- Введение в задачи исследования и проектирования цифровых систем. Методы синтеза цифровых систем

Содержание
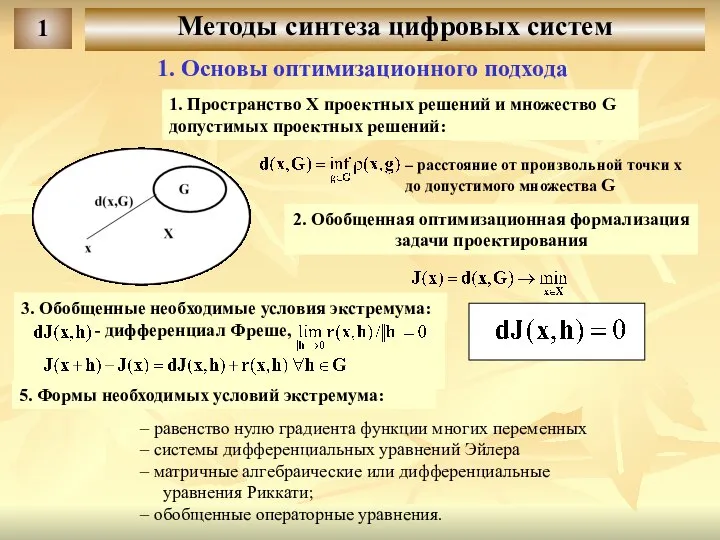
- 2. 1. Пространство X проектных решений и множество G допустимых проектных решений: – расстояние от произвольной точки
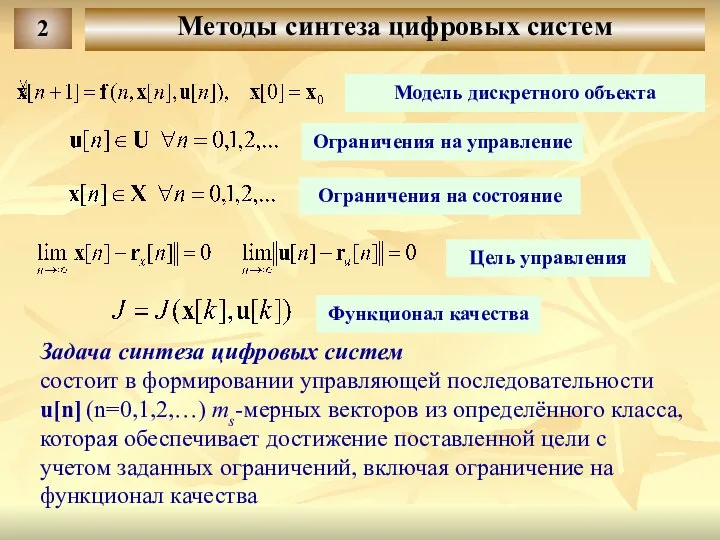
- 3. Модель дискретного объекта Функционал качества Ограничения на состояние Цель управления Задача синтеза цифровых систем состоит в
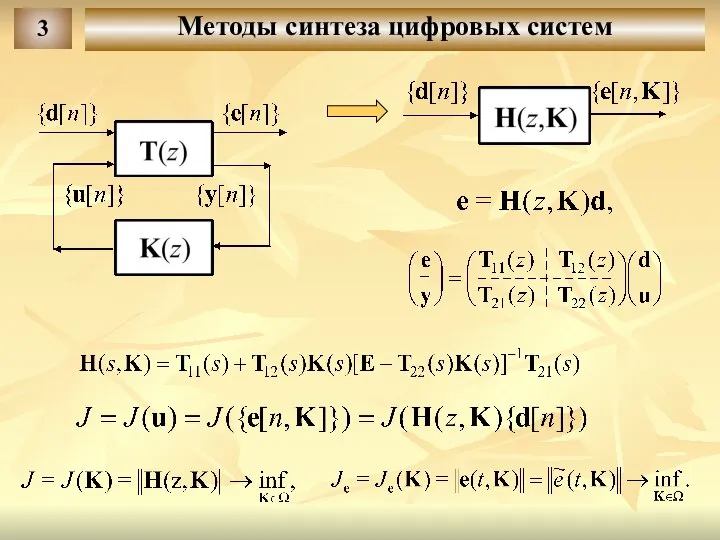
- 4. 3 Методы синтеза цифровых систем
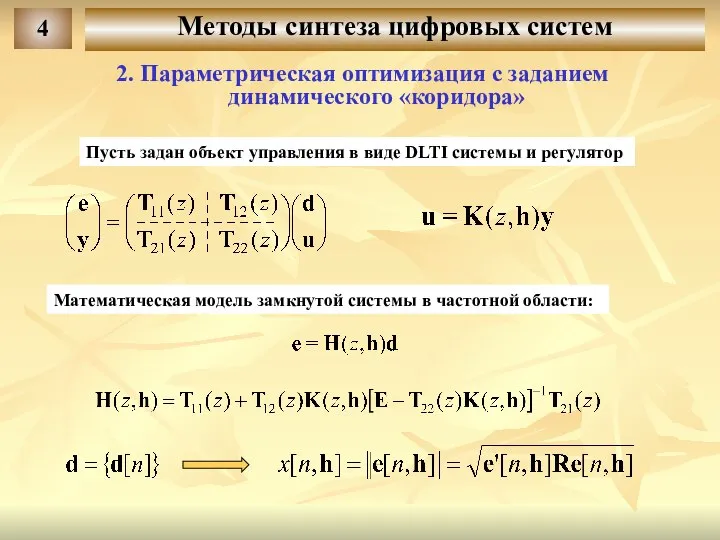
- 5. 4 Методы синтеза цифровых систем Пусть задан объект управления в виде DLTI системы и регулятор Математическая
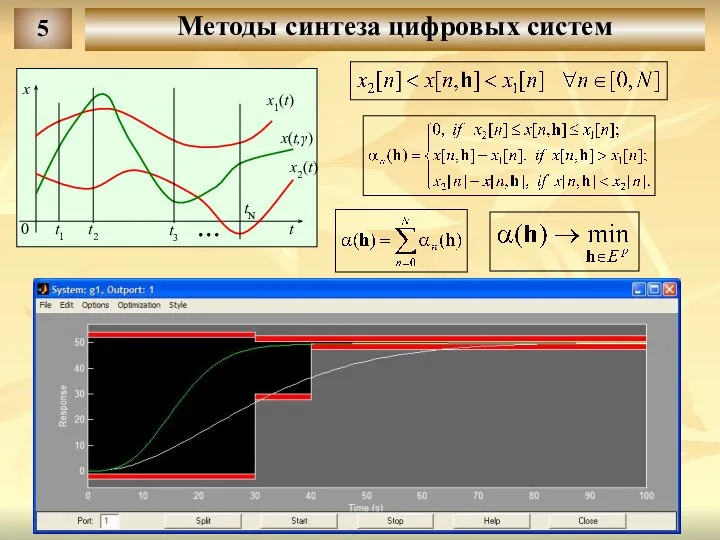
