- Работа САУ 451-03 в режимах Приведение к горизонту, Увод с опасной высоты, Заход на посадку

Содержание
- 2. Тема №16: Системы автоматизированного и автоматического управления Занятие №8: Работа САУ 451-03 в режимах «Приведение к
- 3. Работа САУ в режиме «Приведение к горизонту». Работа САУ в режиме «Увод с опасной высоты». Работа
- 4. Вопрос № 1: Работа САУ в режиме «Приведение к горизонту» Режим «Приведение к горизонту» предназначен для
- 5. Канал стабилизатора Закон управления стабилизатором в режиме ПГ такой же, как в режимах стабилизации углового положения
- 6. Канал элеронов и руля направления Законы управления этих каналов соответствуют стабилизации нулевого угла крена при |γ|
- 7. Вопрос № 2: Работа САУ в режиме «Увод с опасной высоты»
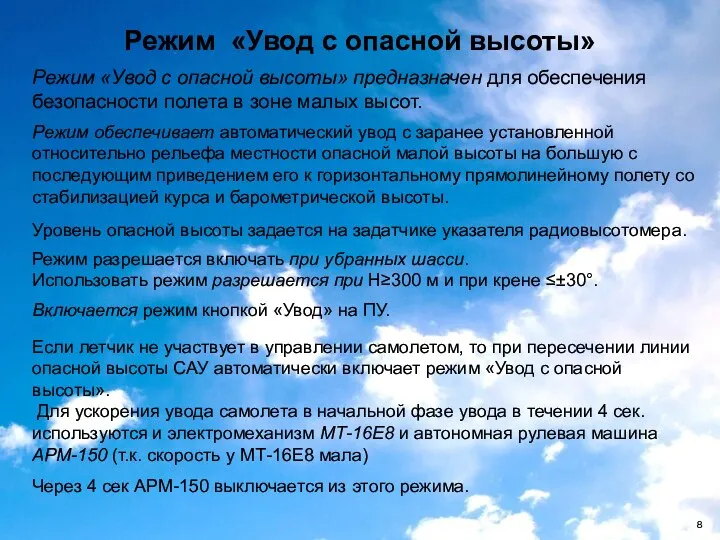
- 8. Режим «Увод с опасной высоты» Режим «Увод с опасной высоты» предназначен для обеспечения безопасности полета в
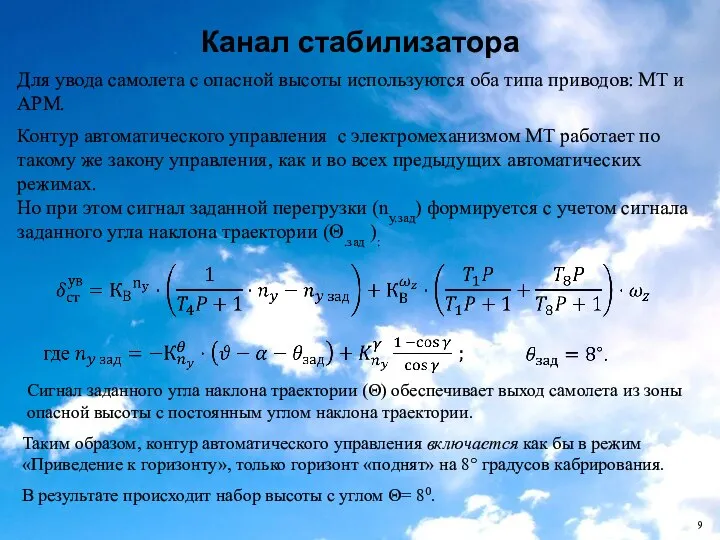
- 9. Канал стабилизатора Для увода самолета с опасной высоты используются оба типа приводов: МТ и АРМ. Контур
- 10. Переходный процесс отклонения стабилизатора при уводе с опасной высоты в результате воздействия обеих приводов САУ -
