Задачи линейного программирования и их решение в современных вычислительных средах. Лекция №12. Продолжение
- Задачи линейного программирования и их решение в современных вычислительных средах. Лекция №12. Продолжение

Содержание
- 2. Excel: Поиск решения Mathcad: блок Given и функции нахождения оптимума Инструменты решения задач ЛП Matlab: функция
- 3. Решение задачи ЛП в средах Matlab и Mathcad Для решения задачи ЛП в средах Matlab и
- 4. Целевая функция задачи ЛП : . C=С(x1, x2, …, xn)=c1x1+c2x2+….+cnxn Или: n – число переменных модели.
- 5. Пример 1. Стандартная (нормальная) форма задачи ЛП 1. ЦФ => максимум. Ограничения–линейные неравенства (≤) + условие
- 6. Ограничения стандартной формы задачи ЛП в матричном виде Обозначим:
- 7. Пример 2. Транспортная задача На n станциях отправления A1, …, An имеется, соответственно, a1, …, an
- 8. Пример 2. Транспортная задача Расположим исходные данные этой задачи в виде таблицы:
- 9. Пример 2. Транспортная задача Обозначим: xi,k – количество перевезенного груза из пункта Ai в пункт Bk
- 10. Запись ограничений транспортной задачи в матричном виде Пусть t – вектор-столбец из единиц длины n, q
- 11. Решение ⋅задачи ЛП (на примере стандартной формы) в среде Mathcad Задание параметров задачи – присваиванием или
- 12. Ограничение целочисленности х в среде Mathcad Для некоторых версий MathCAD существует пакет расширения SOEP (Solving and
- 14. Скачать презентацию
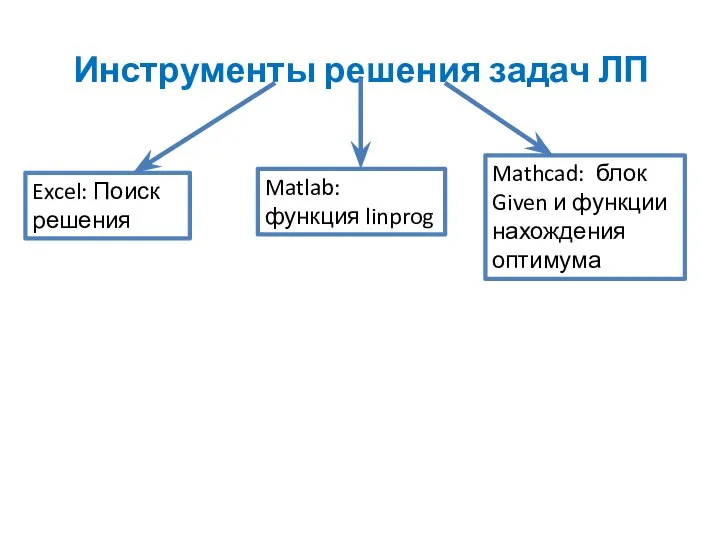
Excel: Поиск решения
Mathcad: блок Given и функции нахождения оптимума
Инструменты решения задач
Excel: Поиск решения
Mathcad: блок Given и функции нахождения оптимума
Инструменты решения задач
Решение задачи ЛП в средах Matlab и Mathcad
Для решения задачи ЛП
Решение задачи ЛП в средах Matlab и Mathcad
Для решения задачи ЛП
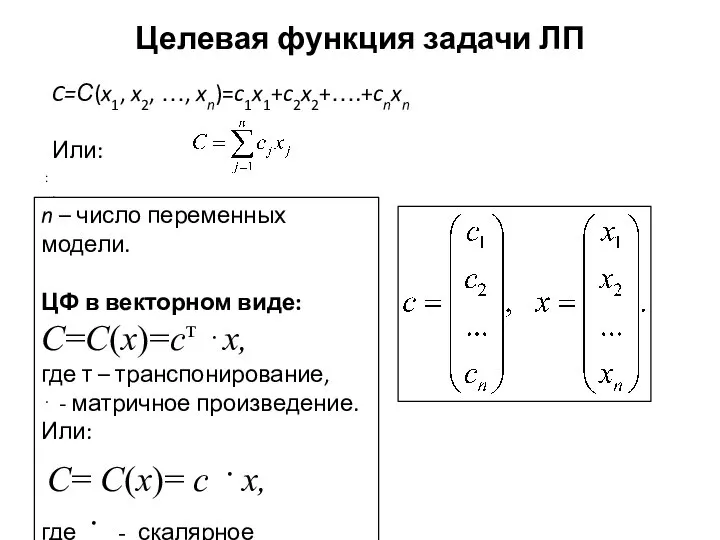
Целевая функция задачи ЛП
:
.
