- Система автоматического управления

Содержание
- 2. ФУНКЦИОНАЛЬНАЯ СХЕМА РАЗРАБАТЫВАЕМОЙ САУ МП – микропроцессор; У – усилитель; ЭМКЛ – электромагнитный клапан; ГЦ –
- 3. Значение максимально-допустимой температуры обмотки: Диаметр провода обмотки из условия нагрева его максимальным током: Средняя длина витка
- 4. Время регулирования: tp=0,056 с. Перерегулирование: Декремент затухания Время достижения первого максимума: tmax=0,0046 c. Время нарастания: tн=0,0025с.
- 5. Для построения ФЧХ используем зависимость: получим Произведем замены: Для построения ЛАЧХ воспользуемся передаточной функцией разомкнутой системы
- 6. ПОСТРОЕНИЕ ЖЕЛАЕМОЙ ЛАЧХ И ФЧХ СИСТЕМЫ И ЛАЧХ КУ Корректирующее устройство системы примет следующий вид: Параметры
- 8. Скачать презентацию
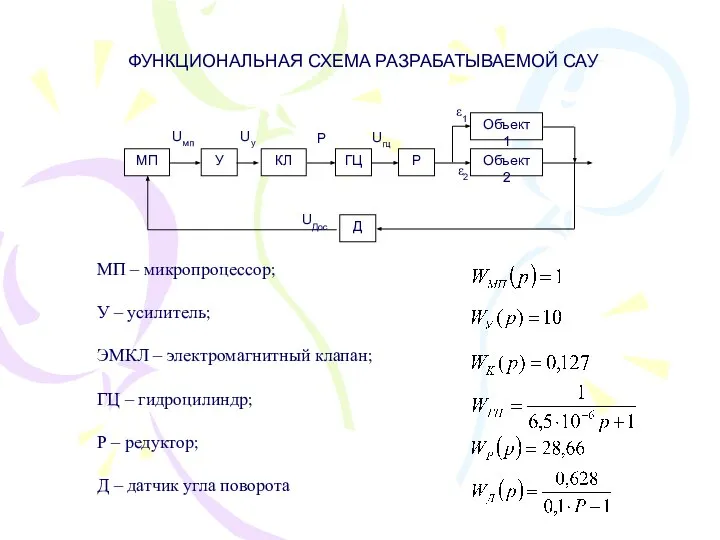
ФУНКЦИОНАЛЬНАЯ СХЕМА РАЗРАБАТЫВАЕМОЙ САУ
МП – микропроцессор;
У – усилитель;
ЭМКЛ – электромагнитный
МП – микропроцессор;
У – усилитель;
ЭМКЛ – электромагнитный
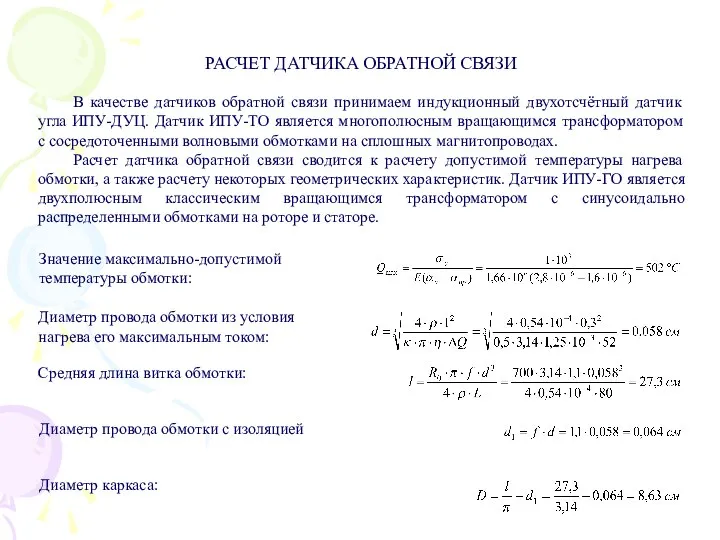
Значение максимально-допустимой
температуры обмотки:
Диаметр провода обмотки из условия
нагрева его максимальным током:
Средняя длина
Значение максимально-допустимой
температуры обмотки:
Диаметр провода обмотки из условия
нагрева его максимальным током:
Средняя длина
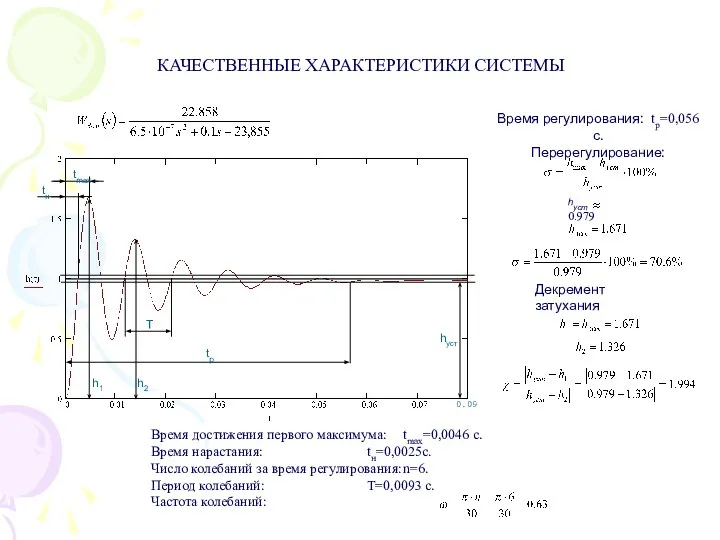
Время регулирования: tp=0,056 с.
Перерегулирование:
Декремент затухания
Время достижения первого максимума: tmax=0,0046 c.
Время нарастания: tн=0,0025с.
Число
Время регулирования: tp=0,056 с.