- 11. Канал элеронов и руля направления Работают в режиме «Увод с опасной высоты» аналогично режиму «Приведение к
- 12. Вопрос №3: Работа САУ в режиме «Заход на посадку» Режим «Заход на посадку» является внешним режимом
- 13. Заход на посадку При автоматическом управлении сигналы от вычислителя САУ поступают на исполнительные устройства АРМ-150 и
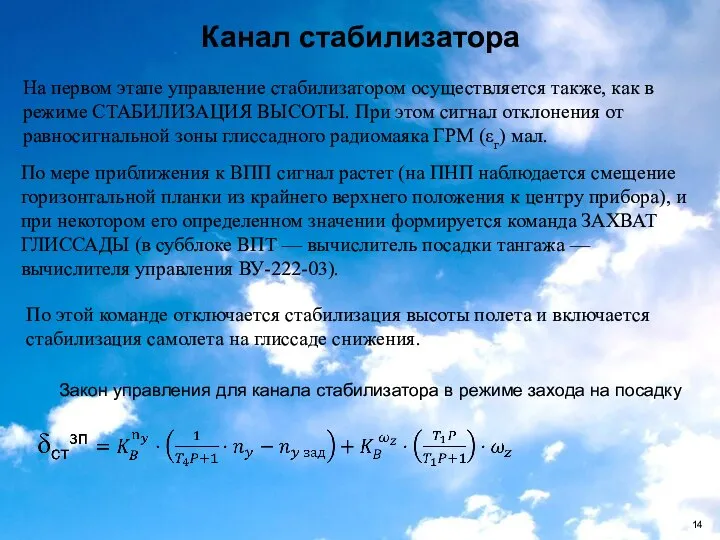
- 14. Канал стабилизатора На первом этапе управление стабилизатором осуществляется также, как в режиме СТАБИЛИЗАЦИЯ ВЫСОТЫ. При этом
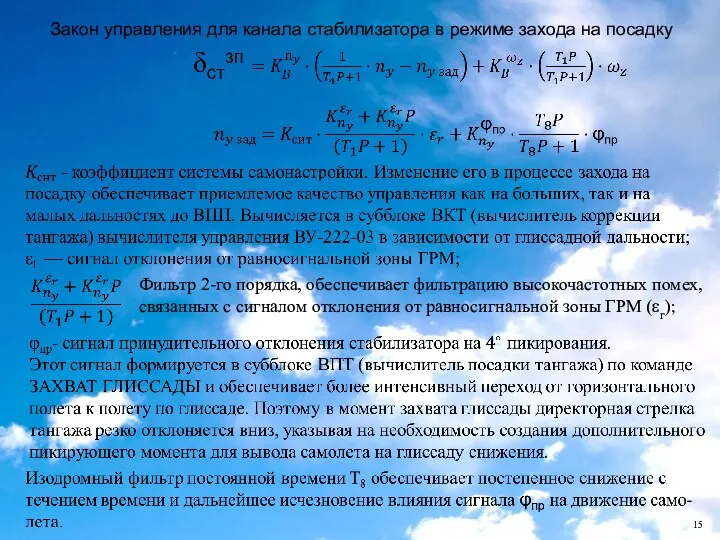
- 15. Фильтр 2-го порядка, обеспечивает фильтрацию высокочастотных помех, связанных с сигналом отклонения от равносигнальной зоны ГРМ (εг);
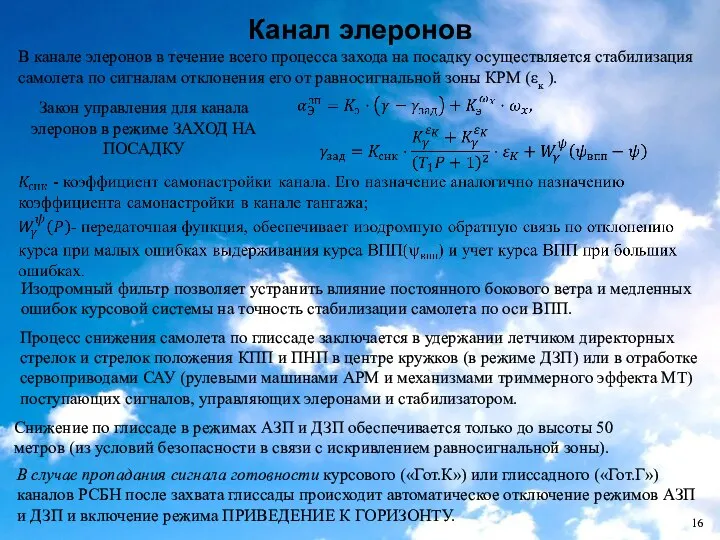
- 16. Канал элеронов В канале элеронов в течение всего процесса захода на посадку осуществляется стабилизация самолета по
- 18. Скачать презентацию
Тема №16:
Системы автоматизированного и автоматического управления
Занятие №8:
Работа САУ 451-03 в
Тема №16:
Системы автоматизированного и автоматического управления
Занятие №8:
Работа САУ 451-03 в
Работа САУ в режиме «Приведение к горизонту».
