- Основы теории принятия решений. Обзор тем курса ТПР

Содержание
- 2. Часть 1 Обзор тем курса ТПР
- 3. Необходимое условие принятия решений Необходимое условие принятия решений – наличие альтернатив выбора
- 4. Классификация технологий принятия решений Принятие решений Без использования мат. моделей С использованием мат. моделей Таксономия Метод
- 5. Простые решающие правила Уставы (воинские уставы, устав СКГМИ и других университетов, монастырские уставы…). Привести примеры самостоятельно.
- 6. Таксономия Типы задач таксономии: Объединение статичных объектов в таксоны по «похожести». Объединение статичных объектов в заданное
- 7. Метод бинарных отношений Основная задача метода бинарных отношений – ранжирование объектов на основании качественных данных о
- 8. Использование теории полезности Полезность богатства: Цель: дать количественную оценку отношениям предпочтения. Б П
- 9. Принятие решений голосованием Решаемые задачи: Способы организации голосования. Способы подведения итогов голосования Технология прогнозирования итогов голосования.
- 10. Метод эталонов Решаемые задачи: Ранжирование многокритериальных объектов. Обработка экспертных оценок. Подведение итогов голосования. Прогнозирование персональной успеваемости
- 11. Имитационное моделирование Электрическая схема Математическая модель А R1 R2 R3 Rn U - + I
- 12. Игровое моделирование Выбор метода обучения Матричная антагонистическая игра двух преподавателем лиц
- 13. Оптимизационные задачи с непрерывно меняющимися переменными Задача о консервной банке R H
- 14. Оптимизационные задачи с дискретно меняющимися переменными Задача о ранце V V1;C1 V2;C2 V3;C3 V4;C4 Vn;Cn