Перерегулирование:
Декремент затухания
Время достижения первого максимума: tmax=0,0046 c.
Время нарастания: tн=0,0025с.
Число
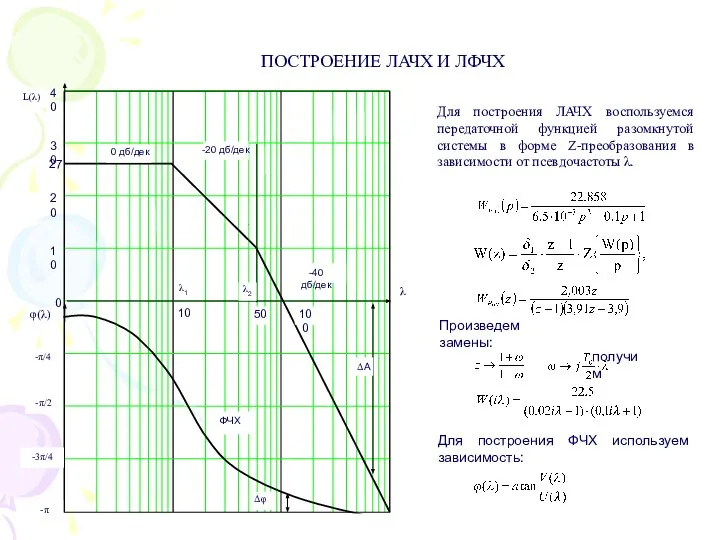
Для построения ФЧХ используем зависимость:
получим
Произведем замены:
Для построения ЛАЧХ воспользуемся передаточной
Для построения ФЧХ используем зависимость:
получим
Произведем замены:
Для построения ЛАЧХ воспользуемся передаточной
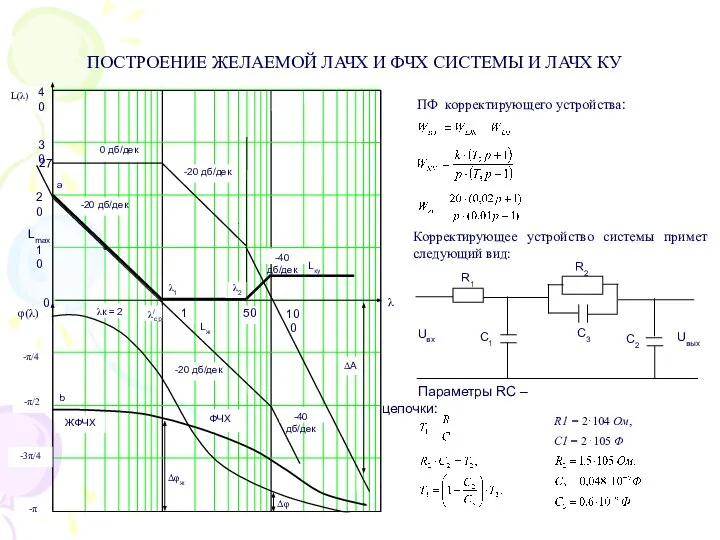
ПОСТРОЕНИЕ ЖЕЛАЕМОЙ ЛАЧХ И ФЧХ СИСТЕМЫ И ЛАЧХ КУ
Корректирующее устройство
ПОСТРОЕНИЕ ЖЕЛАЕМОЙ ЛАЧХ И ФЧХ СИСТЕМЫ И ЛАЧХ КУ
Корректирующее устройство
 Структура программы на Си. Состав языка. (лекция 1)
Структура программы на Си. Состав языка. (лекция 1) Части речи. Когнитивный подход
Части речи. Когнитивный подход Правовые основы обеспечения безопасности и здоровья в ЧС Подготовил : Миньясов Сергей Группа Ю - 102
Правовые основы обеспечения безопасности и здоровья в ЧС Подготовил : Миньясов Сергей Группа Ю - 102 Кандзи-ниндзя. Задание 6
Кандзи-ниндзя. Задание 6 Өндірістік логистикадағы материалдық ағымдарды басқарудың тартушы| жəне итеруші жүйелері. Тартушы жəне итеруші жүйелердің мəні
Өндірістік логистикадағы материалдық ағымдарды басқарудың тартушы| жəне итеруші жүйелері. Тартушы жəне итеруші жүйелердің мəні умножение и деление на2 - презентация для начальной школы
умножение и деление на2 - презентация для начальной школы Национальная специфика фразеологии
Национальная специфика фразеологии Упpавление ключами
Упpавление ключами Шпоночные и шлицевые соединения
