- Системы передачи измерительной информации - пневмоэлектрические

Содержание
- 2. Пневмоэлектрические преобразователи Пневмоэлектрические преобразователи – измерительные преобразователи, предназначенные для преобразования непрерывного унифицированного пневматического сигнала в непрерывный
- 3. Здесь: 1 – одновитковая трубчатая пружина; 2 – пружина; 3 – рычаг; 4 – металлический флажок;
- 4. Преобразуемый пневматический сигнал Рвх поступает в одновитковую трубчатую пружину 1, которая, под действием давления, например, при
- 5. Рассмотрим структурную схему пневмоэлектрического преобразователя (рис. 2). Рис. 2. Структурная схема пневмоэлектрического преобразователя
- 7. На элементе сравнения (рычаг 3) вырабатывается разность: Если
- 8. В этом случае где
- 9. тогда откуда где
- 10. Курс «Современные средства контроля и управления» Лекция «Системы передачи измерительной информации - электропневматические»
- 11. Электропневматические преобразователи Электропневматические преобразователи необходимы в тех случаях, когда в пневматическую систему управления требуется ввести информацию
- 12. Рис. 1. Принципиальная схема электропневматического преобразователя Здесь: 1 – постоянный магнит; 2 – катушка; 3 –
- 13. В ЭПП, построенном на этом принципе (рис. 1), входной унифицированный сигнал Iвх поступает на катушку 2
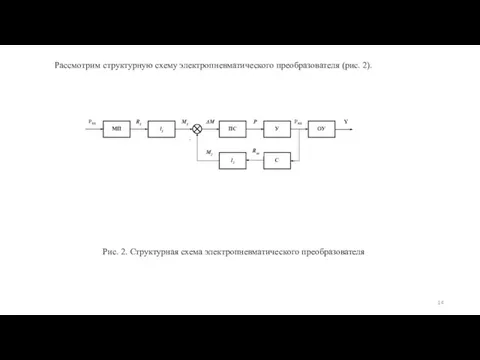
- 14. Рассмотрим структурную схему электропневматического преобразователя (рис. 2). Рис. 2. Структурная схема электропневматического преобразователя
- 16. На элементе сравнения (рычаг 3) вырабатывается разность: Если
- 17. Система приходит в равновесие, когда Или где
- 19. Скачать презентацию
Пневмоэлектрические преобразователи
Пневмоэлектрические преобразователи – измерительные преобразователи, предназначенные для преобразования непрерывного унифицированного
Пневмоэлектрические преобразователи
Пневмоэлектрические преобразователи – измерительные преобразователи, предназначенные для преобразования непрерывного унифицированного
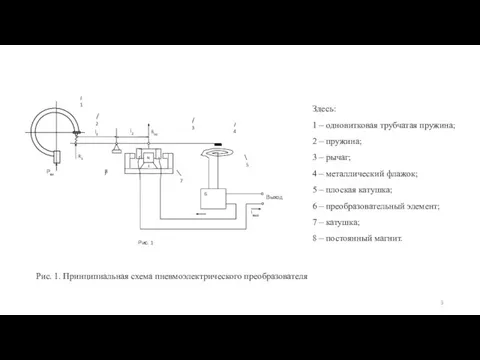
Здесь:
1 – одновитковая трубчатая пружина;
2 – пружина;
3 – рычаг;
4 – металлический
Здесь:
1 – одновитковая трубчатая пружина;
2 – пружина;
3 – рычаг;
4 – металлический
Преобразуемый пневматический сигнал Рвх поступает в одновитковую трубчатую пружину 1, которая,
Преобразуемый пневматический сигнал Рвх поступает в одновитковую трубчатую пружину 1, которая,
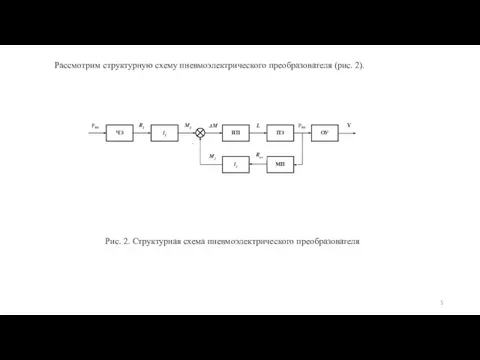
Рассмотрим структурную схему пневмоэлектрического преобразователя (рис. 2).
Рис. 2. Структурная схема пневмоэлектрического
Рассмотрим структурную схему пневмоэлектрического преобразователя (рис. 2).
Рис. 2. Структурная схема пневмоэлектрического


На элементе сравнения (рычаг 3) вырабатывается разность:
Если
На элементе сравнения (рычаг 3) вырабатывается разность:
Если

