- Основні чисельні алгоритми методу молекулярної динаміки

Содержание
- 2. Алгоритм Верле “leapfrog” 2. 3.
- 3. Алгоритм Верле у швидкісній формі “velocity Verlet” 2. Цей алгоритм можна виразити також через зсунуті на
- 4. Алгоритми Верле - порівняння (a): Verlet (b): Half-Step (Leapfrog) (c ): Velocity Verlet
- 5. Алгоритм Беемана 2. Більш складний ніж алгоритм Верле у швидкісній формі Та вимагає більше пам’яті комп’ютера,
- 6. Алгоритми типу предиктор-коректор Предиктор : звичайний розклад у ряд Тейлора Коректор : визначає похибку в передбачених
- 7. Алгоритми типу предиктор-коректор. Алгоритм Рунге-Кутта 2. 3. 4.
- 8. Алгоритми типу предиктор-коректор. Алгоритми Гіра c0=1/6, c1=5/6, c2=1, c3=1/3 - алгоритм Гіра 4-го порядку (враховуються 3-ті
- 9. Стабільність алгоритмів при виборі часового кроку Кружечки: Verlet Квадратики: Gear 4th order Трикутники: Gear 5th order
- 10. Стабільність алгоритмів при довгих симуляціях
- 12. Скачать презентацию
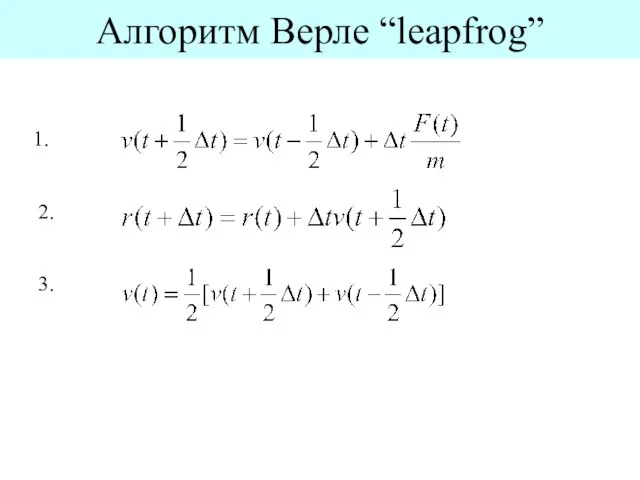
Алгоритм Верле “leapfrog”
2.
3.
Алгоритм Верле “leapfrog”
2.
3.
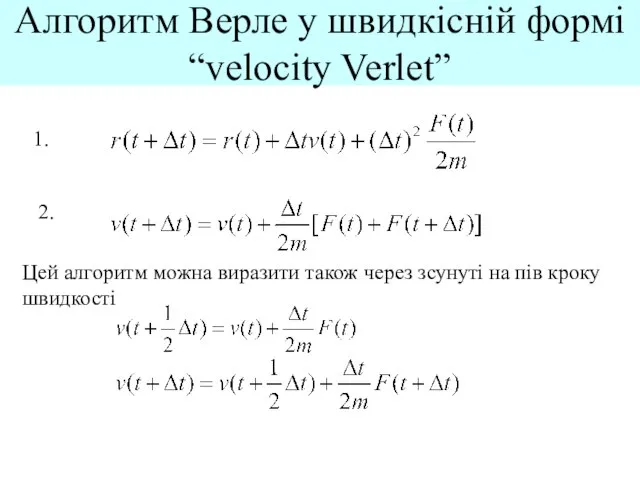
Алгоритм Верле у швидкісній формі
“velocity Verlet”
2.
Цей алгоритм можна виразити також
Алгоритм Верле у швидкісній формі
“velocity Verlet”
2.
Цей алгоритм можна виразити також

Алгоритми Верле - порівняння
(a): Verlet
(b): Half-Step (Leapfrog)
(c ): Velocity Verlet
Алгоритми Верле - порівняння
(a): Verlet
(b): Half-Step (Leapfrog)
(c ): Velocity Verlet

Алгоритм Беемана
2.
Більш складний ніж алгоритм Верле у швидкісній формі
Та вимагає
Алгоритм Беемана
2.
Більш складний ніж алгоритм Верле у швидкісній формі
Та вимагає
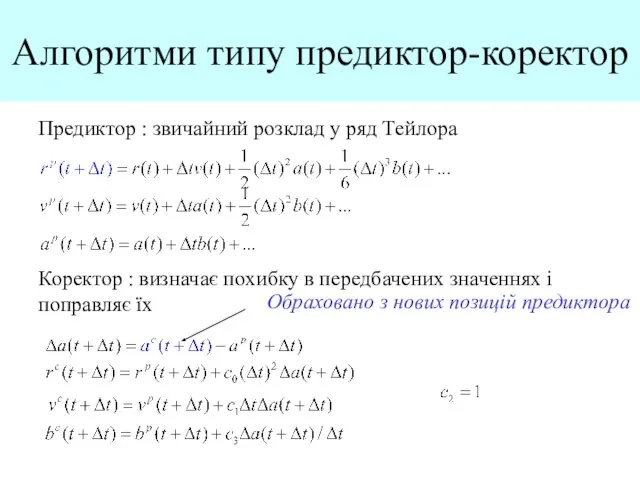
Алгоритми типу предиктор-коректор
Предиктор : звичайний розклад у ряд Тейлора
Коректор : визначає
Алгоритми типу предиктор-коректор
Предиктор : звичайний розклад у ряд Тейлора
Коректор : визначає