- 15. Повторить самостоятельно курсы: Теория графов Теория множеств Математическая логика Методы оптимизации Мат. анализ
- 16. Часть 2 Простые алгоритмы таксономии
- 17. Алгоритм Прима На взвешенном неориентированном графе выбирается произвольная вершина. Выбирается вершина, расстояние до которой от исходной
- 18. Пример работы алгоритма Прима 5 7 3 4 1 Исходный граф G(X,U) 2 9 Стартовая вершина
- 19. Пример работы алгоритма Прима 2 1 5 3,4 2 5 4 2 Выбранная вершина 2 5
- 20. Минимальный остов графа G(X,U) 1 5 3 4 2 3 4 S=10 1 2
- 21. Интерфейс Программной реализации алгоритма Прима 1 Ввод матрицы смежности вершин неориентированного взвешенного графа G(X,U) Построить граф
- 22. Интерфейс Программной реализации алгоритма Прима 2 Вывод минимального остова исходного графа G(X,U). Суммарный вес ребер остова.
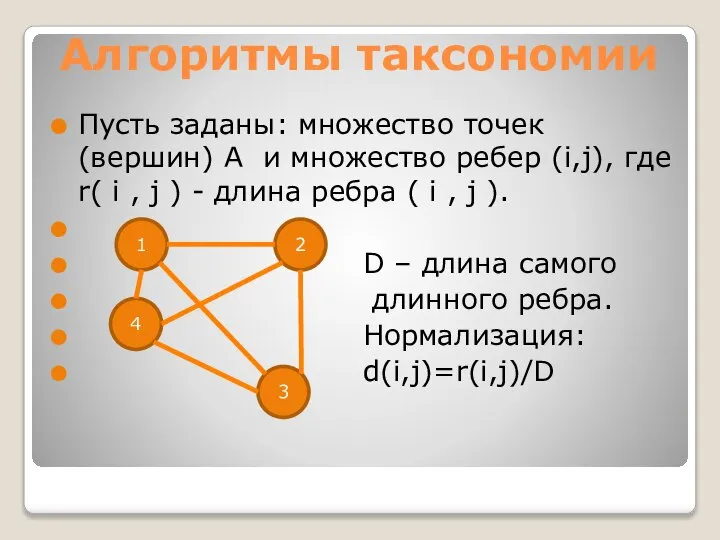
- 23. Алгоритмы таксономии Пусть заданы: множество точек (вершин) А и множество ребер (i,j), где r( i ,
- 24. Определение λ - расстояний Шаг 1.Выбирается любая, ранее не просматривавшаяся пара точек p и q. Если
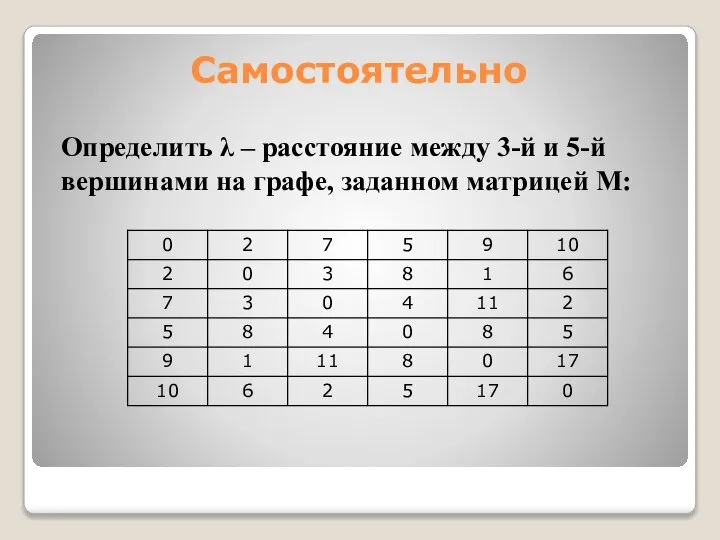
- 25. Самостоятельно Определить λ – расстояние между 3-й и 5-й вершинами на графе, заданном матрицей М:
- 26. Гипотеза λ - компактности Гипотеза λ - компактности формулируется следующим образом: реализация одного и того же
- 27. САМОСТОЯТЕЛЬНО Объединить в таксоны в λ - пространстве трёх учеников - отличника, хорошиста и двоечника (по
- 28. Назначение и свойства алгоритма Forel 1 1. Алгоритм Forel 1 предназначен для разбиения объектов на таксоны.
- 29. Forel-1 (шаги 1 – 5) Шаг 1. Все признаки объектов нормируются так, чтобы их значения были