Работа САУ в режиме «Увод
Работа САУ в режиме «Приведение к горизонту».
Работа САУ в режиме «Увод
Вопрос № 1: Работа САУ в режиме
«Приведение к горизонту»
Режим «Приведение
Вопрос № 1: Работа САУ в режиме
«Приведение к горизонту»
Режим «Приведение
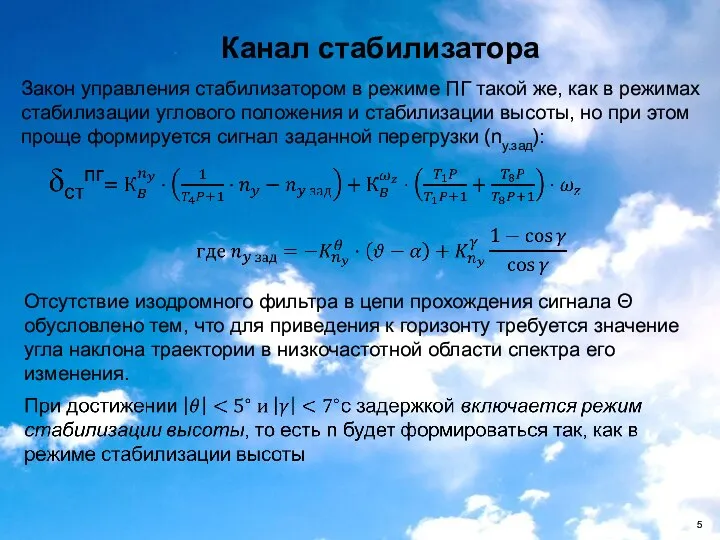
Канал стабилизатора
Закон управления стабилизатором в режиме ПГ такой же, как в
Канал стабилизатора
Закон управления стабилизатором в режиме ПГ такой же, как в
Канал элеронов и руля направления
Законы управления этих каналов соответствуют стабилизации нулевого
Канал элеронов и руля направления
Законы управления этих каналов соответствуют стабилизации нулевого
Вопрос № 2:
Работа САУ в режиме
«Увод с опасной высоты»
Вопрос № 2:
Работа САУ в режиме
«Увод с опасной высоты»
Режим «Увод с опасной высоты»
Режим «Увод с опасной высоты» предназначен для
Режим «Увод с опасной высоты»
Режим «Увод с опасной высоты» предназначен для
Канал стабилизатора
Для увода самолета с опасной высоты используются оба типа приводов:
Канал стабилизатора
Для увода самолета с опасной высоты используются оба типа приводов:
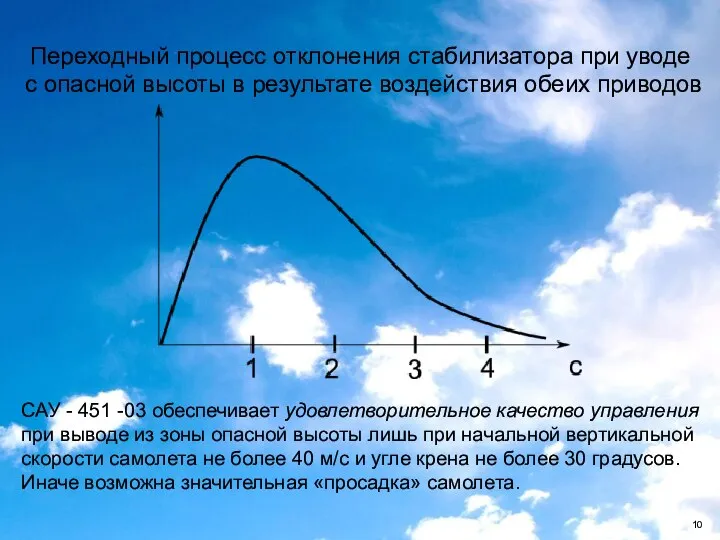
Переходный процесс отклонения стабилизатора при уводе с опасной высоты в результате
Переходный процесс отклонения стабилизатора при уводе с опасной высоты в результате
Канал элеронов и руля направления
Работают в режиме «Увод с опасной высоты»
Канал элеронов и руля направления
Работают в режиме «Увод с опасной высоты»
Вопрос №3:
Работа САУ в режиме «Заход на посадку»
Режим «Заход на
Вопрос №3:
Работа САУ в режиме «Заход на посадку»
Режим «Заход на
Заход на посадку
При автоматическом управлении сигналы от вычислителя САУ поступают на
Заход на посадку
При автоматическом управлении сигналы от вычислителя САУ поступают на
Канал стабилизатора
На первом этапе управление стабилизатором осуществляется также, как в режиме
Канал стабилизатора
На первом этапе управление стабилизатором осуществляется также, как в режиме
Фильтр 2-го порядка, обеспечивает фильтрацию высокочастотных помех, связанных с сигналом отклонения
Фильтр 2-го порядка, обеспечивает фильтрацию высокочастотных помех, связанных с сигналом отклонения
Канал элеронов
В канале элеронов в течение всего процесса захода на посадку
Канал элеронов
В канале элеронов в течение всего процесса захода на посадку
 Биполярные транзисторы
Биполярные транзисторы Мосты дружбы, Краснокамский район
Мосты дружбы, Краснокамский район Распределение комплектов машин по объектам (лекция 14, 15, 16)
