- Расчет рабочих органов для внесения удобрений

Содержание
- 2. РАСЧЁТ ОБЪЕМА УДОБРЕНИЙ В ДЕНЬ скорость движения, а рабочая ширина разбрасывания указана в технической характеристике конкретной
- 3. РАСЧЁТ ЧАС. ПРОИЗВОДИТЕЛЬНОСТИ где А – агротехнические сроки внесения ТОУ, А =5 …..8 дней. Затем определяют
- 4. РАСЧЁТ МАССЫ ТОУ В КУЗОВЕ где V к- объём кузова, м3; (4.4) – объёмная масса ТОУ,т/м3
- 5. РАСЧЕТ ВРЕМЕНИ ЦИКЛА Время цикла определяется из выражения где -время загрузки кузова разбрасывателя навозом , ч;
- 6. Время загрузки кузова где -производительность загрузчика, т/ч. При использовании перегрузочной технологии определяют производительность транспортного средства по
- 7. Транспортёр навозоразбрасывателя 1 – брус рамы; 2 и 3 – ведущий и ведомый валы; 4- звёздочка
- 8. СХЕМА КУЗОВНОГО РАЗБРАСЫВАТЕЛЯ ТОУ 1 и 2- нижний и верхний барабаны; 3- транспортёр; 4- кузов. Рисунок.
- 9. РАСЧЁТ СЕКУНДНОЙ ПОДАЧИ ТОУ Секундная подача удобрений q транспортёром зависит от его скорости u тр. ,
- 10. РАСЧЁТ СКОРОСТИ ТРАНСПОРТЁРА Так как величины В к., Н и В р. для конкретного навозоразбрасывателя постоянны,
- 11. РЕЖИМ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ТРАНСПОРТЁРА Таким образом, при изменении значения плотности органических удобрений должна изменена настройка скорости
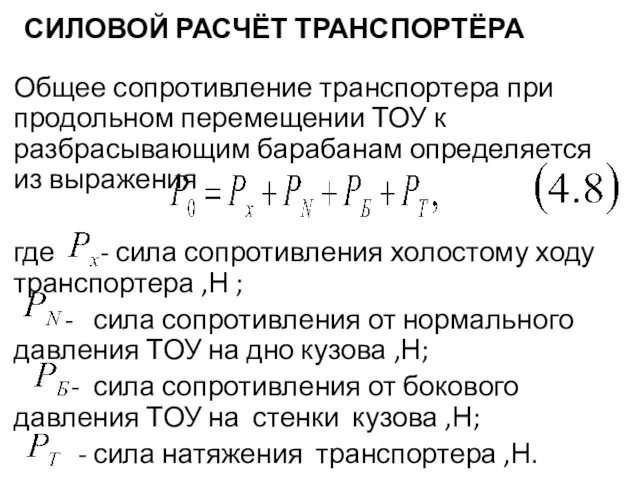
- 12. СИЛОВОЙ РАСЧЁТ ТРАНСПОРТЁРА Общее сопротивление транспортера при продольном перемещении ТОУ к разбрасывающим барабанам определяется из выражения
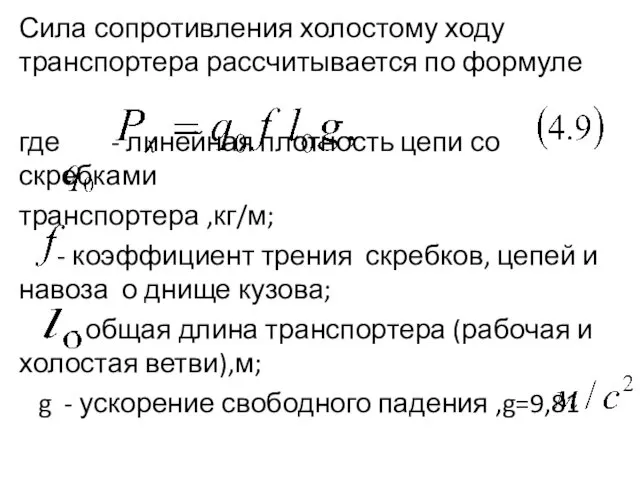
- 13. Сила сопротивления холостому ходу транспортера рассчитывается по формуле где - линейная плотность цепи со скребками транспортера
- 14. Сила сопротивления транспортера от давления навоза на дно кузова определяется из выражения где - плотность навоза,
- 15. где - коэффициент бокового давления навоза на боковые стенки кузова; - объём навоза, создающего давление на
- 16. где - коэффициент, учитывающий перегрузку двигателя в момент пуска транспортера, =1,2…1,25 ; - скорость транспортера, м/с;
- 17. РАСЧЁТ РАЗБРАСЫВАЮЩЕГО УСТРОЙСТВА Разбрасывающее устройство применяют двух видов: с осью вращения, параллельной направления движения и перпендикулярной
- 18. РАСЧЁТ РАЗБРАСЫВАЮЩЕГО БАРАБАНА Для разбрасывания органических удобрений используют роторные устройства с горизонтальной осью вращения. Технологический процесс
- 19. Во втором случае в качестве основного рабочего органа используют барабан (битер), представляющий собой полую трубу, на
- 20. Рисунок 4.-Схема взаимодействия витков барабана с ТОУ
- 21. СЕЧЕНИЕ БАРАБАНА Рисунок 5.-Действие сил в вертикальной плоскости
- 22. Типы разбрасывающих барабанов а – шнеколопастный; б- ленточный; в – лопастный.Рис.6.- Схемы барабанов
- 23. СИЛЫ , ДЕЙСТВУЮЩИЕ НА БАРАБАН Первая фаза начинается с момента выхода лопасти из массы удобрений, т.е.