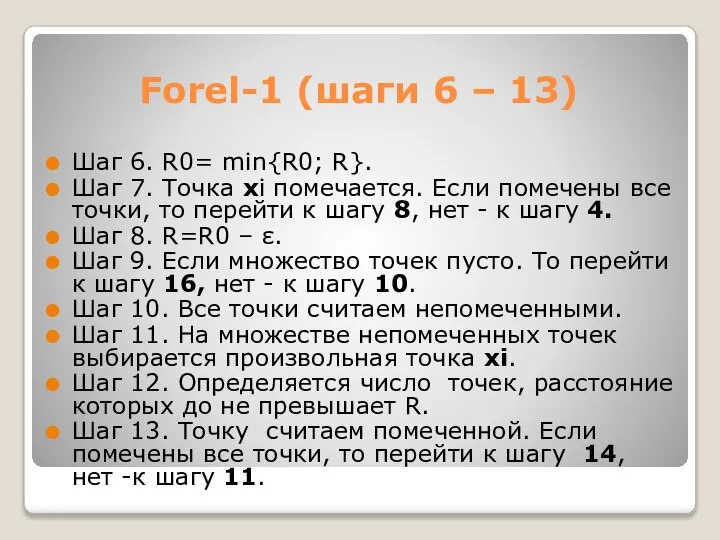
- 30. Forel-1 (шаги 6 – 13) Шаг 6. R0= min{R0; R}. Шаг 7. Точка xi помечается. Если
- 31. Forel-1 (шаги 14 – 16) Шаг 14. Выбор j-й точки, для которой величина P(j) минимальна. Шаг
- 32. Достоинства и недостатки алгоритма Forel 1 Достоинства: Простота. Легкость программной реализации. Недостатки: Зависимость таксономии от выбора
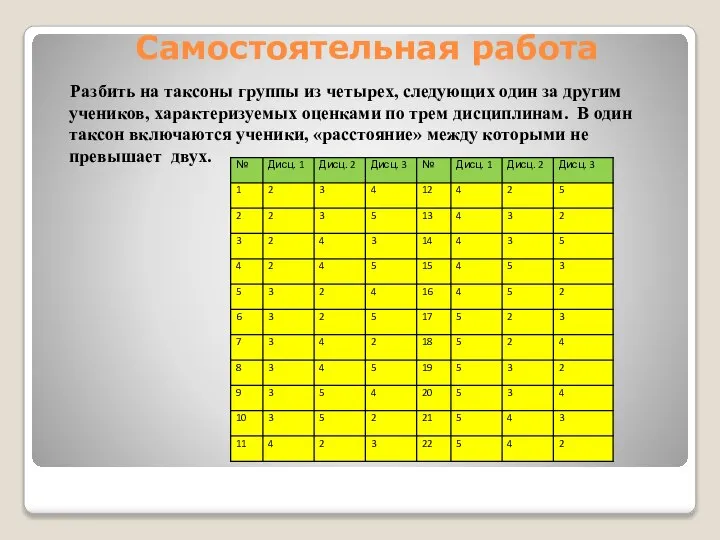
- 33. Самостоятельная работа Разбить на таксоны группы из четырех, следующих один за другим учеников, характеризуемых оценками по
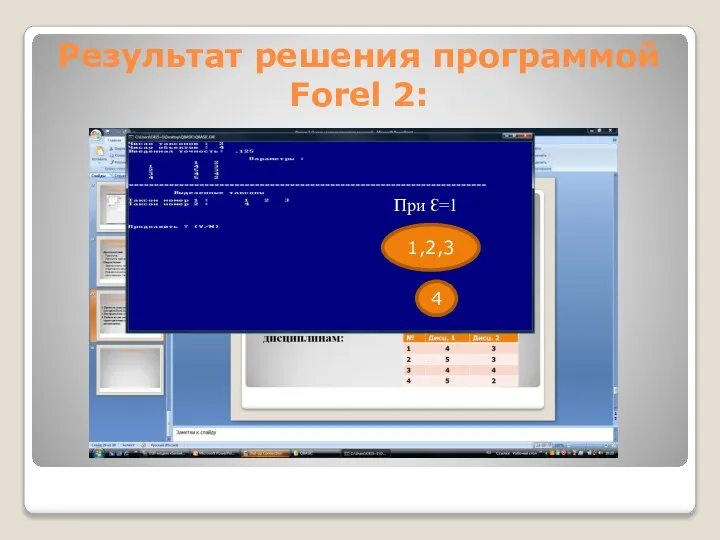
- 34. Результат решения программой Forel 2: 1,2,3 4 При Ɛ=1
- 36. Скачать презентацию
Часть 1
Обзор тем курса ТПР
Часть 1
Обзор тем курса ТПР

Необходимое условие принятия решений
Необходимое условие принятия решений – наличие альтернатив выбора
Необходимое условие принятия решений
Необходимое условие принятия решений – наличие альтернатив выбора

Классификация технологий принятия решений
Принятие решений
Без использования мат. моделей
С использованием мат. моделей
Классификация технологий принятия решений
Принятие решений
Без использования мат. моделей
С использованием мат. моделей

Простые решающие правила
Уставы (воинские уставы, устав СКГМИ и других университетов, монастырские
Простые решающие правила
Уставы (воинские уставы, устав СКГМИ и других университетов, монастырские
Таксономия
Типы задач таксономии:
Объединение статичных объектов в таксоны по «похожести».
Объединение статичных объектов
Таксономия
Типы задач таксономии:
Объединение статичных объектов в таксоны по «похожести».