Алгоритми типу предиктор-коректор. Алгоритм Рунге-Кутта
2.
3.
4.
Алгоритми типу предиктор-коректор. Алгоритм Рунге-Кутта
2.
3.
4.
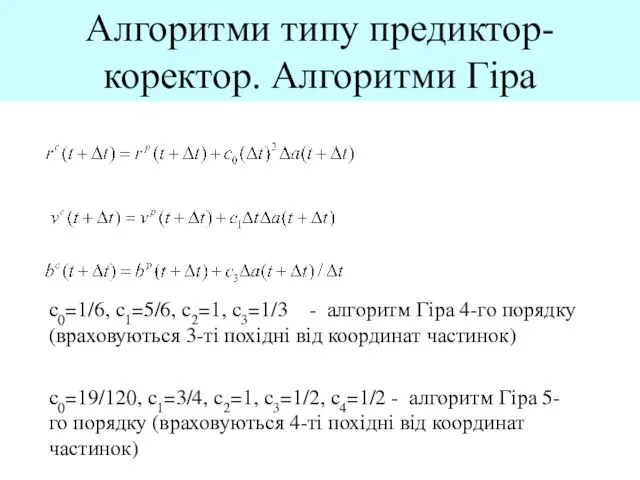
Алгоритми типу предиктор-коректор. Алгоритми Гіра
c0=1/6, c1=5/6, c2=1, c3=1/3 - алгоритм Гіра
Алгоритми типу предиктор-коректор. Алгоритми Гіра
c0=1/6, c1=5/6, c2=1, c3=1/3 - алгоритм Гіра

Стабільність алгоритмів при виборі часового кроку
Кружечки: Verlet
Квадратики: Gear 4th order
Трикутники: Gear
Стабільність алгоритмів при виборі часового кроку
Кружечки: Verlet
Квадратики: Gear 4th order
Трикутники: Gear
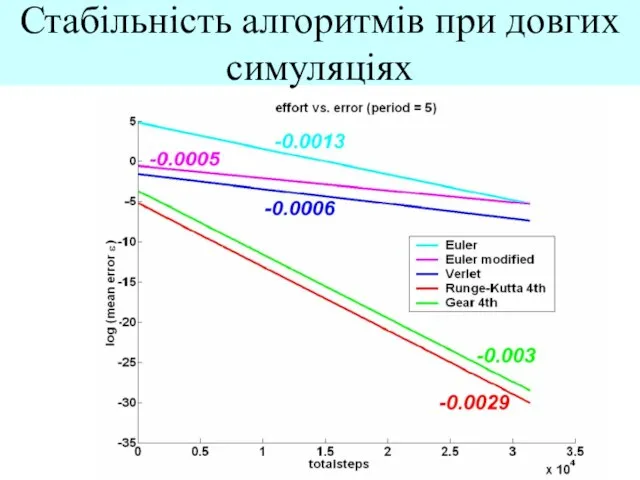
Стабільність алгоритмів при довгих симуляціях
Стабільність алгоритмів при довгих симуляціях
 GameCore. Monogame
GameCore. Monogame Оnline системы управления библиографической информацией в помощь научному и учебному процессу
Оnline системы управления библиографической информацией в помощь научному и учебному процессу Основные этапы разработки и исследования моделей на компьютере Урок-презентация 9 класс
Основные этапы разработки и исследования моделей на компьютере Урок-презентация 9 класс Кейс по созданию сайта математических статей
Кейс по созданию сайта математических статей Протоколы сети Internet
Протоколы сети Internet Логика - наука о формах и способах мышления
Логика - наука о формах и способах мышления Базис и Мкм. 10 первых задач
Базис и Мкм. 10 первых задач Современные алгоритмы шифрования
Современные алгоритмы шифрования Модуль 1. Практическое занятие 3. Метод. Передача параметров. Переключатель
Модуль 1. Практическое занятие 3. Метод. Передача параметров. Переключатель Загальні засади медіапедагогіки
Загальні засади медіапедагогіки Система автономной навигации антропоморфного робота
Система автономной навигации антропоморфного робота Информационные процессы
Информационные процессы Ур. 25
Ур. 25 Кодирование информации с помощью знаковых систем
Кодирование информации с помощью знаковых систем Презентация "Устройство компьютера 3 класс" - скачать презентации по Информатике
Презентация "Устройство компьютера 3 класс" - скачать презентации по Информатике Компьютерная графика
Компьютерная графика Способы представления криволинейных поверхностей
Способы представления криволинейных поверхностей Сетевые службы. Кластеры
Сетевые службы. Кластеры Презентация "Кодирование текстовой информации 6 класс" - скачать презентации по Информатике
Презентация "Кодирование текстовой информации 6 класс" - скачать презентации по Информатике Управление задачами
Управление задачами Язык запросов к реляционным базам данных
Язык запросов к реляционным базам данных Интерактивные возможности PowerPoint
Интерактивные возможности PowerPoint Антивирусные программы
Антивирусные программы Двоичное кодирование графической и звуковой информации
Двоичное кодирование графической и звуковой информации  Jira Advanced - Module 1
Jira Advanced - Module 1 Презентация "Экспертные системы. Технология разработки. Этап формализации" - скачать презентации по Информатике
Презентация "Экспертные системы. Технология разработки. Этап формализации" - скачать презентации по Информатике Проектирование и разработка программно-информационной обучающей системы
Проектирование и разработка программно-информационной обучающей системы How to apply NLA-5&15S Preset
How to apply NLA-5&15S Preset