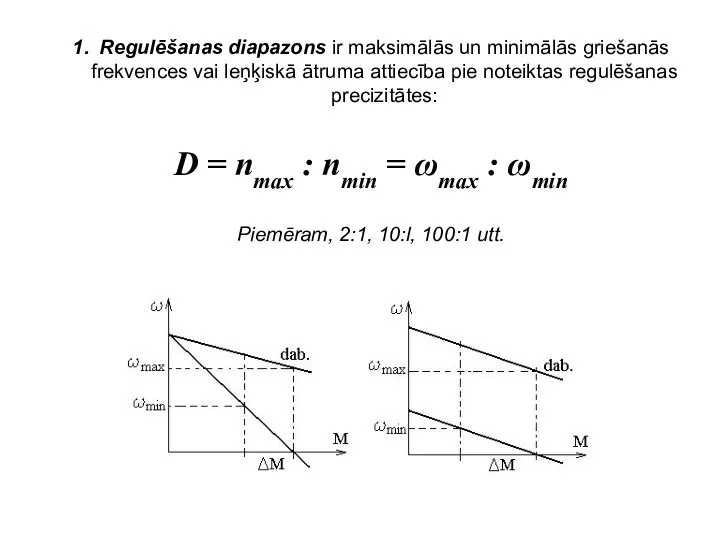
1. Regulēšanas diapazons ir maksimālās un minimālās griešanās frekvences vai leņķiskā
1. Regulēšanas diapazons ir maksimālās un minimālās griešanās frekvences vai leņķiskā
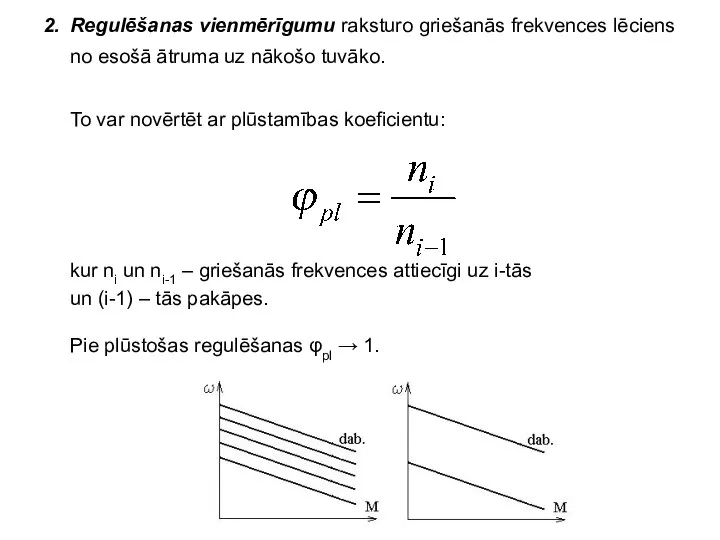
2. Regulēšanas vienmērīgumu raksturo griešanās frekvences lēciens no esošā ātruma uz nākošo
2. Regulēšanas vienmērīgumu raksturo griešanās frekvences lēciens no esošā ātruma uz nākošo
3. Regulēšanas ekonomiskumu raksturo regulējamās piedziņas uzstādīšanas un ekspluatācijas izdevumi.
Regulējamas
3. Regulēšanas ekonomiskumu raksturo regulējamās piedziņas uzstādīšanas un ekspluatācijas izdevumi.
Regulējamas
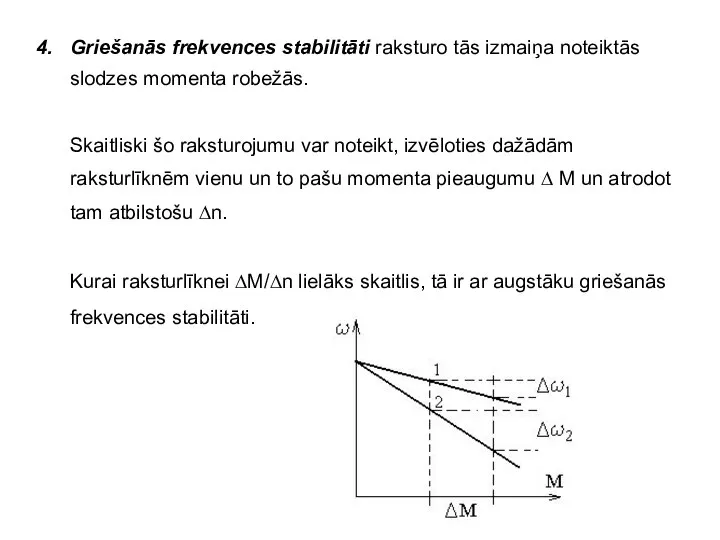
Griešanās frekvences stabilitāti raksturo tās izmaiņa noteiktās slodzes momenta robežās.
Skaitliski šo
Griešanās frekvences stabilitāti raksturo tās izmaiņa noteiktās slodzes momenta robežās.
Skaitliski šo
 Автор: Шутова Анастасия МОУ СОШ № 49 г.Мурманска, 11 «А» класс
Автор: Шутова Анастасия МОУ СОШ № 49 г.Мурманска, 11 «А» класс Поляризация волн. Лекция 5
Поляризация волн. Лекция 5 Проектирование МДП СБИС. Структуры МДП в СБИС