Объединение статичных объектов
Метод бинарных отношений
Основная задача метода бинарных отношений – ранжирование объектов на
Метод бинарных отношений
Основная задача метода бинарных отношений – ранжирование объектов на
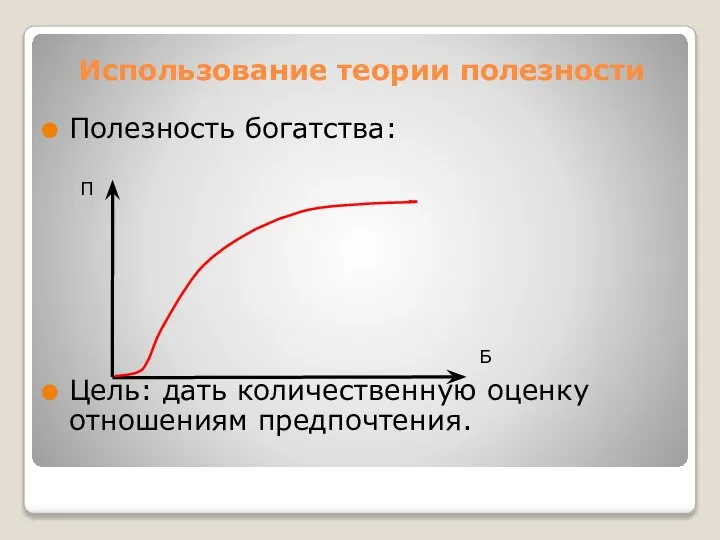
Использование теории полезности
Полезность богатства:
Цель: дать количественную оценку отношениям предпочтения.
Б
П
Использование теории полезности
Полезность богатства:
Цель: дать количественную оценку отношениям предпочтения.
Б
П
Принятие решений голосованием
Решаемые задачи:
Способы организации голосования.
Способы подведения итогов голосования
Технология прогнозирования итогов
Принятие решений голосованием
Решаемые задачи:
Способы организации голосования.
Способы подведения итогов голосования
Технология прогнозирования итогов
Метод эталонов
Решаемые задачи:
Ранжирование многокритериальных объектов.
Обработка экспертных оценок.
Подведение итогов голосования.
Прогнозирование персональной
Метод эталонов
Решаемые задачи:
Ранжирование многокритериальных объектов.
Обработка экспертных оценок.
Подведение итогов голосования.
Прогнозирование персональной
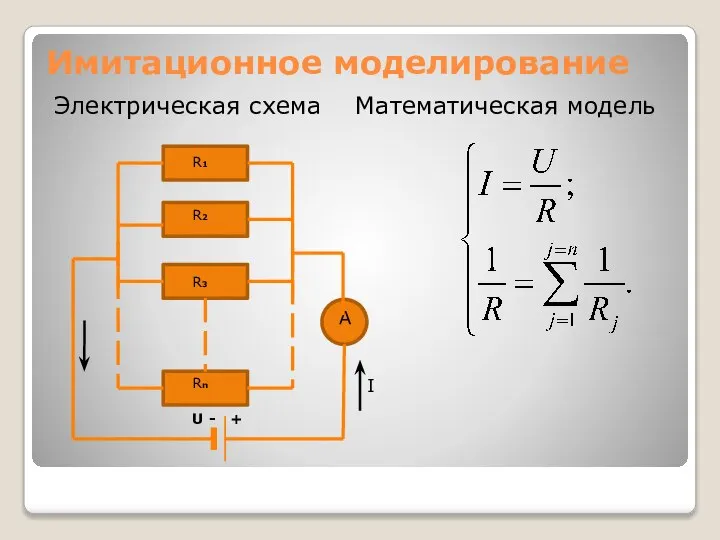
Имитационное моделирование
Электрическая схема Математическая модель
А
R1
R2
R3
Rn
U - +
I
Имитационное моделирование