- 24. Процесс разбрасывания органических удобрений роторным аппаратом а- действующие силы; б- схемы движения. Рисунок 7.-Схемы к расчёту
- 25. УСЛОВИЕ ДВИЖЕНИЯ ЧАСТИЦЫ В ПЕРВОМ КВАДРАНТЕ Условие движения первой частицы в первом квадранте при определяется выражением
- 26. РАСЧЁТ СКОРОСТЕЙ ДВИЖЕНИЯ ЧАСТИЦ Из этого уравнения определяют относительную скорость частицы вдоль лопасти и её конечное
- 27. УГОЛ СХОДА ЧАСТИЦ С ЛОПАСТИ Угол схода частиц с лопасти . (6) Как видим , значительно
- 28. УСЛОВИЕ СХОДА ЧАСТИЦ С ЛОПАСТИ при котором удобрения начинают сходить с лопасти. Из-за различного расположения частиц
- 29. КООРДИНАТЫ ТОЧКИ ПАДЕНИЯ ТОУ Уравнение движения частиц без учёта сопротивления воздуха в параметрической форме с началом
- 30. РАСЧЁТ ВРЕМЕНИ ПОЛЁТА ЧАСТИЦ ТОУ Откуда (10) Так как ,время не может быть отрицательным, то в
- 31. РАСЧЁТ ДАЛЬНОСТИ ПОЛЕТА ЧАСТИЦЫ Подставим значение t из выражения (10) в первое параметрическое уравнение, определим дальность
- 32. УСЛОВИЯ РАБОТЫ РАЗБРАСЫВАЮЩЕГО УСТРОЙСТВА Навозоразбрасыватели работают надёжно (без забивания), если производительность разбрасывающего устройства превышает секундную подачу
- 33. РАСЧЁТ ЧАСТОТЫ ВРАЩЕНИЯ РАЗБРАСЫВАЮЩЕГО БАРАБАНА Из выражения (13) уточняем частоту вращения разбрасывающего барабана (14) У существующих
- 34. РАСЧЕТ ОПТИМАЛЬНОЙ ЧАСТОТЫ ВРАЩЕНИЯ БАРАБАНА Оптимальную частоту вращения разбрасывающего барабана ( битера) с позиции качественного разбрасывания
- 35. РАСЧЕТ ДО ИЗМЕЛЬЧАЮЩЕГО БАРАБАНА Отличительной особенностью расчета нижнего барабана состоит в определении силы резания. Нормальная сила
- 36. Момент резания Вращающий момент Мощность необходимая на привод до измельчающего барабана
- 37. РАСЧЕТ РАБОЧИХ ОРГАНОВ ВНЕСЕНИЯ МИНЕРАЛЬНЫХ УДОБРЕНИЙ Разбрасывающие диски с вертикальными осями вращения снабжены плоскими или желобообразными
- 38. УСЛОВИЕ ДВИЖЕНИЯ УДОБРЕНИЙ ДО ВСТРЕЧИ С ЛОПАСТЬЮ Условие движения удобрений до встречи с лопастью выражается неравенством
- 39. ДВИЖЕНИЕ ГРАНУЛЫ ПО НЕКОТОРОЙ КРИВОЙ Согласно экспериментальным данным упавшая на вращающийся диск гранула движется по некоторой
- 40. Рисунок1.- Движение частицы удобрения на диске центробежного разбрасывающего аппарата.
- 41. Рис. 321. Движение частицы удобрения по лопатке дискового центробежного разбрасывающего аппарата.
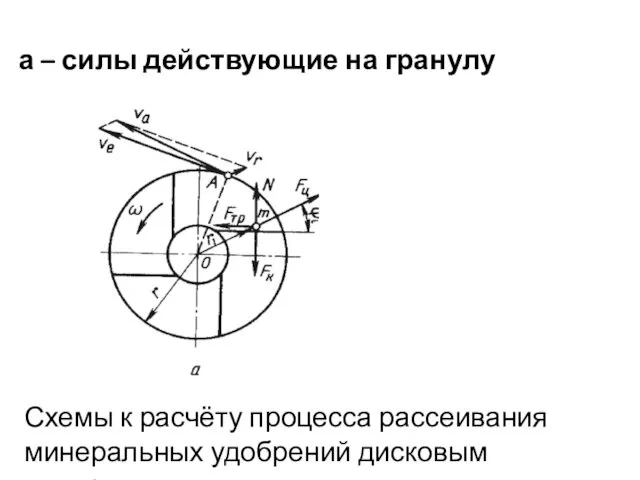
- 42. а – силы действующие на гранулу Схемы к расчёту процесса рассеивания минеральных удобрений дисковым аппаратом
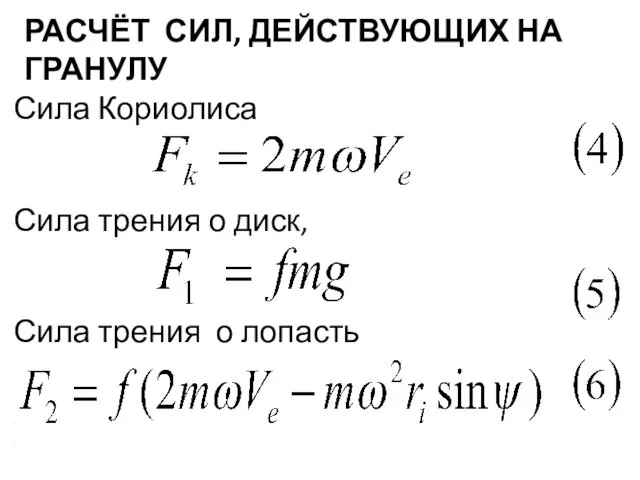
- 43. РАСЧЁТ СИЛ, ДЕЙСТВУЮЩИХ НА ГРАНУЛУ Сила Кориолиса Сила трения о диск, Сила трения о лопасть ω
- 44. ОБОЗНАЧЕНИЕ ВЕЛИЧИН ВЫРАЖЕНИЯ (6) - относительная скорость скольжения гранулы вдоль лопасти; f – коэффициент трения гранулы
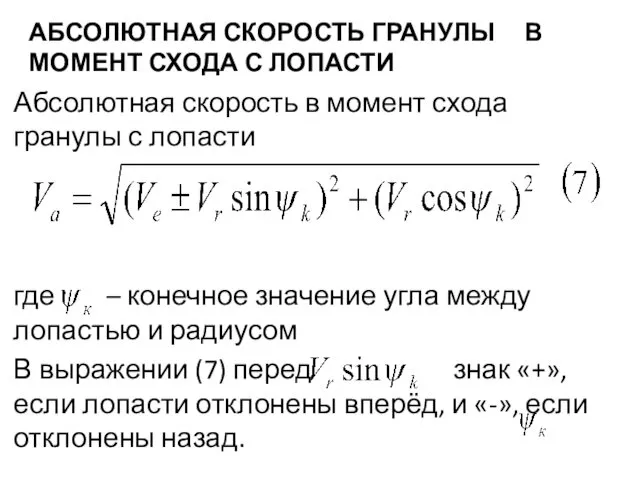
- 45. АБСОЛЮТНАЯ СКОРОСТЬ ГРАНУЛЫ В МОМЕНТ СХОДА С ЛОПАСТИ Абсолютная скорость в момент схода гранулы с лопасти
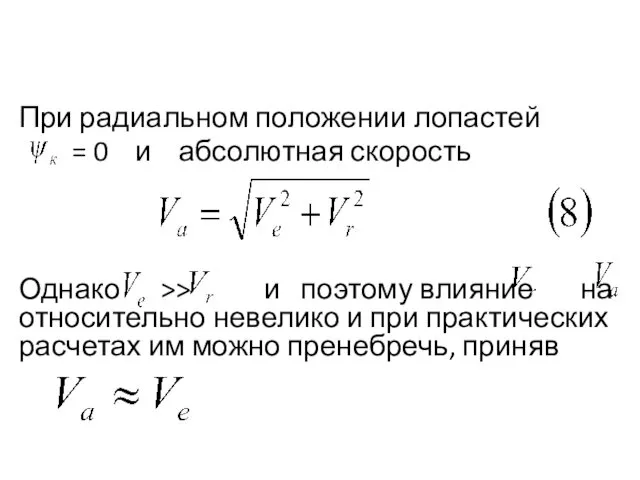