- 6. x1(t) 0 t x2(t) x(t,γ) t1 t2 t3 ... tN x 5 Методы синтеза цифровых систем
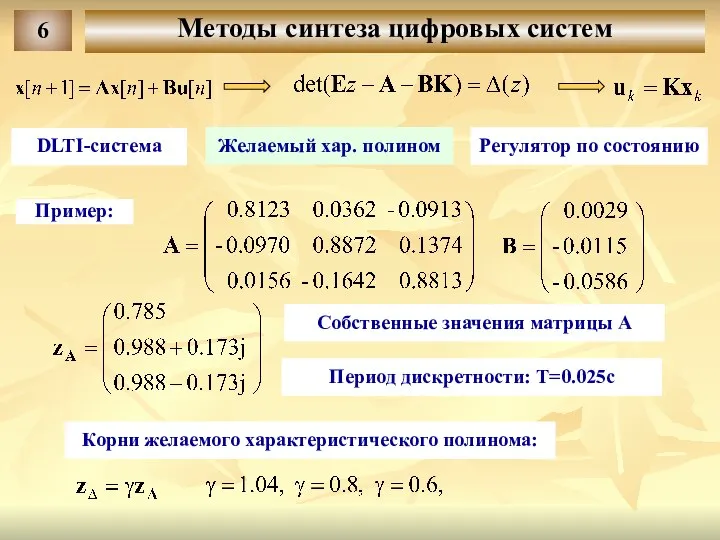
- 7. 6 Методы синтеза цифровых систем DLTI-система Желаемый хар. полином Регулятор по состоянию Пример: Собственные значения матрицы
- 8. Переходные процессы в замкнутой системе для различных величин γ - нормирующий множитель Уравнения замкнутой системы 7
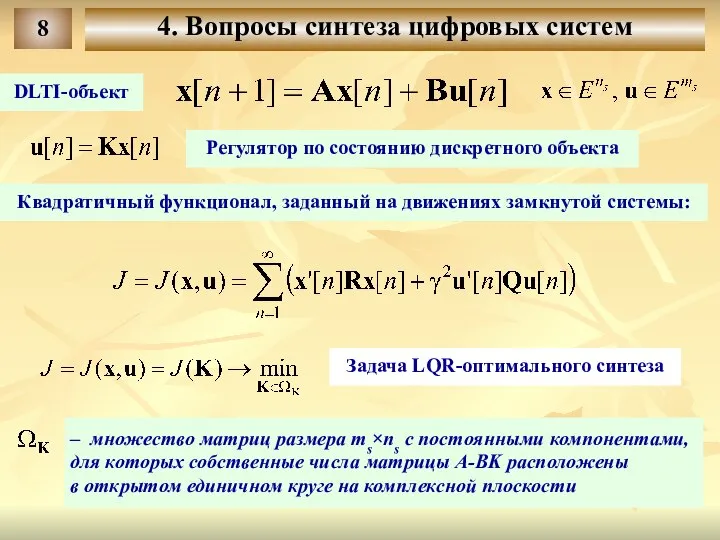
- 9. 8 4. Вопросы синтеза цифровых систем DLTI-объект Квадратичный функционал, заданный на движениях замкнутой системы: Регулятор по
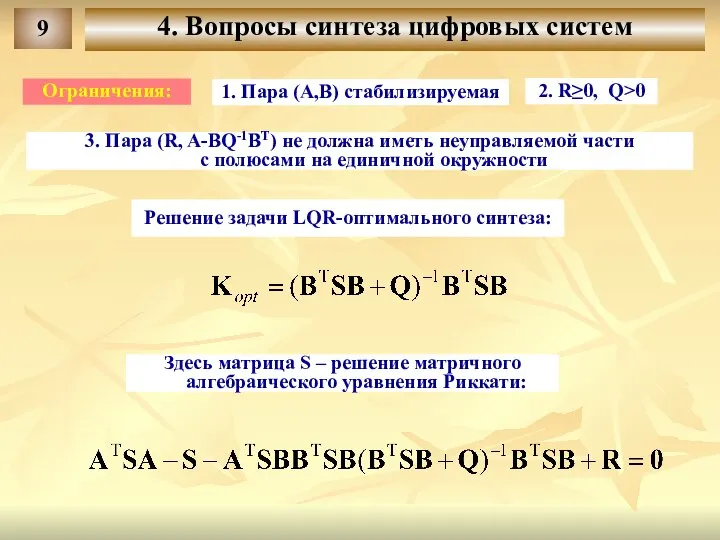
- 10. 9 4. Вопросы синтеза цифровых систем Решение задачи LQR-оптимального синтеза: Здесь матрица S – решение матричного
- 11. Объект: Регулятор: – макс. синг. число для SISO-систем для SISO-систем 10 4. Вопросы синтеза цифровых систем
- 13. Скачать презентацию
1. Пространство X проектных решений и множество G
допустимых проектных решений:
–
1. Пространство X проектных решений и множество G
допустимых проектных решений:
–
Модель дискретного объекта
Функционал качества
Ограничения на состояние
Цель управления
Задача синтеза цифровых систем
состоит в
Модель дискретного объекта
Функционал качества
Ограничения на состояние
Цель управления
Задача синтеза цифровых систем состоит в
3
Методы синтеза цифровых систем
3
Методы синтеза цифровых систем
4
Методы синтеза цифровых систем
Пусть задан объект управления в виде DLTI
4
Методы синтеза цифровых систем
Пусть задан объект управления в виде DLTI
x1(t)
0
t
x2(t)
x(t,γ)
t1
t2
t3
...
