- Геометрические образы, автоматных отображений

Содержание
- 2. ЦЕЛЬ РАБОТЫ Проведение вычислительных экспериментов, а именно, построение проекций автоматных отображений Евклидовой плоскости, представленными геометрическими образами
- 3. БАЗОВЫЕ ПОНЯТИЯ
- 4. БАЗОВЫЕ ПОНЯТИЯ
- 5. АВТОМАТНЫЕ ОТОБРАЖЕНИЯ, ЗАДАННЫЕ С ПОМОЩЬЮ ГЕОМЕТРИЧЕСКИХ ОБРАЗОВ
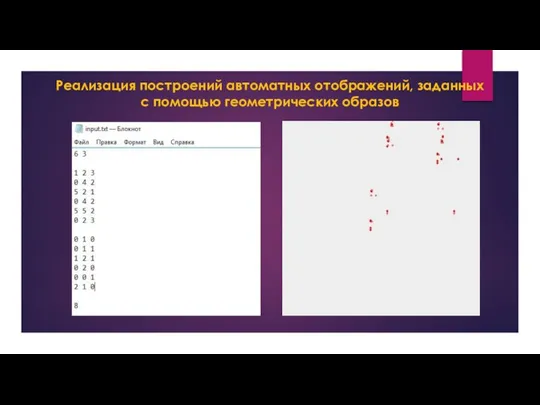
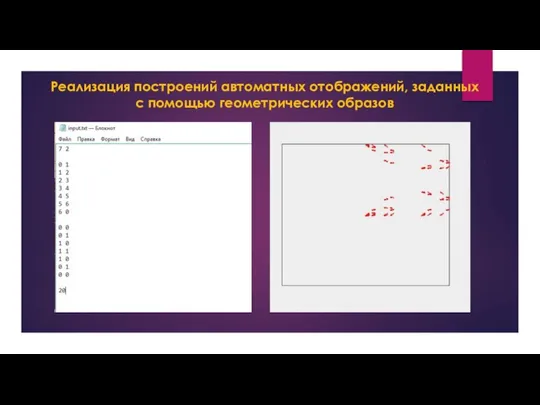
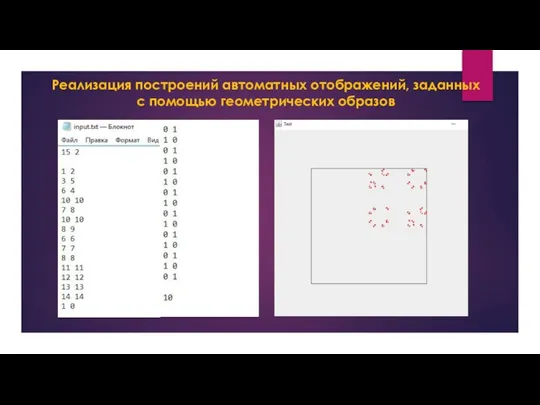
- 6. Реализация построений автоматных отображений, заданных с помощью геометрических образов Алгоритм работы программы: Программа считывает автомат в
- 7. Реализация построений автоматных отображений, заданных с помощью геометрических образов
- 8. Реализация построений автоматных отображений, заданных с помощью геометрических образов
- 9. Реализация построений автоматных отображений, заданных с помощью геометрических образов
- 10. Реализация построений автоматных отображений, заданных с помощью геометрических образов
- 11. Реализация построений автоматных отображений, заданных с помощью геометрических образов
- 12. Реализация построений автоматных отображений, заданных с помощью геометрических образов
- 13. ВЫВОД В результате выполнения данного курсового проекта был разработан программный продукт, при помощи которого можно увидеть
- 14. СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ 1. Л. Б. Тяпаев. Решение некоторых задач для конечных автоматов. // Известия Саратовского
- 16. Скачать презентацию