- 46. При радиальном положении лопастей = 0 и абсолютная скорость Однако >> и поэтому влияние на относительно
- 47. СИЛЫ , ДЕЙСТВУЮЩИЕ НА ГРАНУЛУ В МОМЕНТ СХОДА С ЛОПАСТИ Вторая фаза представляет собой движение тела,
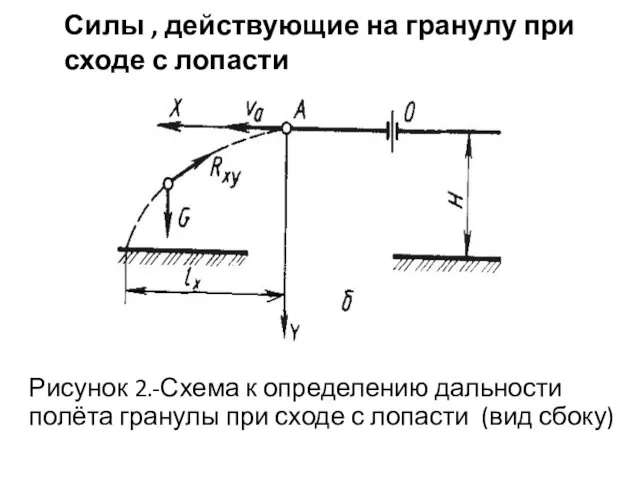
- 48. Силы , действующие на гранулу при сходе с лопасти Рисунок 2.-Схема к определению дальности полёта гранулы
- 49. РАСЧЕТ ДАЛЬНОСТИ ПОЛЕТА ГРАНУЛ Дальность полета, следовательно и ширину захвата можно определить из уравнения траектории полета
- 50. СПОСОБЫ УВЕЛИЧЕНИЯ ДАЛЬНОСТИ ПОЛЕТА ГРАНУЛ Для увеличения дальности полета гранул в некоторых конструкциях применяют конические диски
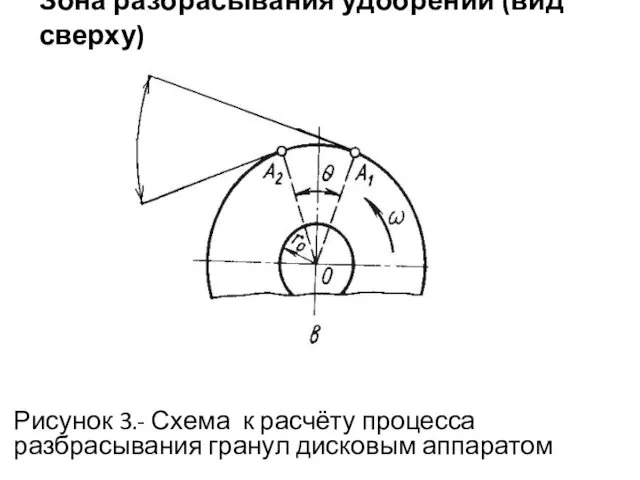
- 51. Зона разбрасывания удобрений (вид сверху) Рисунок 3.- Схема к расчёту процесса разбрасывания гранул дисковым аппаратом
- 52. РАСЧЁТ ШИРИНЫ РАССЕИВАНИЯ ГРАНУЛ 2-Х ДИСК. Для двухдискового аппарата ширина рассеивания рассчитывается из выражения где А
- 53. ОСНОВНЫЕ ТЕНДЕНЦИИ РАЗВИТИЯ КОНСТРУКЦИЙ МАШИН ДЛЯ ВНЕСЕНИЯ УДОБРЕНИЙ В настоящее время около 80 % твердых минеральных
- 54. Особенностью современного периода развития этой группы машин является разработка конструкций, позволяющих вносить удобрения в соответствии с
- 55. в реальном масштабе времени на основе показаний оптических датчиков или специальных лазерных систем. Для точного дозирования
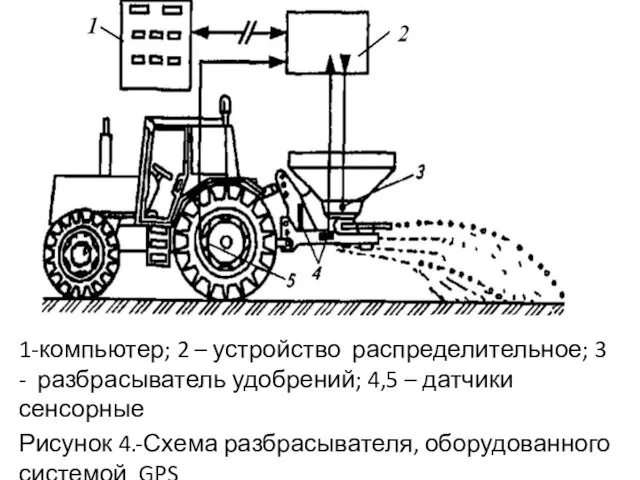
- 56. 1-компьютер; 2 – устройство распределительное; 3 - разбрасыватель удобрений; 4,5 – датчики сенсорные Рисунок 4.-Схема разбрасывателя,
- 57. Наиболее простые из них регистрируют только содержание бункера разбрасывателя при остановке агрегата. Наряду с этим имеются
- 58. Компьютер также подает предупредительный сигнал, если заданная норма внесения недосягаема (например, при слишком высокой скорости движения
- 59. — координатного земледелия с использованием спутниковых навигационных систем. Они отличаются только числом и размещением взвешивающих элементов,
- 60. У разбрасывателей с гидроприводом разбрасывающих дисков существует прямая связь между приводным моментом дисков и потоком удобрений,
- 61. Для определения локальной потребности в азоте успешно применяют оптические сенсоры. Они определяют в отраженных солнечных лучах
- 62. содержание азота в растениях бесконтактным способом и позволяют управлять нормой внесения удобрений в реальном масштабе времени.
- 63. Автоматические взвешивающие системы используются и в конструкции широкозахватных разбрасывателей минеральных удобрений, работающих по принципу принудительного дозирования.
- 64. Автоматические взвешивающие системы используются и в конструкции широкозахватных разбрасывателей минеральных удобрений, работающих по принципу принудительного дозирования.
- 65. Автоматические взвешивающие системы используются и в конструкции широкозахватных разбрасывателей минеральных удобрений, работающих по принципу принудительного дозирования.
