- Алгоритм Чена (1996) - презентация по Геометрии_

Содержание
- 3. 1 Розділимо множину P на n/m непересічних підмножин Pi 2 Побудуємо опуклі оболонки CH (Pi) 3
- 5. for t =1; 2; 3;… do M:=min (n, 2^(2^t)) Викликати модифікацію Chan (P; m) if Алгоритм
- 6. Побудова ОБ в реальному часі
- 8. ВИДАЛЕННЯ НЕВИДИМИХ ГРАНЕЙ, РЕБЕР ТА ВЕРШИН
- 12. Алгоритми об'єктних методів працюють з об'єктними координатами примітивів і точок. Алгоритми екранних методів працюють з координатами
- 13. Алгоритм Робертса Відкидаються ребра, що належать не лицьовим граням Кожне з ребер перевіряється на закривання лицьовими
- 14. Z-буфер
- 15. Для кожного пікселя [x, y] буфера кадру Begin If Z [x, y] Колір [x, y]: =
- 17. Скачать презентацию

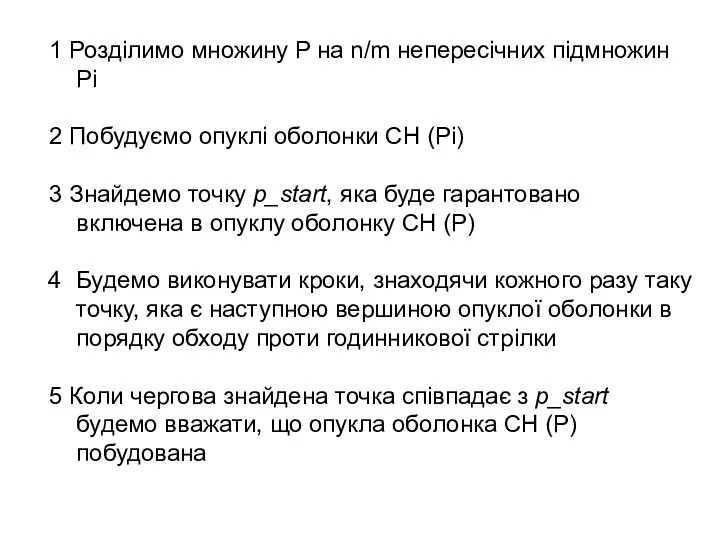
1 Розділимо множину P на n/m непересічних підмножин Pi
2 Побудуємо опуклі
1 Розділимо множину P на n/m непересічних підмножин Pi
2 Побудуємо опуклі


for t =1; 2; 3;… do
M:=min (n, 2^(2^t))
Викликати модифікацію Chan (P;
for t =1; 2; 3;… do
M:=min (n, 2^(2^t))
Викликати модифікацію Chan (P;
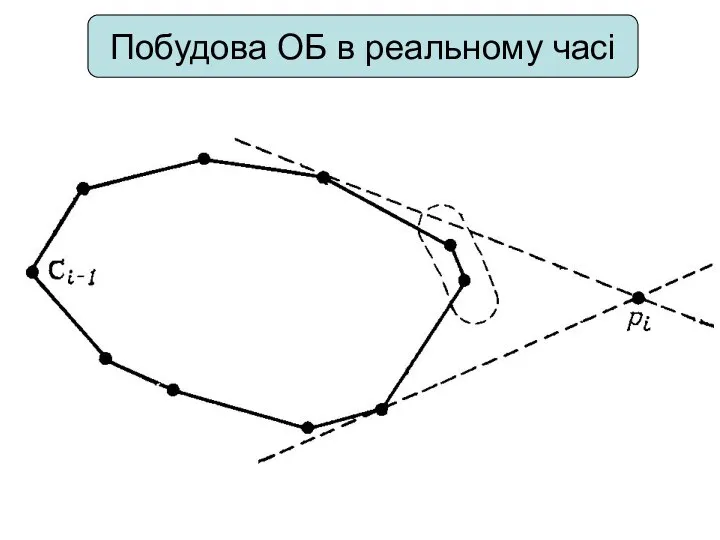
Побудова ОБ в реальному часі
Побудова ОБ в реальному часі


ВИДАЛЕННЯ НЕВИДИМИХ ГРАНЕЙ, РЕБЕР ТА ВЕРШИН
ВИДАЛЕННЯ НЕВИДИМИХ ГРАНЕЙ, РЕБЕР ТА ВЕРШИН




Алгоритми об'єктних методів працюють з об'єктними координатами примітивів і точок.
Алгоритми екранних
Алгоритми об'єктних методів працюють з об'єктними координатами примітивів і точок.
Алгоритми екранних