В этом случае
где
В этом случае
где

тогда
откуда
где
тогда
откуда
где
Курс «Современные средства контроля
и управления»
Лекция
«Системы передачи измерительной информации - электропневматические»
Курс «Современные средства контроля
и управления»
Лекция
«Системы передачи измерительной информации - электропневматические»
Электропневматические преобразователи
Электропневматические преобразователи необходимы в тех случаях, когда в пневматическую систему
Электропневматические преобразователи
Электропневматические преобразователи необходимы в тех случаях, когда в пневматическую систему
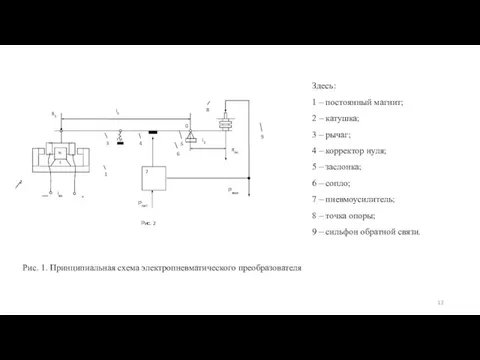
Рис. 1. Принципиальная схема электропневматического преобразователя
Здесь:
1 – постоянный магнит;
2 – катушка;
3
Рис. 1. Принципиальная схема электропневматического преобразователя
Здесь:
1 – постоянный магнит;
2 – катушка;
3
В ЭПП, построенном на этом принципе (рис. 1), входной унифицированный сигнал
В ЭПП, построенном на этом принципе (рис. 1), входной унифицированный сигнал
Рассмотрим структурную схему электропневматического преобразователя (рис. 2).
Рис. 2. Структурная схема электропневматического
Рассмотрим структурную схему электропневматического преобразователя (рис. 2).
Рис. 2. Структурная схема электропневматического

На элементе сравнения (рычаг 3) вырабатывается разность:
Если
На элементе сравнения (рычаг 3) вырабатывается разность:
Если

Система приходит в равновесие, когда
Или
где
Система приходит в равновесие, когда
Или
где
 АбитБот. Чат-бот для абитуриентов
АбитБот. Чат-бот для абитуриентов Специальность: Техническое обслуживание средств вычислительной техники и компьютерных сетей Группа: ОВТ-466 Студент: Роман
Специальность: Техническое обслуживание средств вычислительной техники и компьютерных сетей Группа: ОВТ-466 Студент: Роман Практика. Создаем общий контейнер
Практика. Создаем общий контейнер Программное обеспечение для САПР проектной организации: альтернативные решения и критерии оценки
Программное обеспечение для САПР проектной организации: альтернативные решения и критерии оценки Геоаналитика. Сервисы для ритейла и FMCG
Геоаналитика. Сервисы для ритейла и FMCG Способы передачи электронных документов
Способы передачи электронных документов БЕЗОПАСНОСТЬ В СЕТИ ИНТЕРНЕТ
БЕЗОПАСНОСТЬ В СЕТИ ИНТЕРНЕТ  Разработка плана действий и его запись. Задачи о переправах
Разработка плана действий и его запись. Задачи о переправах Linux Virtual Filesystem
Linux Virtual Filesystem Введение в информатику
Введение в информатику  Будущее в видеоиграх: социальные проблемы
Будущее в видеоиграх: социальные проблемы Методы сбора информации
Методы сбора информации Практикум “Неизбежный Инстаграм!
Практикум “Неизбежный Инстаграм! Краткий обзор. Семейство ОС Linux. Дистрибутив Ubuntu
Краткий обзор. Семейство ОС Linux. Дистрибутив Ubuntu Двоичная арифметика
Двоичная арифметика Использование современных программных комплексов обработки данных дистанционного зондирования земли
Использование современных программных комплексов обработки данных дистанционного зондирования земли Процессы и их поддержка в операционной системе
Процессы и их поддержка в операционной системе Использование программы Inkscape семейства OpenSource в учебном процессе
Использование программы Inkscape семейства OpenSource в учебном процессе Functional Program
Functional Program Проектирование реляционных баз данных на основе принципов нормализации. (Лекция 6)
Проектирование реляционных баз данных на основе принципов нормализации. (Лекция 6) MPS (Managed Print Service - управляемый сервис печати)
MPS (Managed Print Service - управляемый сервис печати) OSINT-инструмент для сбора данных о человеке
OSINT-инструмент для сбора данных о человеке Оcнови роботи в пакеті Scilab
Оcнови роботи в пакеті Scilab Работа с текстом
Работа с текстом Кодирование информации
Кодирование информации Кадровое делопроизводство и стандартизация труда
Кадровое делопроизводство и стандартизация труда Путешествие в страну Инфознайка
Путешествие в страну Инфознайка Сортировки. Оценка алгоритмов сортировки
Сортировки. Оценка алгоритмов сортировки