- 66. наличием прочного бункера с боковым усилением, ленточного транспортера с автоматическим управлением, двух магистральной пневматической тормозной системы
- 67. как счетчик обработанной площади. Конструктивными особенностями являются наличие двойного воронкообразного бункера с откидными решетками для отделения
- 69. Скачать презентацию
РАСЧЁТ ОБЪЕМА УДОБРЕНИЙ В ДЕНЬ
скорость движения, а рабочая ширина разбрасывания
РАСЧЁТ ОБЪЕМА УДОБРЕНИЙ В ДЕНЬ
скорость движения, а рабочая ширина разбрасывания
РАСЧЁТ ЧАС. ПРОИЗВОДИТЕЛЬНОСТИ
где А – агротехнические сроки внесения ТОУ, А
РАСЧЁТ ЧАС. ПРОИЗВОДИТЕЛЬНОСТИ
где А – агротехнические сроки внесения ТОУ, А
РАСЧЁТ МАССЫ ТОУ В КУЗОВЕ
где V к- объём кузова, м3; (4.4)
РАСЧЁТ МАССЫ ТОУ В КУЗОВЕ
где V к- объём кузова, м3; (4.4)
РАСЧЕТ ВРЕМЕНИ ЦИКЛА
Время цикла определяется из выражения
где -время загрузки кузова разбрасывателя
РАСЧЕТ ВРЕМЕНИ ЦИКЛА
Время цикла определяется из выражения
где -время загрузки кузова разбрасывателя
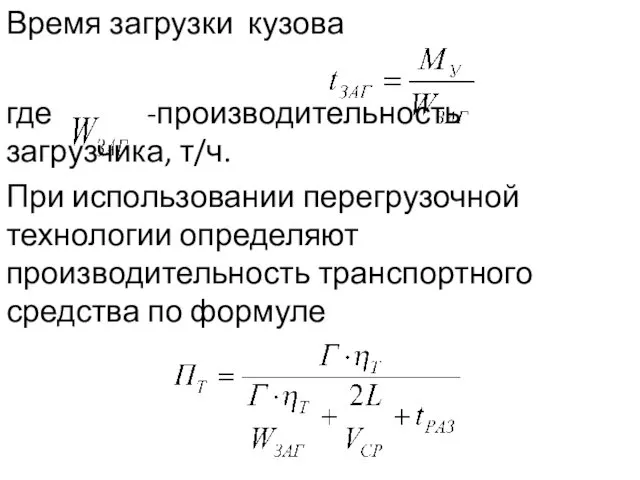
Время загрузки кузова
где -производительность загрузчика, т/ч.
При использовании перегрузочной технологии определяют производительность
Время загрузки кузова
где -производительность загрузчика, т/ч.
При использовании перегрузочной технологии определяют производительность

Транспортёр навозоразбрасывателя
1 – брус рамы; 2 и 3 – ведущий
Транспортёр навозоразбрасывателя
1 – брус рамы; 2 и 3 – ведущий
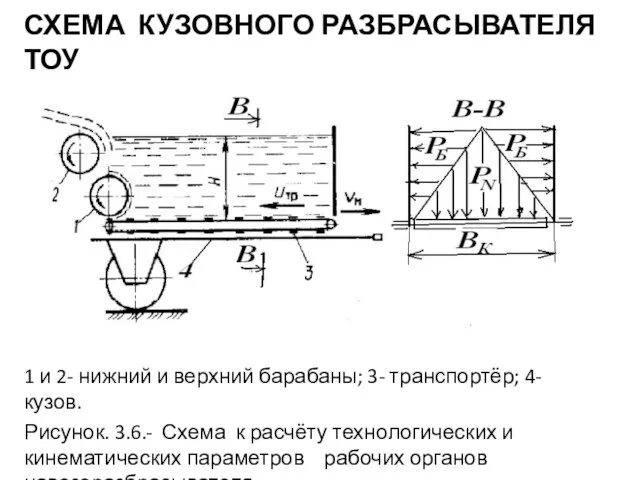
СХЕМА КУЗОВНОГО РАЗБРАСЫВАТЕЛЯ ТОУ
1 и 2- нижний и верхний барабаны; 3-
СХЕМА КУЗОВНОГО РАЗБРАСЫВАТЕЛЯ ТОУ
1 и 2- нижний и верхний барабаны; 3-
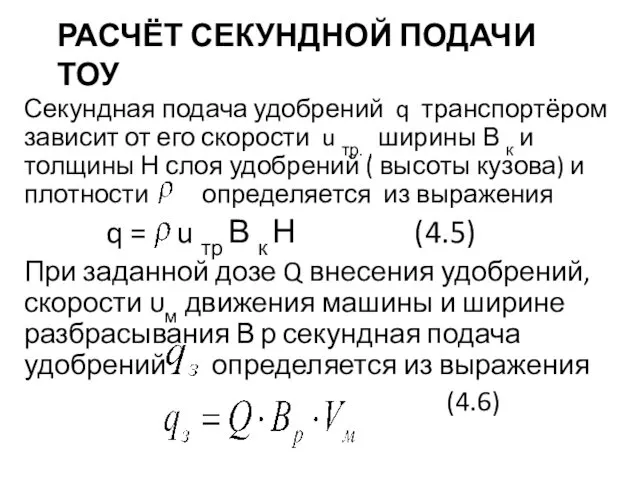
РАСЧЁТ СЕКУНДНОЙ ПОДАЧИ ТОУ
Секундная подача удобрений q транспортёром зависит от его
РАСЧЁТ СЕКУНДНОЙ ПОДАЧИ ТОУ
Секундная подача удобрений q транспортёром зависит от его
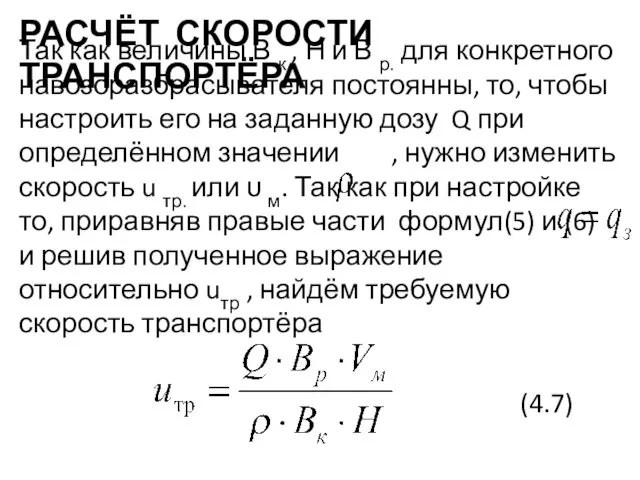
РАСЧЁТ СКОРОСТИ ТРАНСПОРТЁРА
Так как величины В к., Н и В р.
РАСЧЁТ СКОРОСТИ ТРАНСПОРТЁРА
Так как величины В к., Н и В р.