C=С(x1, x2, …, xn)=c1x1+c2x2+….+cnxn
Или:
n – число переменных
Целевая функция задачи ЛП
:
.
C=С(x1, x2, …, xn)=c1x1+c2x2+….+cnxn
Или:
n – число переменных
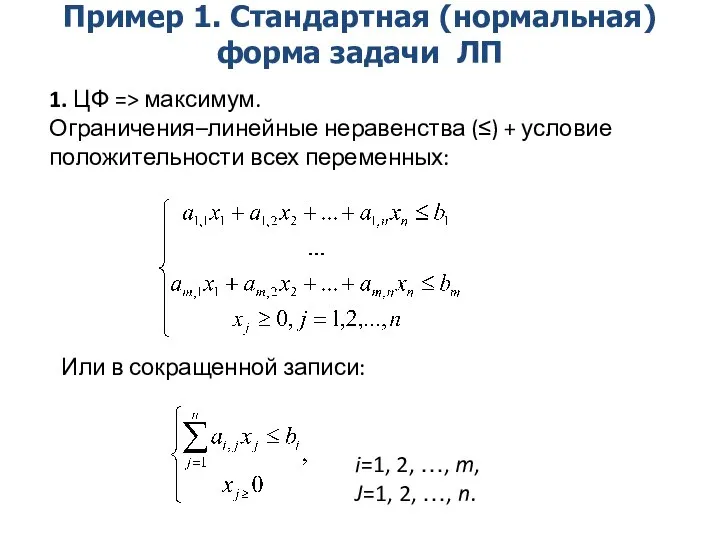
Пример 1. Стандартная (нормальная) форма задачи ЛП
1. ЦФ => максимум.
Ограничения–линейные
Пример 1. Стандартная (нормальная) форма задачи ЛП
1. ЦФ => максимум.
Ограничения–линейные
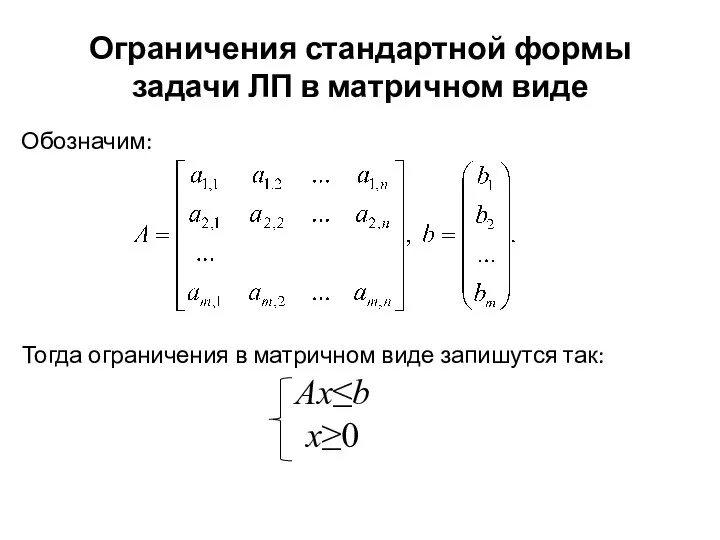
Ограничения стандартной формы задачи ЛП в матричном виде
Обозначим:
Ограничения стандартной формы задачи ЛП в матричном виде
Обозначим:
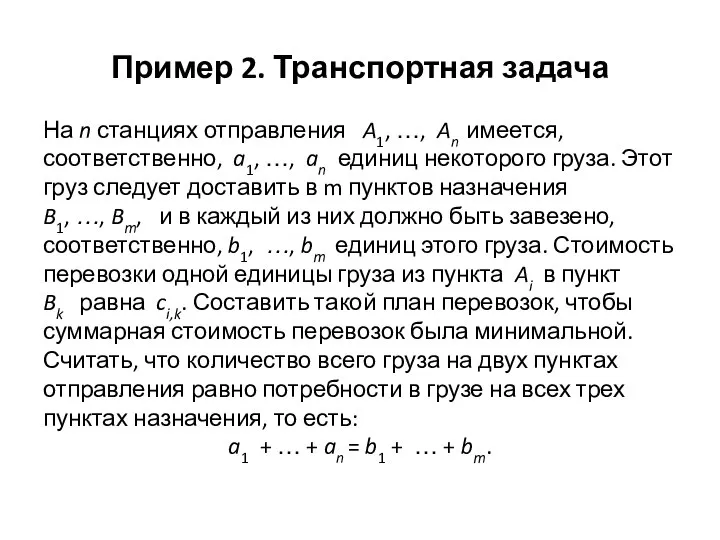
Пример 2. Транспортная задача
На n станциях отправления A1, …, An имеется,
Пример 2. Транспортная задача
На n станциях отправления A1, …, An имеется,
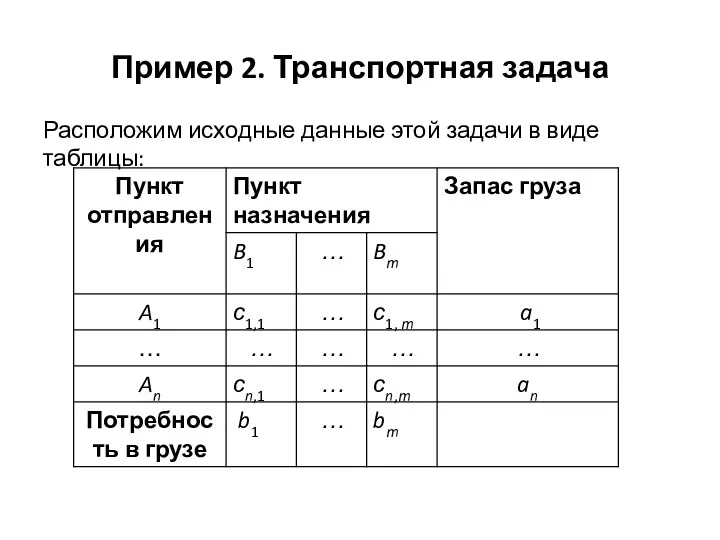
Пример 2. Транспортная задача
Расположим исходные данные этой задачи в виде таблицы:
Пример 2. Транспортная задача
Расположим исходные данные этой задачи в виде таблицы:
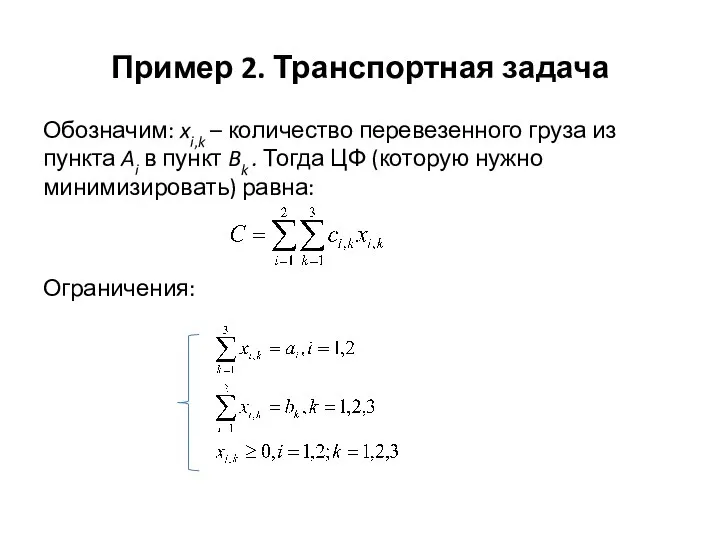
Пример 2. Транспортная задача
Обозначим: xi,k – количество перевезенного груза из пункта