Электрическая схема Математическая модель
А
R1
R2
R3
Rn
U - +
I

Игровое моделирование
Выбор метода обучения Матричная антагонистическая игра двух
преподавателем
Игровое моделирование
Выбор метода обучения Матричная антагонистическая игра двух
преподавателем
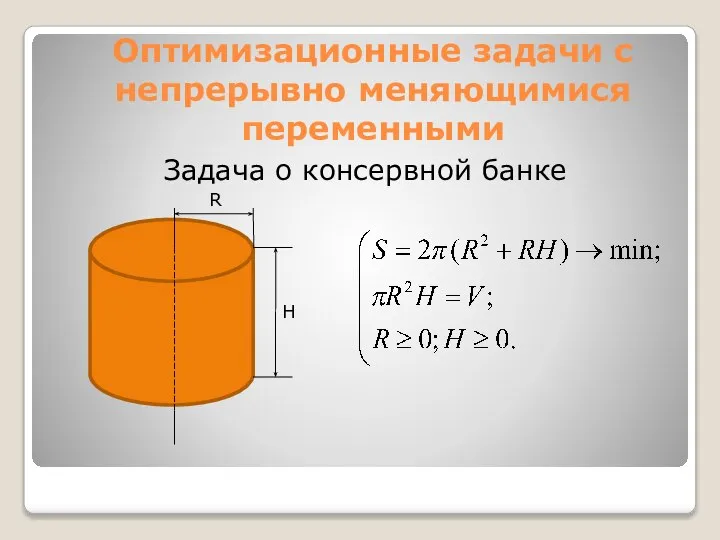
Оптимизационные задачи с непрерывно меняющимися переменными
Задача о консервной банке
R
H
Оптимизационные задачи с непрерывно меняющимися переменными
Задача о консервной банке
R
H
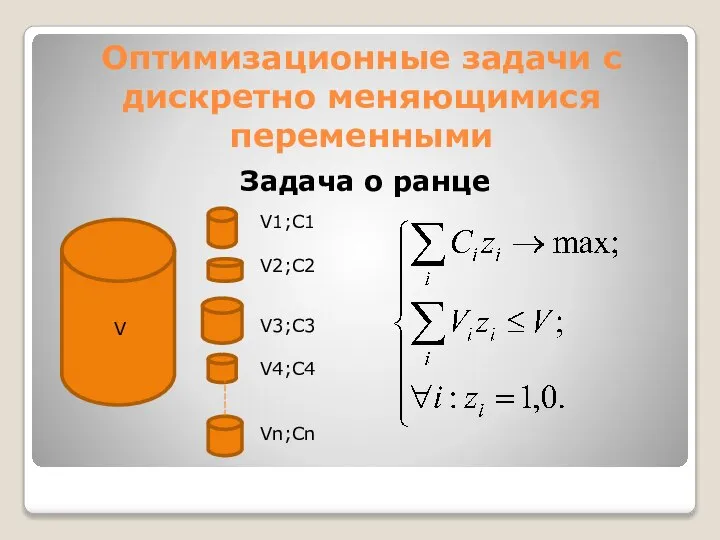
Оптимизационные задачи с дискретно меняющимися переменными
Задача о ранце
V
V1;C1
V2;C2
V3;C3
V4;C4
Vn;Cn
Оптимизационные задачи с дискретно меняющимися переменными
Задача о ранце
V
V1;C1
V2;C2
V3;C3
V4;C4
Vn;Cn
Повторить самостоятельно курсы:
Теория графов
Теория множеств
Математическая логика
Методы оптимизации
Мат. анализ
Повторить самостоятельно курсы:
Теория графов
Теория множеств
Математическая логика
Методы оптимизации
Мат. анализ
Часть 2
Простые алгоритмы таксономии
Часть 2
Простые алгоритмы таксономии
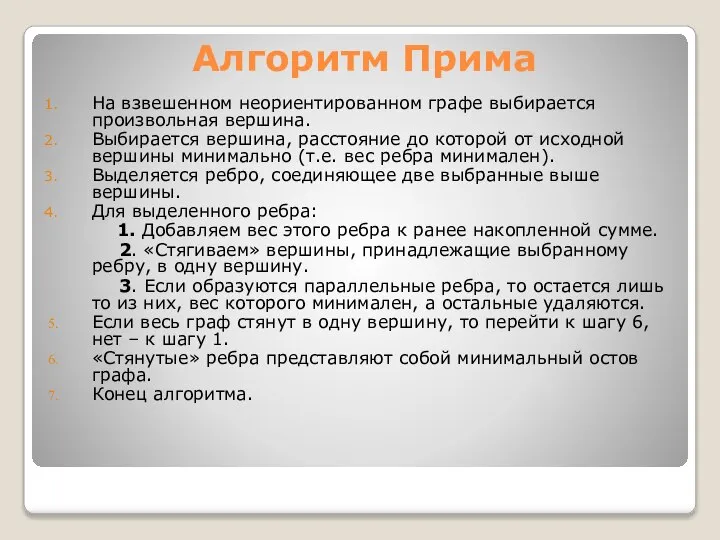
Алгоритм Прима
На взвешенном неориентированном графе выбирается произвольная вершина.
Выбирается вершина, расстояние до
Алгоритм Прима
На взвешенном неориентированном графе выбирается произвольная вершина.