Алгоритм Робертса
Відкидаються ребра, що належать не лицьовим граням
Кожне з ребер перевіряється
Алгоритм Робертса
Відкидаються ребра, що належать не лицьовим граням
Кожне з ребер перевіряється
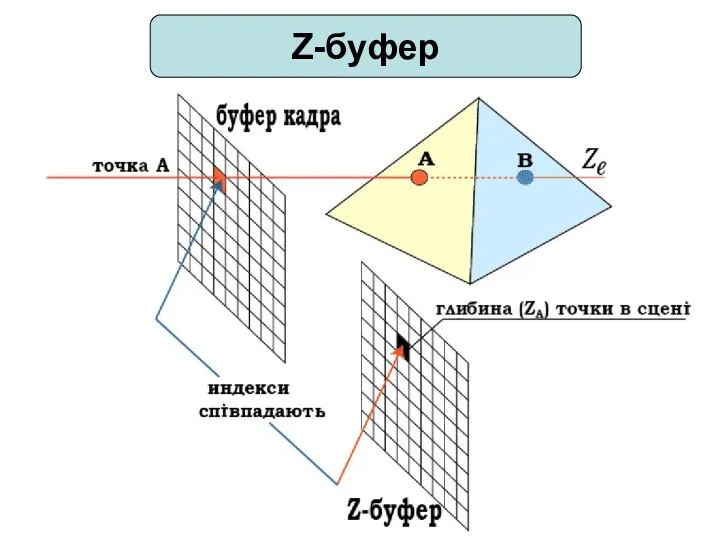
Z-буфер
Z-буфер
![Для кожного пікселя [x, y] буфера кадру Begin If Z [x,](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1146543/slide-14.jpg)
Для кожного пікселя [x, y] буфера кадру
Begin
If Z [x, y]
Для кожного пікселя [x, y] буфера кадру
Begin
If Z [x, y]
 ГЕОМЕТРИЯ 9 КЛАСС
ГЕОМЕТРИЯ 9 КЛАСС ПРАВИЛЬНЫЙ МНОГОГРАННИК- - презентация по Геометрии
ПРАВИЛЬНЫЙ МНОГОГРАННИК- - презентация по Геометрии Геометрический смысл производной - презентация по Геометрии
Геометрический смысл производной - презентация по Геометрии Геометрические задачи на построение - презентация по Геометрии
Геометрические задачи на построение - презентация по Геометрии Площадь параллелограмма 9 класс - презентация по Геометрии_
Площадь параллелограмма 9 класс - презентация по Геометрии_ Треугольники
Треугольники Взаимное расположение графиков линейных функций
Взаимное расположение графиков линейных функций Волшебные шары - кусудамы - презентация по Геометрии
Волшебные шары - кусудамы - презентация по Геометрии Геометрия у меня в доме - презентация по Геометрии
Геометрия у меня в доме - презентация по Геометрии Объем параллелепипеда
Объем параллелепипеда Логинова Ирина Викторовна, «Школа развития способностей «Крошка Енот», преподаватель «Логики» и «Наглядной геометрии» Вели
Логинова Ирина Викторовна, «Школа развития способностей «Крошка Енот», преподаватель «Логики» и «Наглядной геометрии» Вели Презентация по геометрии ГЕОМЕТРИЯ Векторы в пространстве
Презентация по геометрии ГЕОМЕТРИЯ Векторы в пространстве  Элективный курс «Черчение и графика» Зеленина Елена Алексеевна учитель изобразительного искусства и черчения МОУ «Ивнянская с
Элективный курс «Черчение и графика» Зеленина Елена Алексеевна учитель изобразительного искусства и черчения МОУ «Ивнянская с Методика работы с задачей
Методика работы с задачей Осевая и центральная симметрия - презентация по Геометрии_
Осевая и центральная симметрия - презентация по Геометрии_ Многогранники - презентация по Геометрии
Многогранники - презентация по Геометрии Конечны ли чевианы? Найти ответ не так уж легко.
Конечны ли чевианы? Найти ответ не так уж легко. Площади фигур. Теорема Пифагора
Площади фигур. Теорема Пифагора Выполнил: Зиновьев Никита Ученик 9а класса МОУ СОШ №40
Выполнил: Зиновьев Никита Ученик 9а класса МОУ СОШ №40 «Сумма углов треугольника» Разработчик: учитель математики МОУ СОШ № 2 города Радужный Мишурова Любовь Александра
«Сумма углов треугольника» Разработчик: учитель математики МОУ СОШ № 2 города Радужный Мишурова Любовь Александра  Свойства равнобедренного треугольника - презентация по Геометрии
Свойства равнобедренного треугольника - презентация по Геометрии УДИВИТЕЛЬНЫЙ КВАДРАТ Геометрия 5-6 класс
УДИВИТЕЛЬНЫЙ КВАДРАТ Геометрия 5-6 класс Moy”Коммунарский лицей” Тема: Геометрические фигуры в живописи. Выполнили: Гущина Анна и Осипова Анастасия.
Moy”Коммунарский лицей” Тема: Геометрические фигуры в живописи. Выполнили: Гущина Анна и Осипова Анастасия.  Развитие элементов логического мышления. Тема: «Построение графической модели». МОУ «Начальная школа-детский сад» г. Лысьва П
Развитие элементов логического мышления. Тема: «Построение графической модели». МОУ «Начальная школа-детский сад» г. Лысьва П Вписанный угол
Вписанный угол Логарифм. Основные понятия - презентация по Геометрии
Логарифм. Основные понятия - презентация по Геометрии Тема учебного проекта: Решение тригонометрических уравнений Творческое название: Различные способы решения одного уравнения А
Тема учебного проекта: Решение тригонометрических уравнений Творческое название: Различные способы решения одного уравнения А Геометрические построения - презентация по Геометрии
Геометрические построения - презентация по Геометрии