РЕЖИМ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ТРАНСПОРТЁРА
Таким образом, при изменении значения плотности органических удобрений
РЕЖИМ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ТРАНСПОРТЁРА
Таким образом, при изменении значения плотности органических удобрений
СИЛОВОЙ РАСЧЁТ ТРАНСПОРТЁРА
Общее сопротивление транспортера при продольном перемещении ТОУ к разбрасывающим
СИЛОВОЙ РАСЧЁТ ТРАНСПОРТЁРА
Общее сопротивление транспортера при продольном перемещении ТОУ к разбрасывающим
Сила сопротивления холостому ходу транспортера рассчитывается по формуле
где - линейная плотность
Сила сопротивления холостому ходу транспортера рассчитывается по формуле
где - линейная плотность
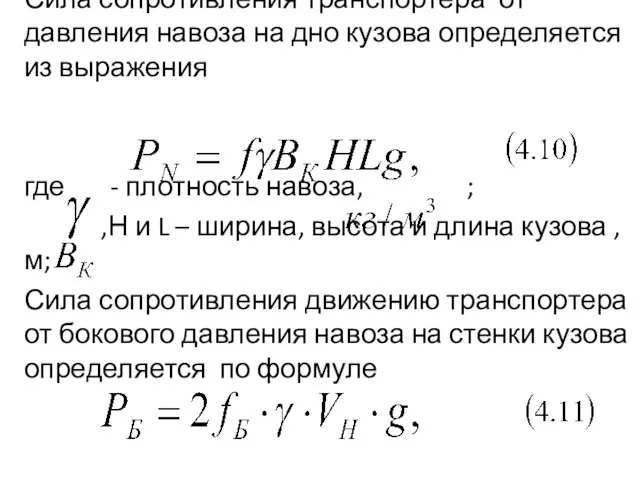
Сила сопротивления транспортера от давления навоза на дно кузова определяется из
Сила сопротивления транспортера от давления навоза на дно кузова определяется из
где - коэффициент бокового давления навоза на боковые стенки кузова;
-
где - коэффициент бокового давления навоза на боковые стенки кузова;
-
где - коэффициент, учитывающий перегрузку двигателя в момент пуска транспортера, =1,2…1,25
где - коэффициент, учитывающий перегрузку двигателя в момент пуска транспортера, =1,2…1,25
РАСЧЁТ РАЗБРАСЫВАЮЩЕГО УСТРОЙСТВА
Разбрасывающее устройство применяют двух видов: с осью вращения, параллельной
РАСЧЁТ РАЗБРАСЫВАЮЩЕГО УСТРОЙСТВА
Разбрасывающее устройство применяют двух видов: с осью вращения, параллельной
РАСЧЁТ РАЗБРАСЫВАЮЩЕГО БАРАБАНА
Для разбрасывания органических удобрений используют роторные устройства с горизонтальной
РАСЧЁТ РАЗБРАСЫВАЮЩЕГО БАРАБАНА
Для разбрасывания органических удобрений используют роторные устройства с горизонтальной
Во втором случае в качестве основного рабочего органа используют барабан (битер),
Во втором случае в качестве основного рабочего органа используют барабан (битер),
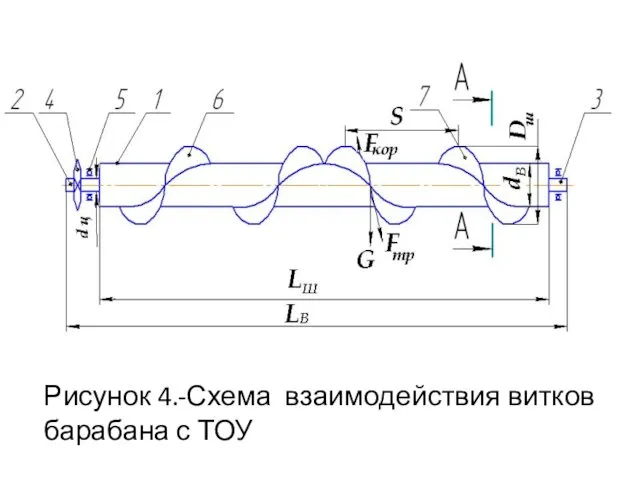
Рисунок 4.-Схема взаимодействия витков барабана с ТОУ
Рисунок 4.-Схема взаимодействия витков барабана с ТОУ

СЕЧЕНИЕ БАРАБАНА