Пример 2. Транспортная задача
Обозначим: xi,k – количество перевезенного груза из пункта
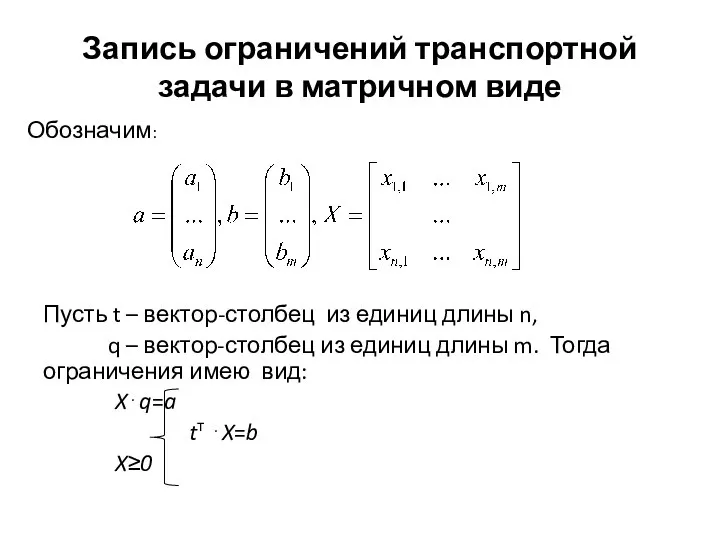
Запись ограничений транспортной задачи в матричном виде
Пусть t – вектор-столбец из
Запись ограничений транспортной задачи в матричном виде
Пусть t – вектор-столбец из
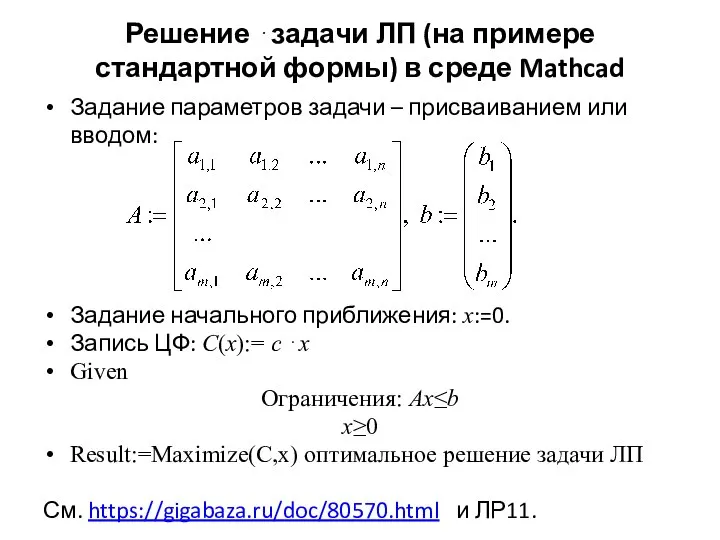
Решение ⋅задачи ЛП (на примере стандартной формы) в среде Mathcad
Задание параметров
Решение ⋅задачи ЛП (на примере стандартной формы) в среде Mathcad
Задание параметров
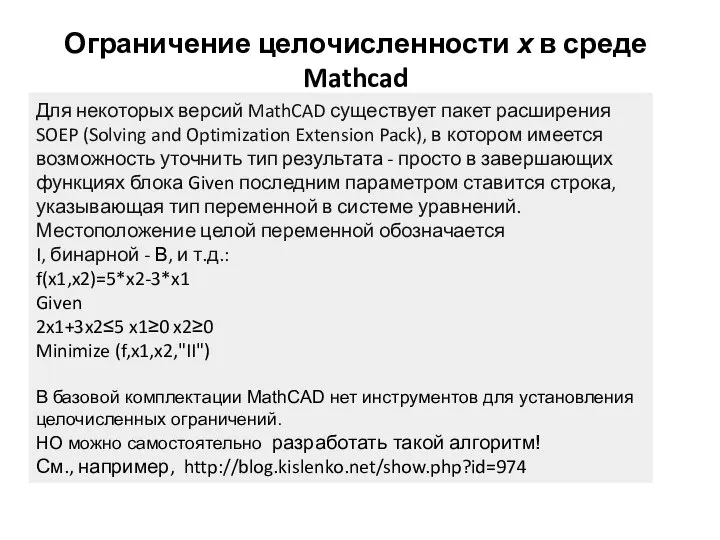
Ограничение целочисленности х в среде Mathcad
Для некоторых версий MathCAD существует пакет
Ограничение целочисленности х в среде Mathcad
Для некоторых версий MathCAD существует пакет
 Планирование экспериментов применительно к объекту исследований
Планирование экспериментов применительно к объекту исследований Проект «Колодец». Деловая игра по теме «Цилиндр»
Проект «Колодец». Деловая игра по теме «Цилиндр» Математикалық поезд
Математикалық поезд Умножение и деление натуральных чисел. 5 класс. Учитель математики: Мишкурова А.И.