tN
x
5
Методы синтеза цифровых систем
x1(t)
0
t
x2(t)
x(t,γ)
t1
t2
t3
...
tN
x
5
Методы синтеза цифровых систем
6
Методы синтеза цифровых систем
DLTI-система
Желаемый хар. полином
Регулятор по состоянию
Пример:
Собственные значения матрицы A
Корни
6
Методы синтеза цифровых систем
DLTI-система
Желаемый хар. полином
Регулятор по состоянию
Пример:
Собственные значения матрицы A
Корни
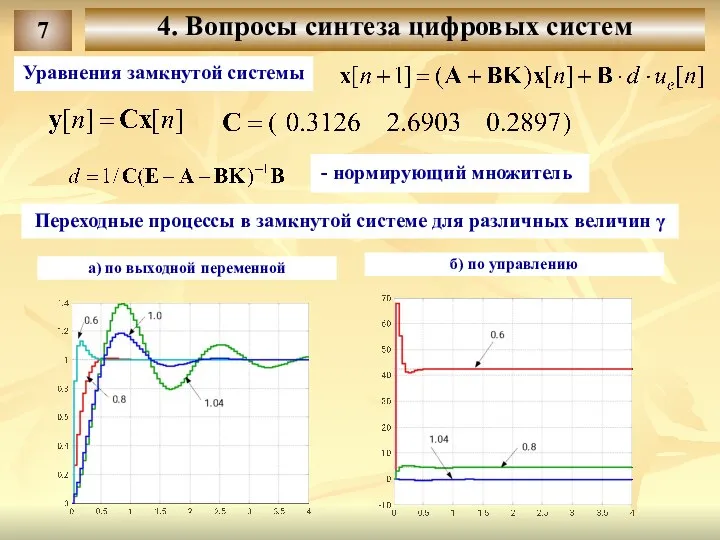
Переходные процессы в замкнутой системе для различных величин γ
- нормирующий множитель
Уравнения
Переходные процессы в замкнутой системе для различных величин γ
- нормирующий множитель
Уравнения
8
4. Вопросы синтеза цифровых систем
DLTI-объект
Квадратичный функционал, заданный на движениях замкнутой системы:
Регулятор
8
4. Вопросы синтеза цифровых систем
DLTI-объект
Квадратичный функционал, заданный на движениях замкнутой системы:
Регулятор
9
4. Вопросы синтеза цифровых систем
Решение задачи LQR-оптимального синтеза:
Здесь матрица S –
9
4. Вопросы синтеза цифровых систем
Решение задачи LQR-оптимального синтеза:
Здесь матрица S –
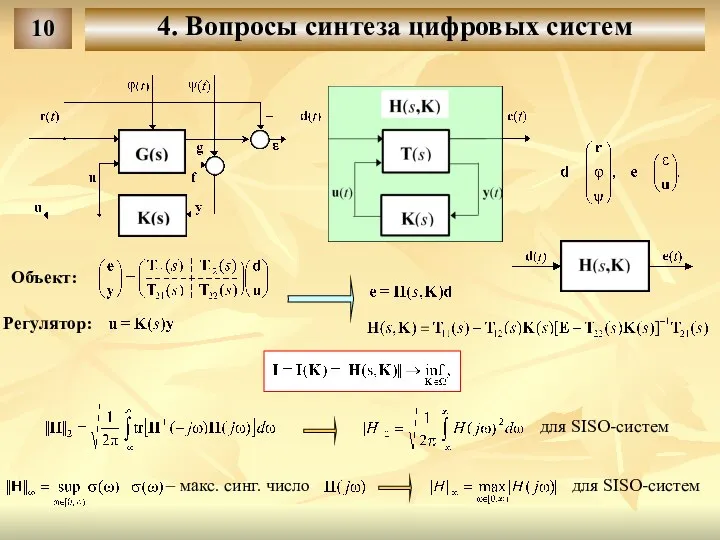
Объект:
Регулятор:
– макс. синг. число
для SISO-систем
для SISO-систем
10
4. Вопросы синтеза цифровых систем
Объект:
Регулятор:
– макс. синг. число
для SISO-систем
для SISO-систем
10
4. Вопросы синтеза цифровых систем
 Системи комп’ютерної математики
Системи комп’ютерної математики Дидактические игры по математике. Найди соседей числа (для дошкольников)
Дидактические игры по математике. Найди соседей числа (для дошкольников) Функции нескольких переменных. (Лекция 2)
Функции нескольких переменных. (Лекция 2) Площади фигур в свете подготовки к ГИА - 9 класс
Площади фигур в свете подготовки к ГИА - 9 класс Сложение и вычитание десятичных дробей. Урок с использованием интерактивной доски
Сложение и вычитание десятичных дробей. Урок с использованием интерактивной доски Презентация по математике "Перевод чисел из десятичной системы счисления в двоичную, восьмеричную и шестнадцатеричную" - ска