Рисунок 5.-Действие сил в вертикальной плоскости
СЕЧЕНИЕ БАРАБАНА
Рисунок 5.-Действие сил в вертикальной плоскости
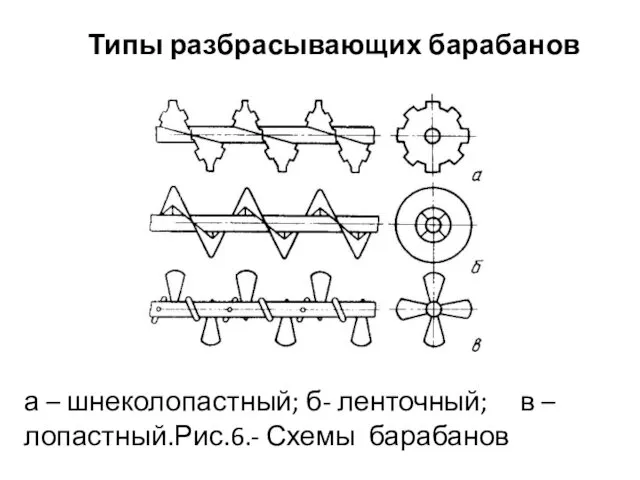
Типы разбрасывающих барабанов
а – шнеколопастный; б- ленточный; в – лопастный.Рис.6.-
Типы разбрасывающих барабанов
а – шнеколопастный; б- ленточный; в – лопастный.Рис.6.-
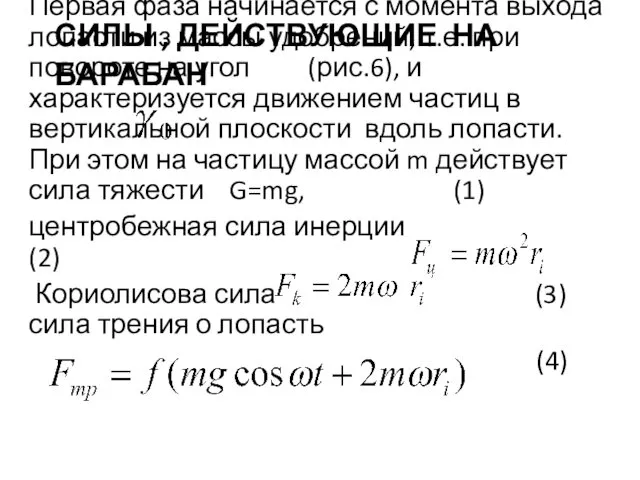
СИЛЫ , ДЕЙСТВУЮЩИЕ НА БАРАБАН
Первая фаза начинается с момента выхода лопасти
СИЛЫ , ДЕЙСТВУЮЩИЕ НА БАРАБАН
Первая фаза начинается с момента выхода лопасти

Процесс разбрасывания органических удобрений роторным аппаратом
а- действующие силы; б- схемы
Процесс разбрасывания органических удобрений роторным аппаратом
а- действующие силы; б- схемы
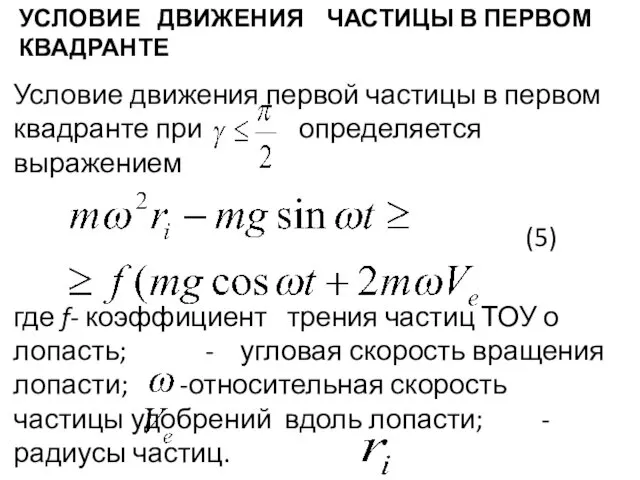
УСЛОВИЕ ДВИЖЕНИЯ ЧАСТИЦЫ В ПЕРВОМ КВАДРАНТЕ
Условие движения первой частицы в первом
УСЛОВИЕ ДВИЖЕНИЯ ЧАСТИЦЫ В ПЕРВОМ КВАДРАНТЕ
Условие движения первой частицы в первом
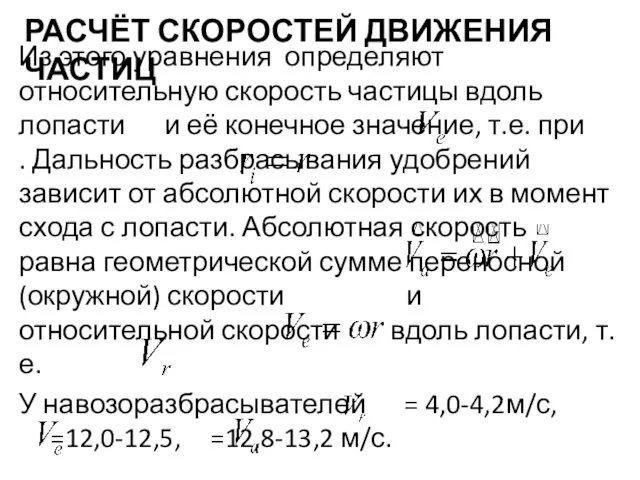
РАСЧЁТ СКОРОСТЕЙ ДВИЖЕНИЯ ЧАСТИЦ
Из этого уравнения определяют относительную скорость частицы вдоль
РАСЧЁТ СКОРОСТЕЙ ДВИЖЕНИЯ ЧАСТИЦ
Из этого уравнения определяют относительную скорость частицы вдоль
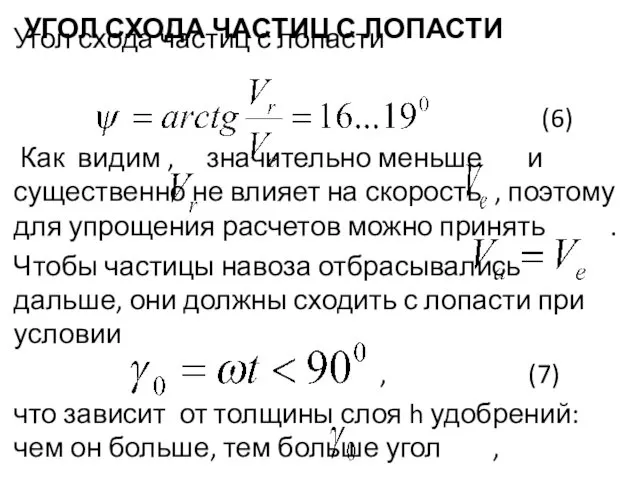
УГОЛ СХОДА ЧАСТИЦ С ЛОПАСТИ
Угол схода частиц с лопасти
. (6)
УГОЛ СХОДА ЧАСТИЦ С ЛОПАСТИ
Угол схода частиц с лопасти
. (6)
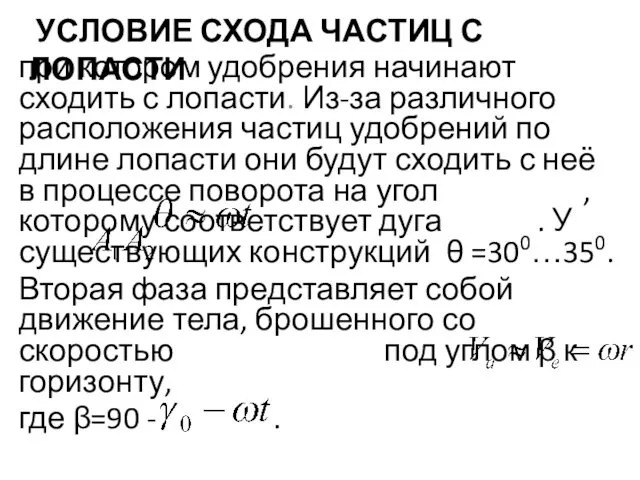
УСЛОВИЕ СХОДА ЧАСТИЦ С ЛОПАСТИ
при котором удобрения начинают сходить с
УСЛОВИЕ СХОДА ЧАСТИЦ С ЛОПАСТИ
при котором удобрения начинают сходить с
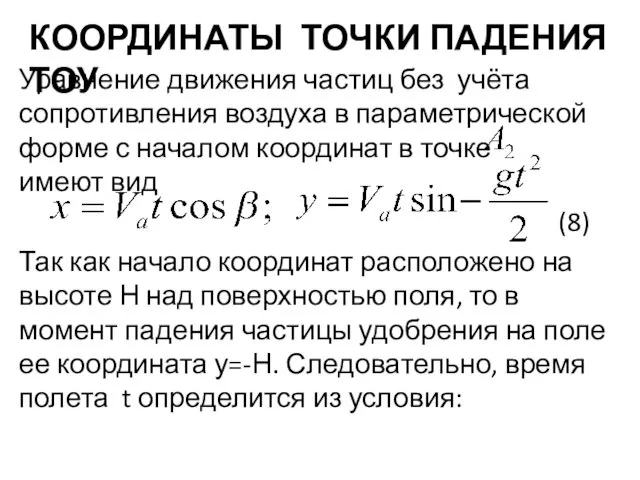
КООРДИНАТЫ ТОЧКИ ПАДЕНИЯ ТОУ
Уравнение движения частиц без учёта сопротивления воздуха в
КООРДИНАТЫ ТОЧКИ ПАДЕНИЯ ТОУ
Уравнение движения частиц без учёта сопротивления воздуха в
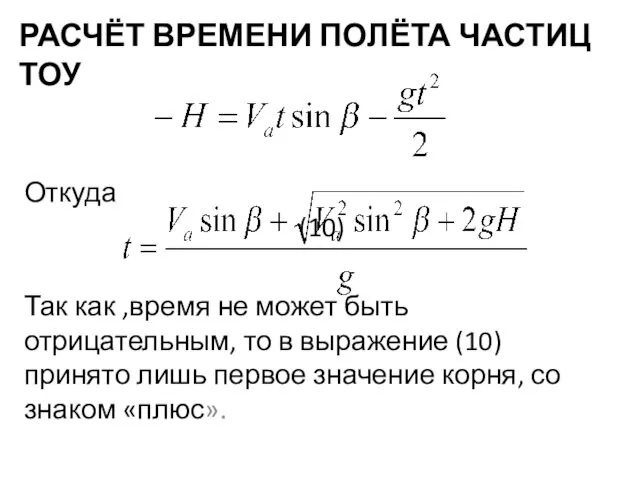
РАСЧЁТ ВРЕМЕНИ ПОЛЁТА ЧАСТИЦ ТОУ
Откуда (10)
Так как ,время не может быть
РАСЧЁТ ВРЕМЕНИ ПОЛЁТА ЧАСТИЦ ТОУ
Откуда (10)
Так как ,время не может быть
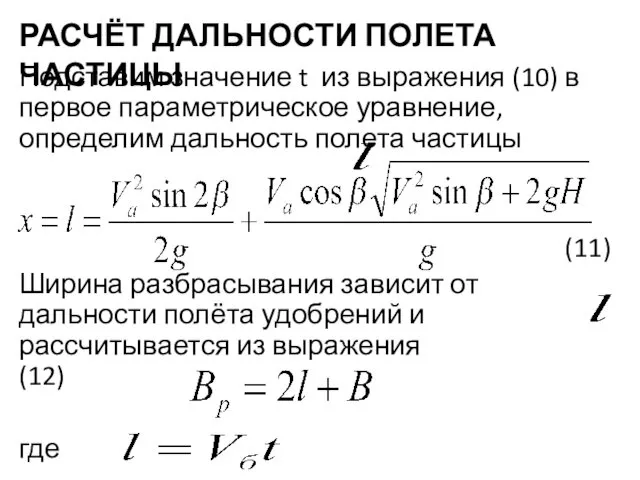
РАСЧЁТ ДАЛЬНОСТИ ПОЛЕТА ЧАСТИЦЫ
Подставим значение t из выражения (10) в
РАСЧЁТ ДАЛЬНОСТИ ПОЛЕТА ЧАСТИЦЫ