Шпоночные и шлицевые соединения Техники рисования акварелью
Техники рисования акварелью Искусство силуэта
Искусство силуэта  ТЕМА 3 СТАТИСТИЧЕСКАЯ СВОДКА. ГРУППИРОВКА.
ТЕМА 3 СТАТИСТИЧЕСКАЯ СВОДКА. ГРУППИРОВКА.  Нейропатия малоберцового нерва
Нейропатия малоберцового нерва Весёлая геометрия Для самых маленьких
Весёлая геометрия Для самых маленьких Виктор Петрович Астафьев (1924-2001)
Виктор Петрович Астафьев (1924-2001) Культура Древней Месопотамии
Культура Древней Месопотамии ИБС
ИБС Кто хочет стать миллионером
Кто хочет стать миллионером Дезинфекция, ПСО и стерилизация медицинских инструментов.
Дезинфекция, ПСО и стерилизация медицинских инструментов. Обмен веществ и энергии
Обмен веществ и энергии Подвижность в суставах (гибкость) и методики ее развития
Подвижность в суставах (гибкость) и методики ее развития 15 марта - Всемирный день защиты прав потребителей
15 марта - Всемирный день защиты прав потребителей Pieśń Jasnogórska
Pieśń Jasnogórska Отдельные виды юридических лиц в российском гражданском праве
Отдельные виды юридических лиц в российском гражданском праве Сложносочинённое предложение - презентация для начальной школы_
Сложносочинённое предложение - презентация для начальной школы_ Создание системы датчиков окружающей среды и управление процессами на основе полученных данных
Создание системы датчиков окружающей среды и управление процессами на основе полученных данных Стандартный замер
Стандартный замер Методика расследования угонов
Методика расследования угонов