Выбирается вершина, расстояние до
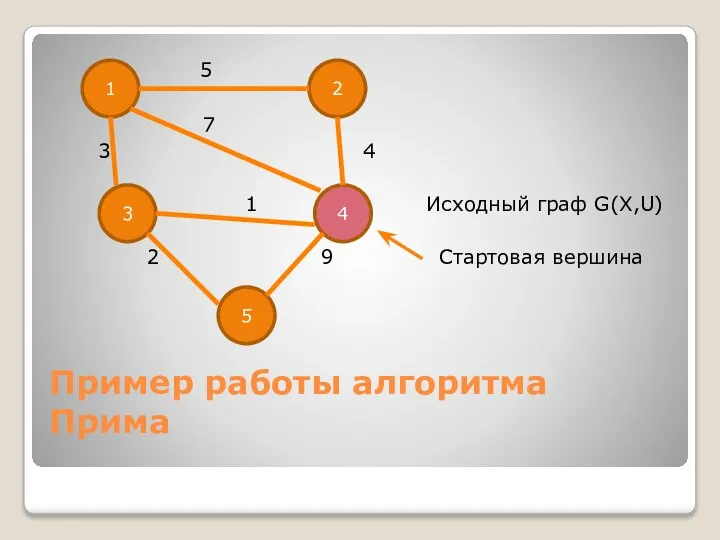
Пример работы алгоритма Прима
5
7
3 4
1 Исходный граф G(X,U)
Пример работы алгоритма Прима
5
7
3 4
1 Исходный граф G(X,U)
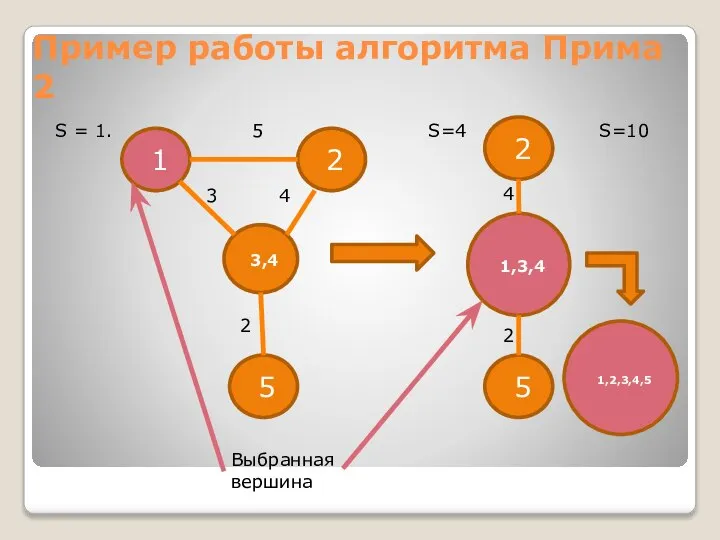
Пример работы алгоритма Прима 2
1
5
3,4
2
5
4
2
Выбранная вершина
2
5
1,3,4
4
2
S = 1. S=4 S=10
1,2,3,4,5
Пример работы алгоритма Прима 2
1
5
3,4
2
5
4
2
Выбранная вершина
2
5
1,3,4
4
2
S = 1. S=4 S=10
1,2,3,4,5

Минимальный остов графа G(X,U)
1
5
3
4
2
3 4 S=10
1
2
Минимальный остов графа G(X,U)
1
5
3
4
2
3 4 S=10
1
2
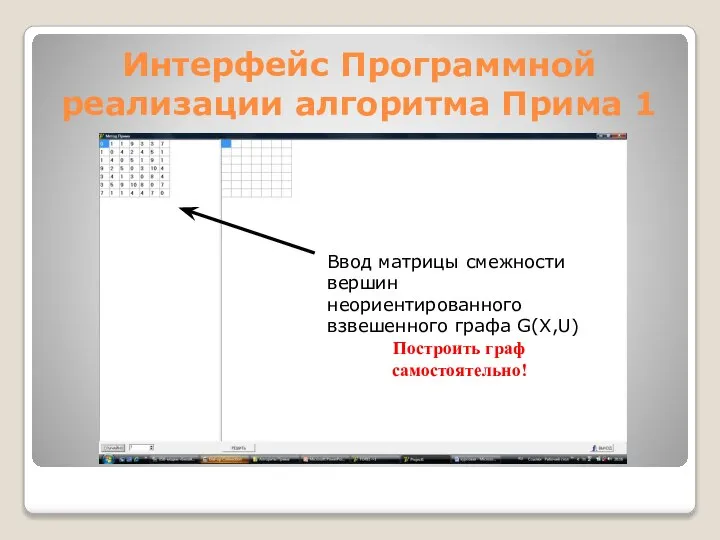
Интерфейс Программной реализации алгоритма Прима 1
Ввод матрицы смежности вершин неориентированного взвешенного
Интерфейс Программной реализации алгоритма Прима 1
Ввод матрицы смежности вершин неориентированного взвешенного
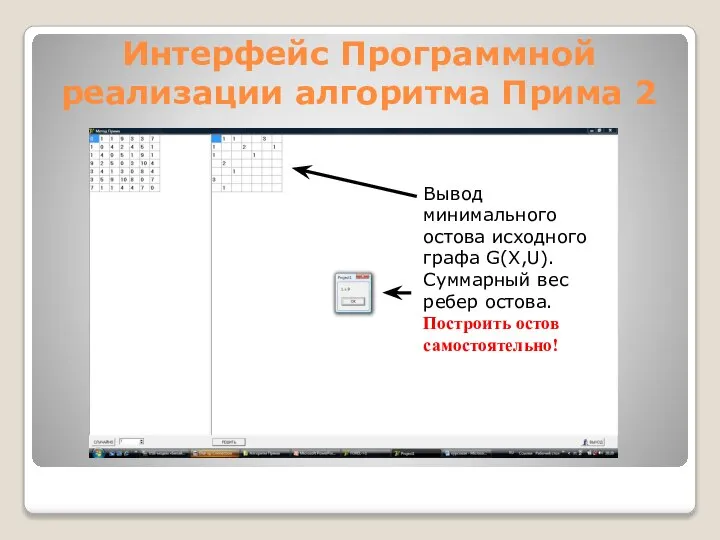
Интерфейс Программной реализации алгоритма Прима 2
Вывод минимального остова исходного графа G(X,U).
Суммарный
Интерфейс Программной реализации алгоритма Прима 2
Вывод минимального остова исходного графа G(X,U).
Суммарный
Алгоритмы таксономии
Пусть заданы: множество точек (вершин) А и множество ребер
Алгоритмы таксономии
Пусть заданы: множество точек (вершин) А и множество ребер