Подставим значение t из выражения (10) в
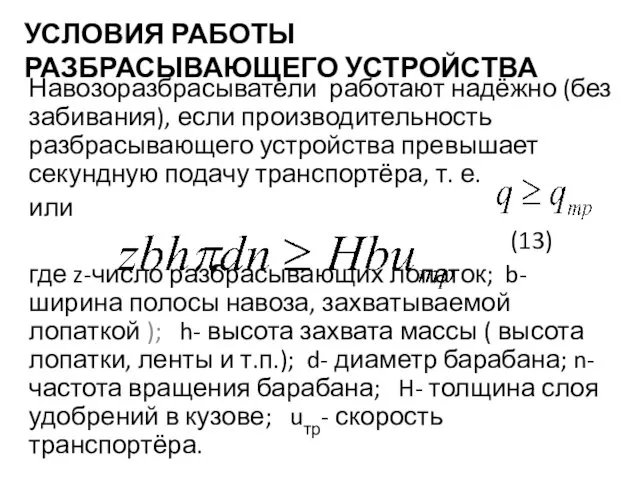
УСЛОВИЯ РАБОТЫ РАЗБРАСЫВАЮЩЕГО УСТРОЙСТВА
Навозоразбрасыватели работают надёжно (без забивания), если производительность
УСЛОВИЯ РАБОТЫ РАЗБРАСЫВАЮЩЕГО УСТРОЙСТВА
Навозоразбрасыватели работают надёжно (без забивания), если производительность
РАСЧЁТ ЧАСТОТЫ ВРАЩЕНИЯ РАЗБРАСЫВАЮЩЕГО БАРАБАНА
Из выражения (13) уточняем частоту вращения
РАСЧЁТ ЧАСТОТЫ ВРАЩЕНИЯ РАЗБРАСЫВАЮЩЕГО БАРАБАНА
Из выражения (13) уточняем частоту вращения
РАСЧЕТ ОПТИМАЛЬНОЙ ЧАСТОТЫ ВРАЩЕНИЯ БАРАБАНА
Оптимальную частоту вращения разбрасывающего барабана ( битера)
РАСЧЕТ ОПТИМАЛЬНОЙ ЧАСТОТЫ ВРАЩЕНИЯ БАРАБАНА
Оптимальную частоту вращения разбрасывающего барабана ( битера)
РАСЧЕТ ДО ИЗМЕЛЬЧАЮЩЕГО БАРАБАНА
Отличительной особенностью расчета нижнего барабана состоит в определении
РАСЧЕТ ДО ИЗМЕЛЬЧАЮЩЕГО БАРАБАНА
Отличительной особенностью расчета нижнего барабана состоит в определении
Момент резания
Вращающий момент
Мощность необходимая на привод до измельчающего барабана
Момент резания
Вращающий момент
Мощность необходимая на привод до измельчающего барабана
РАСЧЕТ РАБОЧИХ ОРГАНОВ ВНЕСЕНИЯ МИНЕРАЛЬНЫХ УДОБРЕНИЙ
Разбрасывающие диски с вертикальными осями вращения
РАСЧЕТ РАБОЧИХ ОРГАНОВ ВНЕСЕНИЯ МИНЕРАЛЬНЫХ УДОБРЕНИЙ
Разбрасывающие диски с вертикальными осями вращения
УСЛОВИЕ ДВИЖЕНИЯ УДОБРЕНИЙ ДО ВСТРЕЧИ С ЛОПАСТЬЮ
Условие движения удобрений до
УСЛОВИЕ ДВИЖЕНИЯ УДОБРЕНИЙ ДО ВСТРЕЧИ С ЛОПАСТЬЮ
Условие движения удобрений до
ДВИЖЕНИЕ ГРАНУЛЫ ПО НЕКОТОРОЙ КРИВОЙ
Согласно экспериментальным данным упавшая на вращающийся диск
ДВИЖЕНИЕ ГРАНУЛЫ ПО НЕКОТОРОЙ КРИВОЙ
Согласно экспериментальным данным упавшая на вращающийся диск
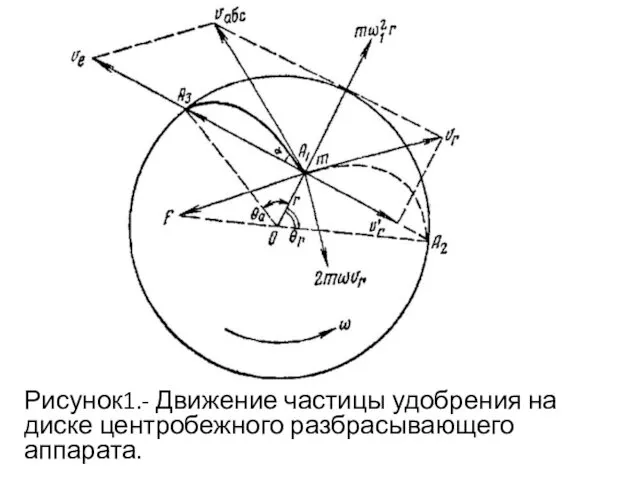
Рисунок1.- Движение частицы удобрения на диске центробежного разбрасывающего аппарата.
Рисунок1.- Движение частицы удобрения на диске центробежного разбрасывающего аппарата.
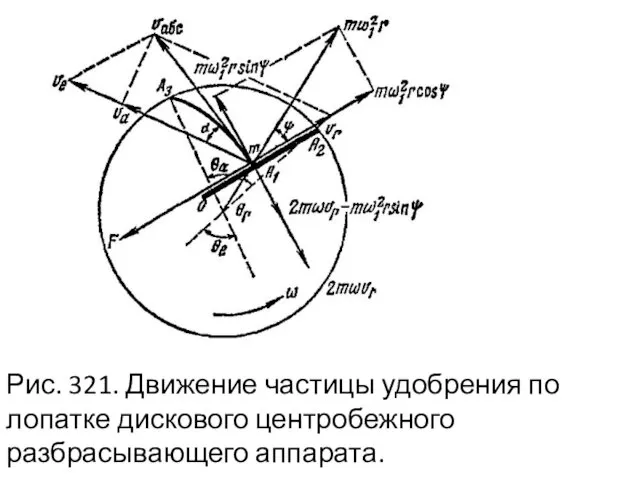
Рис. 321. Движение частицы удобрения по лопатке дискового центробежного разбрасывающего аппарата.