Умножение и деление натуральных чисел. 5 класс. Учитель математики: Мишкурова А.И.  Умножаем и делим
Умножаем и делим Окружность и круг
Окружность и круг Статистические методы обработки информации в научных исследованиях
Статистические методы обработки информации в научных исследованиях Решение неравенств с одной переменной. 8 класс. Часть 3
Решение неравенств с одной переменной. 8 класс. Часть 3 Многоугольники в жизни. Квадрат
Многоугольники в жизни. Квадрат Полуфинал. Экономический биатлон. День направления “Экономика и математика”
Полуфинал. Экономический биатлон. День направления “Экономика и математика” Презентация на тему Среднеарифметическое
Презентация на тему Среднеарифметическое  Пентамино
Пентамино Дроби и Проценты Зарецкий Ильяя 5а класс
Дроби и Проценты Зарецкий Ильяя 5а класс  Параллельность прямых
Параллельность прямых Правильные многогранники
Правильные многогранники Золотое сечение в искусстве
Золотое сечение в искусстве Обобщенный эвристический алгоритм
Обобщенный эвристический алгоритм Квадратное уравнение Работу выполнила преподаватель математики Рунгинской средней общеобразовательной школы Комиссарова Л.И.
Квадратное уравнение Работу выполнила преподаватель математики Рунгинской средней общеобразовательной школы Комиссарова Л.И. Развитие понятия числа
Развитие понятия числа Делимость произведения. Урок 99
Делимость произведения. Урок 99 Круг. Окружность. Длина окружности. Площадь круга
Круг. Окружность. Длина окружности. Площадь круга Пропорции и отношения. Тест
Пропорции и отношения. Тест Презентация по математике "Все о числе 7 (...или почти все)" - скачать бесплатно
Презентация по математике "Все о числе 7 (...или почти все)" - скачать бесплатно Презентация по математике "Решение задач с различными величинами" - скачать
Презентация по математике "Решение задач с различными величинами" - скачать  НОВогодняя сказка В СТРАНЕ МАТЕМАТИКИ
НОВогодняя сказка В СТРАНЕ МАТЕМАТИКИ  Свойства степени с натуральным показателем. 8 класс
Свойства степени с натуральным показателем. 8 класс Формулы двойного аргумента
Формулы двойного аргумента Знакомство детей с математическими знаками и монетами
Знакомство детей с математическими знаками и монетами