Распределение комплектов машин по объектам (лекция 14, 15, 16) Gloucester МТ extra condensed – bolded
Gloucester МТ extra condensed – bolded Состояние и развитие мировой нефтепереработки и рынков нефтепродуктов (лекции)
Состояние и развитие мировой нефтепереработки и рынков нефтепродуктов (лекции) Л.Н.Толстой. Народные рассказы
Л.Н.Толстой. Народные рассказы Ход реализации плана организационных мероприятий по созданию области Ұлытау
Ход реализации плана организационных мероприятий по созданию области Ұлытау Промышленный концерн Adidas AG
Промышленный концерн Adidas AG Лошадка из полимерной глины
Лошадка из полимерной глины 20111108_zagadki_o_lete_chast_2
20111108_zagadki_o_lete_chast_2 Восстановление деталей синтетическими материалами
Восстановление деталей синтетическими материалами Детское сказочное творчество (2)
Детское сказочное творчество (2) Электротехнические работы. Бытовые светильники. Электротехническая арматура
Электротехнические работы. Бытовые светильники. Электротехническая арматура класс чист
класс чист Путешествие в математику (младшая группа)
Путешествие в математику (младшая группа) Организация и технология работы технической пассажирской станции
Организация и технология работы технической пассажирской станции Организация выставок и презентаций
Организация выставок и презентаций Bringing required capabilities and training
Bringing required capabilities and training Соединение деталей на гвоздях
Соединение деталей на гвоздях Заемщики и требования к ним
Заемщики и требования к ним Метод и приёмы работы с различными текстами в изучении истории
Метод и приёмы работы с различными текстами в изучении истории Тік тұндырғыш. Bертикальный отстойник c камерой хлопьеобразования
Тік тұндырғыш. Bертикальный отстойник c камерой хлопьеобразования Управление и связь
Управление и связь Разработка метода и программного модуля управления шестизвенным манипулятором на основе геометрического подхода
Разработка метода и программного модуля управления шестизвенным манипулятором на основе геометрического подхода Этапы проведения мероприятия с участием волонтеров
Этапы проведения мероприятия с участием волонтеров Чем занять ребенка дома в условиях самоизоляции: Игры дома на кухне
Чем занять ребенка дома в условиях самоизоляции: Игры дома на кухне 20120114_stihotvorenie_lermontova
20120114_stihotvorenie_lermontova История транспорта России
История транспорта России