Определение λ - расстояний
Шаг 1.Выбирается любая, ранее не просматривавшаяся пара точек
Определение λ - расстояний
Шаг 1.Выбирается любая, ранее не просматривавшаяся пара точек
Самостоятельно
Определить λ – расстояние между 3-й и 5-й вершинами на
Самостоятельно
Определить λ – расстояние между 3-й и 5-й вершинами на
Гипотеза λ - компактности
Гипотеза λ - компактности формулируется следующим образом: реализация
Гипотеза λ - компактности
Гипотеза λ - компактности формулируется следующим образом: реализация
САМОСТОЯТЕЛЬНО
Объединить в таксоны в λ - пространстве трёх учеников - отличника,
САМОСТОЯТЕЛЬНО
Объединить в таксоны в λ - пространстве трёх учеников - отличника,
Назначение и свойства алгоритма Forel 1
1. Алгоритм Forel 1 предназначен для
Назначение и свойства алгоритма Forel 1
1. Алгоритм Forel 1 предназначен для

Forel-1 (шаги 1 – 5)
Шаг 1. Все признаки объектов нормируются
Forel-1 (шаги 1 – 5)
Шаг 1. Все признаки объектов нормируются
Forel-1 (шаги 6 – 13)
Шаг 6. R0= min{R0; R}.
Шаг 7. Точка
Forel-1 (шаги 6 – 13)
Шаг 6. R0= min{R0; R}.
Шаг 7. Точка

Forel-1 (шаги 14 – 16)
Шаг 14. Выбор j-й точки, для которой
Forel-1 (шаги 14 – 16)
Шаг 14. Выбор j-й точки, для которой

Достоинства и недостатки алгоритма Forel 1
Достоинства:
Простота.