ЦЕЛЬ РАБОТЫ
Проведение вычислительных экспериментов, а именно, построение проекций автоматных отображений Евклидовой
ЦЕЛЬ РАБОТЫ
Проведение вычислительных экспериментов, а именно, построение проекций автоматных отображений Евклидовой
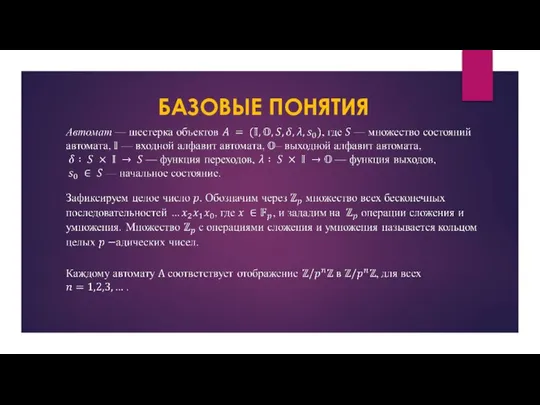
БАЗОВЫЕ ПОНЯТИЯ
БАЗОВЫЕ ПОНЯТИЯ

БАЗОВЫЕ ПОНЯТИЯ
БАЗОВЫЕ ПОНЯТИЯ
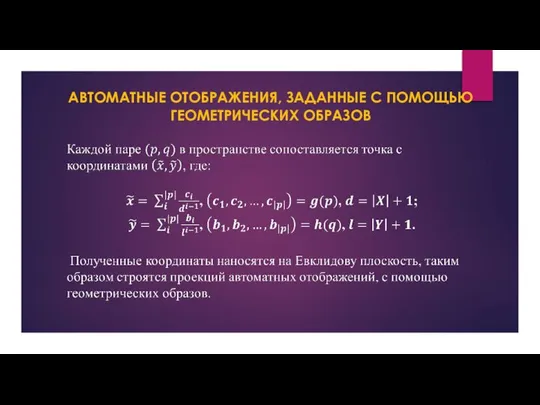
АВТОМАТНЫЕ ОТОБРАЖЕНИЯ, ЗАДАННЫЕ С ПОМОЩЬЮ ГЕОМЕТРИЧЕСКИХ ОБРАЗОВ
АВТОМАТНЫЕ ОТОБРАЖЕНИЯ, ЗАДАННЫЕ С ПОМОЩЬЮ ГЕОМЕТРИЧЕСКИХ ОБРАЗОВ

Реализация построений автоматных отображений, заданных с помощью геометрических образов
Алгоритм работы программы:
Программа
Реализация построений автоматных отображений, заданных с помощью геометрических образов
Алгоритм работы программы:
Программа

Реализация построений автоматных отображений, заданных с помощью геометрических образов
Реализация построений автоматных отображений, заданных с помощью геометрических образов

Реализация построений автоматных отображений, заданных с помощью геометрических образов
Реализация построений автоматных отображений, заданных с помощью геометрических образов
Реализация построений автоматных отображений, заданных с помощью геометрических образов
Реализация построений автоматных отображений, заданных с помощью геометрических образов

Реализация построений автоматных отображений, заданных с помощью геометрических образов
Реализация построений автоматных отображений, заданных с помощью геометрических образов
Реализация построений автоматных отображений, заданных с помощью геометрических образов
Реализация построений автоматных отображений, заданных с помощью геометрических образов
Реализация построений автоматных отображений, заданных с помощью геометрических образов
Реализация построений автоматных отображений, заданных с помощью геометрических образов