Презентация по математике "Перевод чисел из десятичной системы счисления в двоичную, восьмеричную и шестнадцатеричную" - ска Решение задач по теме «Соотношения между сторонами и углами в прямоугольном треугольнике»
Решение задач по теме «Соотношения между сторонами и углами в прямоугольном треугольнике» Основы нечеткой логики
Основы нечеткой логики Свойства тригонометрических функций
Свойства тригонометрических функций Решение задач
Решение задач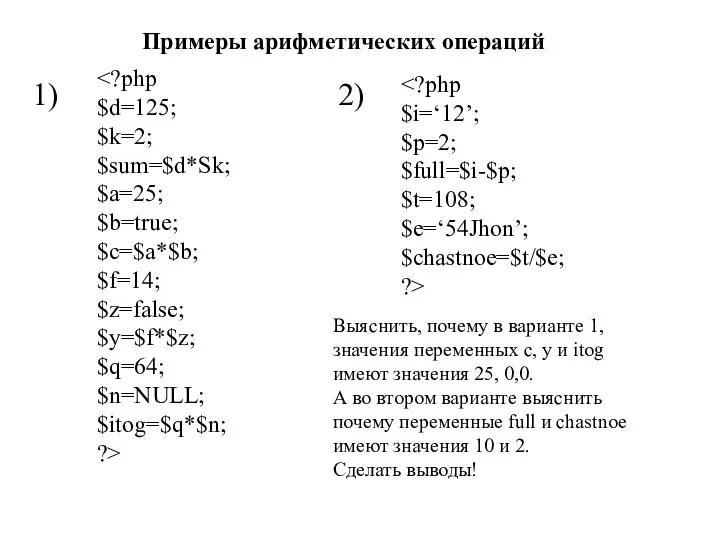 Примеры арифметических операций
Примеры арифметических операций Прибавить 5, 6, 7, 8, 9. Составление таблицы
Прибавить 5, 6, 7, 8, 9. Составление таблицы Факторный анализ
Факторный анализ Множественные совокупности фиктивных переменных
Множественные совокупности фиктивных переменных ТЕМА УРОКА: « Арифметическая прогрессия. Метод математической индукции.»
ТЕМА УРОКА: « Арифметическая прогрессия. Метод математической индукции.»  Векторы. Понятие вектора
Векторы. Понятие вектора Соотношения между сторонами и углами треугольника,
Соотношения между сторонами и углами треугольника, Контроль знаний учащихся на уроках математики
Контроль знаний учащихся на уроках математики Сумма углов треугольника
Сумма углов треугольника Правила вычисления производных
Правила вычисления производных Решение заданий В14 (задачи на движение) по материалам открытого банка задач ЕГЭ
Решение заданий В14 (задачи на движение) по материалам открытого банка задач ЕГЭ Математика. Игра
Математика. Игра Сложение и вычитание многочленов
Сложение и вычитание многочленов Трапеция. Свойства трапеции
Трапеция. Свойства трапеции Равнобедренный треугольник, его свойства
Равнобедренный треугольник, его свойства Лекция 04. О термине «Геометрия»
Лекция 04. О термине «Геометрия» Умножение и деление обыкновенных дробей. Математический диктант
Умножение и деление обыкновенных дробей. Математический диктант УЧИМ СОСТАВ ЧИСЛА от 5 до 10 Автор презентации и текста: Бойкова О.В., учитель начальных классов МОУ СОШ №1 Г. Конаково Тверской о
УЧИМ СОСТАВ ЧИСЛА от 5 до 10 Автор презентации и текста: Бойкова О.В., учитель начальных классов МОУ СОШ №1 Г. Конаково Тверской о