Легкость программной реализации.
Недостатки:
Зависимость таксономии от выбора
Достоинства и недостатки алгоритма Forel 1
Достоинства:
Простота.
Легкость программной реализации.
Недостатки:
Зависимость таксономии от выбора
Самостоятельная работа
Разбить на таксоны группы из четырех, следующих один за
Самостоятельная работа
Разбить на таксоны группы из четырех, следующих один за
Результат решения программой Forel 2:
1,2,3
4
При Ɛ=1
Результат решения программой Forel 2:
1,2,3
4
При Ɛ=1
 Sisteme VLSI reconfigurabile. Operatorii definiţi în limbajul Verilog
Sisteme VLSI reconfigurabile. Operatorii definiţi în limbajul Verilog Лыжная подготовка в начальной школе
Лыжная подготовка в начальной школе Повышение эффективности урока и оценка качества образования Педсовет 25 января 2014 г. МКОУСОШ №38
Повышение эффективности урока и оценка качества образования Педсовет 25 января 2014 г. МКОУСОШ №38 Система автоматического управления
Система автоматического управления Планеты Солнечной системы. Представление о них по Корану и сунне
Планеты Солнечной системы. Представление о них по Корану и сунне Москва златоглавая. Работу выполнила Тверских С.
Москва златоглавая. Работу выполнила Тверских С. Великая Отечественная война.
Великая Отечественная война. Оказания первой медицинской помощи в условиях ЧС
Оказания первой медицинской помощи в условиях ЧС Новый год в странах мира
Новый год в странах мира Презентация "Этимологический словарь русского языка" - скачать презентации по МХК
Презентация "Этимологический словарь русского языка" - скачать презентации по МХК Особенности международной сегментации Белоглазова Ю.В., Бондарева Е.Д.
Особенности международной сегментации Белоглазова Ю.В., Бондарева Е.Д. Портфоліо Свищо Андрія Андрійовича учителя інформатики та фізики Олешницької загальноосвітньої школи І-ІІІ ступенів
Портфоліо Свищо Андрія Андрійовича учителя інформатики та фізики Олешницької загальноосвітньої школи І-ІІІ ступенів Оборонно-промышленный комплекс России ВЫПОЛНИЛА: СТУДЕНТКА РТА ГРУППЫ Т093 БУХАНОВА ТАТЬЯНА
Оборонно-промышленный комплекс России ВЫПОЛНИЛА: СТУДЕНТКА РТА ГРУППЫ Т093 БУХАНОВА ТАТЬЯНА Инженерная графика. Общие правила оформления чертежей
Инженерная графика. Общие правила оформления чертежей Презентация Федеральная адвокатская и Федеральная нотариальная палаты
Презентация Федеральная адвокатская и Федеральная нотариальная палаты Boża Matka
Boża Matka Международный туризм. Выполнила: Шешукова Т.А – учитель географии МБОУ «СОШ №33».
Международный туризм. Выполнила: Шешукова Т.А – учитель географии МБОУ «СОШ №33». Чистый оборотный капитал (ЧОК)
Чистый оборотный капитал (ЧОК) «Космическое путешествие»
«Космическое путешествие» Лыжная база «Саломаты»
Лыжная база «Саломаты» Античная керамика
Античная керамика ФАРМАКОЛОГИЯ ЦНС Психотропные средства Нейролептики (Антипсихотические средства) Анксиолитики (Транквилизаторы)
ФАРМАКОЛОГИЯ ЦНС Психотропные средства Нейролептики (Антипсихотические средства) Анксиолитики (Транквилизаторы) Художественная культура
Художественная культура Презентация на тему "Методы воспитания" - скачать презентации по Педагогике
Презентация на тему "Методы воспитания" - скачать презентации по Педагогике ОПЫТ ВНЕДРЕНИЯ КАНБАН Антон Марченко
ОПЫТ ВНЕДРЕНИЯ КАНБАН Антон Марченко Элементы и зонирование искусственного ландшафта
Элементы и зонирование искусственного ландшафта Основы взаимозаменяемости
Основы взаимозаменяемости Презентация Классификация чрезвычайных событий по скорости распространения опасности
Презентация Классификация чрезвычайных событий по скорости распространения опасности