ВЫВОД
В результате выполнения данного курсового проекта был разработан программный продукт, при
ВЫВОД
В результате выполнения данного курсового проекта был разработан программный продукт, при
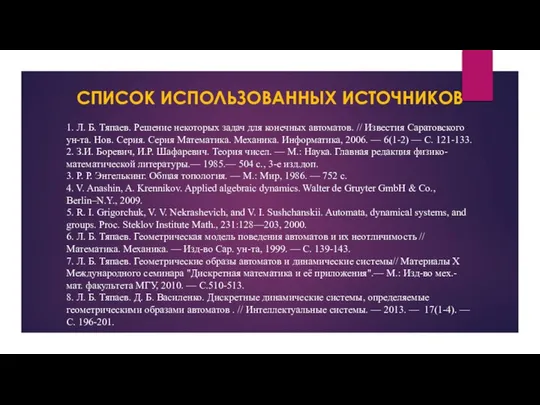
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Л. Б. Тяпаев. Решение некоторых задач для конечных
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Л. Б. Тяпаев. Решение некоторых задач для конечных
 Nonlinear optical phenomena
Nonlinear optical phenomena Тема урока: Раскрытие скобок.
Тема урока: Раскрытие скобок.  Приведение дробей к общему знаменателю, сравнение дробей с разными знаменателями
Приведение дробей к общему знаменателю, сравнение дробей с разными знаменателями Математические методы
Математические методы Правильные многоугольники
Правильные многоугольники Правильные многогранники
Правильные многогранники Математикалық ұғымдарды
Математикалық ұғымдарды Определённый интеграл
Определённый интеграл Задачи к уроку по теме «Параллелограмм», 8 класс
Задачи к уроку по теме «Параллелограмм», 8 класс Решение заданий №6 (прямоугольник) по материалам открытого банка задач ЕГЭ по математике 2016 года
Решение заданий №6 (прямоугольник) по материалам открытого банка задач ЕГЭ по математике 2016 года Презентация по математике "Приложения производной" - скачать
Презентация по математике "Приложения производной" - скачать  Формулы для вычисления площади правильного многоугольника, его стороны и радиуса вписанной окружности
Формулы для вычисления площади правильного многоугольника, его стороны и радиуса вписанной окружности Состав числа 16
Состав числа 16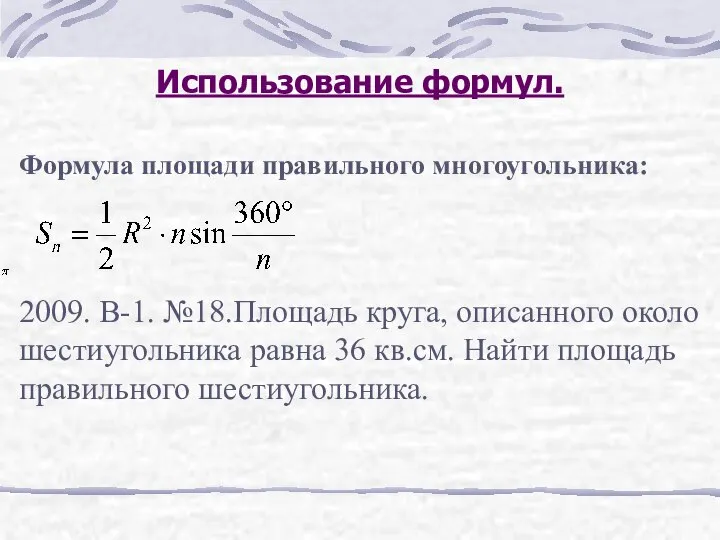 Решение задач по геометрии
Решение задач по геометрии Проверка статистических гипотез
Проверка статистических гипотез Урок-путешествие. Линейная функция и её график
Урок-путешествие. Линейная функция и её график Сложение и вычитание смешанных чисел. 5 класс
Сложение и вычитание смешанных чисел. 5 класс Транспортир. Измерение углов транспортиром. (5 класс)
Транспортир. Измерение углов транспортиром. (5 класс) Формулы приведения для тупых углов
Формулы приведения для тупых углов Диаграммалар
Диаграммалар Структурные средние. Мода, медиана
Структурные средние. Мода, медиана Экстремумы функции
Экстремумы функции Практические задачи по математике в 6 классе
Практические задачи по математике в 6 классе Сложение однозначных чисел переходом через десяток вида +4
Сложение однозначных чисел переходом через десяток вида +4 Непрерывность функции одной переменной. Точки разрыва функции и их классификация
Непрерывность функции одной переменной. Точки разрыва функции и их классификация График линейного уравнения с двумя переменными
График линейного уравнения с двумя переменными Роль и место математики в современном мире
Роль и место математики в современном мире Осевая симметрия
Осевая симметрия