Проектирование МДП СБИС. Структуры МДП в СБИС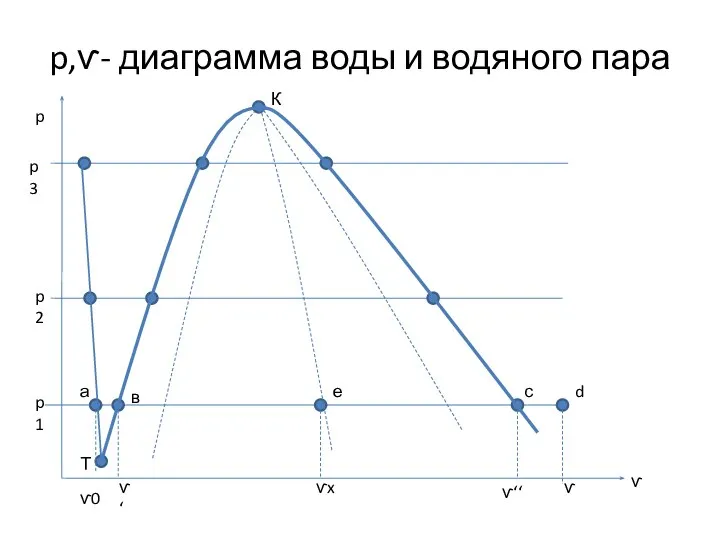 Диаграммы воды и водяного пара
Диаграммы воды и водяного пара Лазерная обработка
Лазерная обработка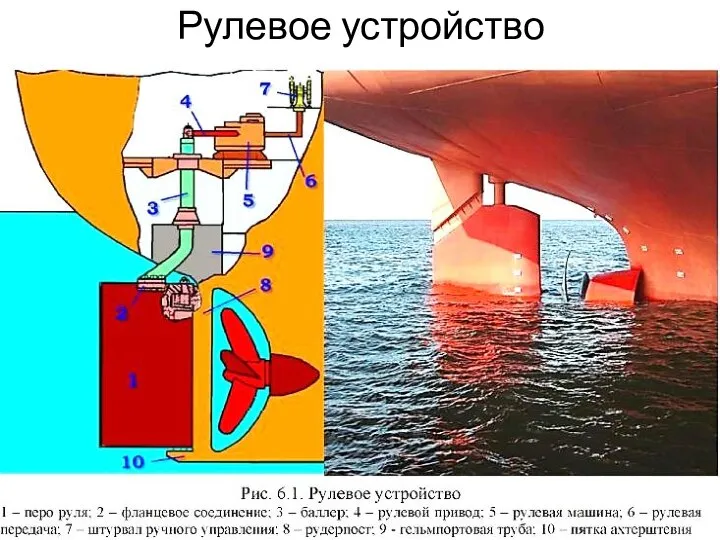 Рулевое устройство
Рулевое устройство Тема: Решение задач по теме: «Давление твердых тел , жидкостей и газов»
Тема: Решение задач по теме: «Давление твердых тел , жидкостей и газов»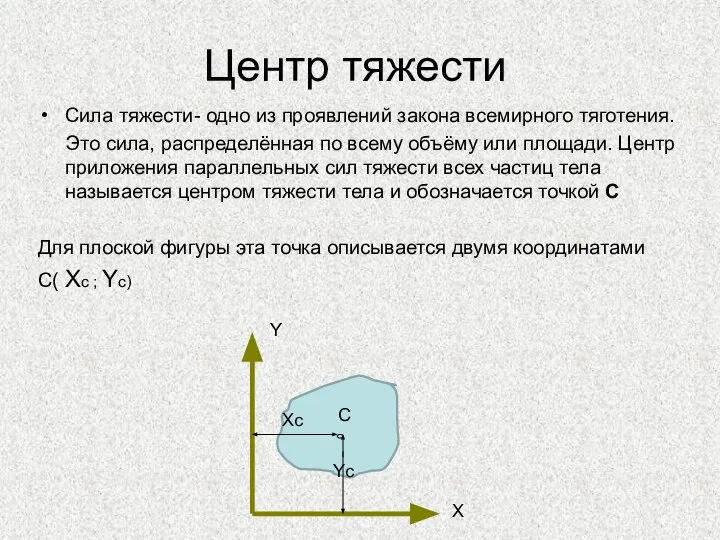 Центр тяжести плоских фигур
Центр тяжести плоских фигур Metal-Insulator-Semiconductor and Metal-Insulator-Metal Structures. Heterogeneous Structures. Diodes
Metal-Insulator-Semiconductor and Metal-Insulator-Metal Structures. Heterogeneous Structures. Diodes Барометр-анероид
Барометр-анероид Презентация Тепловые машины
Презентация Тепловые машины Законы сохранения энергии в механике
Законы сохранения энергии в механике Презентация по физике "Плотность вещества" - скачать
Презентация по физике "Плотность вещества" - скачать  Техническое обслуживание и текущий ремонт ходовой системы сортиментовоза Камаз
Техническое обслуживание и текущий ремонт ходовой системы сортиментовоза Камаз Радиоактивность. Проникающая способность радиации. Открытие изотопов
Радиоактивность. Проникающая способность радиации. Открытие изотопов Презентация по физике "Парообразование" - скачать
Презентация по физике "Парообразование" - скачать  Применение ядерной энергии в различных отраслях. Доза радиоактивного излучения
Применение ядерной энергии в различных отраслях. Доза радиоактивного излучения Үйкеліс күші
Үйкеліс күші ФИЗИКА - наука о движении и взаимодействии материальных объектов.
ФИЗИКА - наука о движении и взаимодействии материальных объектов. Техническое обслуживание и ремонт автомобильного транспорта
Техническое обслуживание и ремонт автомобильного транспорта Закон всемирного тяготения
Закон всемирного тяготения Studia “3A” Production
Studia “3A” Production Классификация веществ по проводимости
Классификация веществ по проводимости Презентация по физике "Плавание тел" - скачать
Презентация по физике "Плавание тел" - скачать  Задачи подвески
Задачи подвески Электростатическое поле в вакууме
Электростатическое поле в вакууме Методы эквивалентных преобразований электрических цепей. (Лекция 3)
Методы эквивалентных преобразований электрических цепей. (Лекция 3) Рентгеновские лучи
Рентгеновские лучи