Рис. 321. Движение частицы удобрения по лопатке дискового центробежного разбрасывающего аппарата.
а – силы действующие на гранулу
Схемы к расчёту процесса рассеивания
а – силы действующие на гранулу
Схемы к расчёту процесса рассеивания
РАСЧЁТ СИЛ, ДЕЙСТВУЮЩИХ НА ГРАНУЛУ
Сила Кориолиса
Сила трения о диск,
Сила
РАСЧЁТ СИЛ, ДЕЙСТВУЮЩИХ НА ГРАНУЛУ
Сила Кориолиса
Сила трения о диск,
Сила
ОБОЗНАЧЕНИЕ ВЕЛИЧИН ВЫРАЖЕНИЯ (6)
- относительная скорость скольжения гранулы вдоль лопасти;
ОБОЗНАЧЕНИЕ ВЕЛИЧИН ВЫРАЖЕНИЯ (6)
- относительная скорость скольжения гранулы вдоль лопасти;
АБСОЛЮТНАЯ СКОРОСТЬ ГРАНУЛЫ В МОМЕНТ СХОДА С ЛОПАСТИ
Абсолютная скорость в момент
АБСОЛЮТНАЯ СКОРОСТЬ ГРАНУЛЫ В МОМЕНТ СХОДА С ЛОПАСТИ
Абсолютная скорость в момент
При радиальном положении лопастей
= 0 и абсолютная скорость
Однако
При радиальном положении лопастей
= 0 и абсолютная скорость
Однако
СИЛЫ , ДЕЙСТВУЮЩИЕ НА ГРАНУЛУ В МОМЕНТ СХОДА С ЛОПАСТИ
Вторая фаза
СИЛЫ , ДЕЙСТВУЮЩИЕ НА ГРАНУЛУ В МОМЕНТ СХОДА С ЛОПАСТИ
Вторая фаза
Силы , действующие на гранулу при сходе с лопасти
Рисунок 2.-Схема к
Силы , действующие на гранулу при сходе с лопасти
Рисунок 2.-Схема к
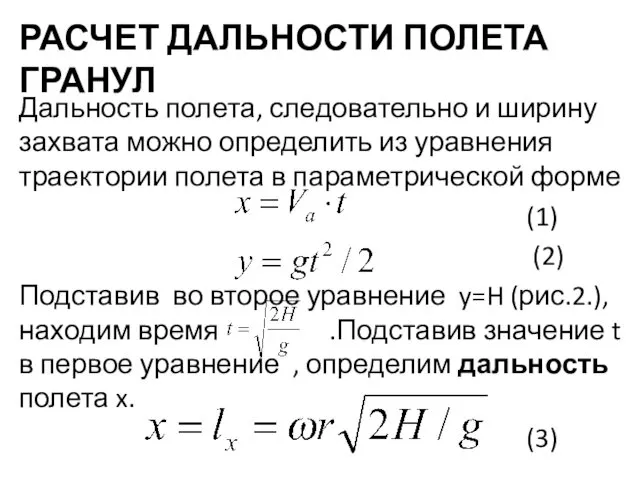
РАСЧЕТ ДАЛЬНОСТИ ПОЛЕТА ГРАНУЛ
Дальность полета, следовательно и ширину захвата можно
РАСЧЕТ ДАЛЬНОСТИ ПОЛЕТА ГРАНУЛ
Дальность полета, следовательно и ширину захвата можно
СПОСОБЫ УВЕЛИЧЕНИЯ ДАЛЬНОСТИ ПОЛЕТА ГРАНУЛ
Для увеличения дальности полета гранул в некоторых
СПОСОБЫ УВЕЛИЧЕНИЯ ДАЛЬНОСТИ ПОЛЕТА ГРАНУЛ
Для увеличения дальности полета гранул в некоторых
Зона разбрасывания удобрений (вид сверху)
Рисунок 3.- Схема к расчёту процесса разбрасывания
Зона разбрасывания удобрений (вид сверху)
Рисунок 3.- Схема к расчёту процесса разбрасывания
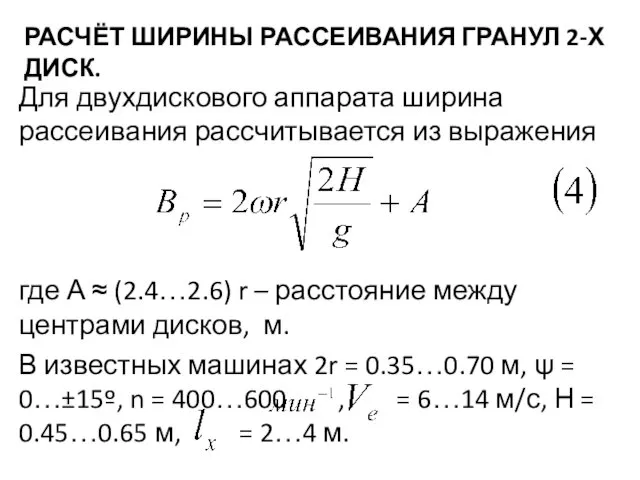
РАСЧЁТ ШИРИНЫ РАССЕИВАНИЯ ГРАНУЛ 2-Х ДИСК.
Для двухдискового аппарата ширина рассеивания рассчитывается
РАСЧЁТ ШИРИНЫ РАССЕИВАНИЯ ГРАНУЛ 2-Х ДИСК.
Для двухдискового аппарата ширина рассеивания рассчитывается
ОСНОВНЫЕ ТЕНДЕНЦИИ РАЗВИТИЯ КОНСТРУКЦИЙ МАШИН ДЛЯ ВНЕСЕНИЯ УДОБРЕНИЙ
В настоящее время около
ОСНОВНЫЕ ТЕНДЕНЦИИ РАЗВИТИЯ КОНСТРУКЦИЙ МАШИН ДЛЯ ВНЕСЕНИЯ УДОБРЕНИЙ
В настоящее время около
Особенностью современного периода развития этой группы машин является разработка конструкций, позволяющих
Особенностью современного периода развития этой группы машин является разработка конструкций, позволяющих
в реальном масштабе времени на основе показаний оптических датчиков или
в реальном масштабе времени на основе показаний оптических датчиков или
1-компьютер; 2 – устройство распределительное; 3 - разбрасыватель удобрений; 4,5 –
1-компьютер; 2 – устройство распределительное; 3 - разбрасыватель удобрений; 4,5 –
Наиболее простые из них регистрируют только содержание бункера разбрасывателя при остановке
Наиболее простые из них регистрируют только содержание бункера разбрасывателя при остановке
Компьютер также подает предупредительный сигнал, если заданная норма внесения недосягаема (например,
Компьютер также подает предупредительный сигнал, если заданная норма внесения недосягаема (например,
— координатного земледелия с использованием спутниковых навигационных систем. Они отличаются только
— координатного земледелия с использованием спутниковых навигационных систем. Они отличаются только
У разбрасывателей с гидроприводом разбрасывающих дисков существует прямая связь между приводным
У разбрасывателей с гидроприводом разбрасывающих дисков существует прямая связь между приводным
Для определения локальной потребности в азоте успешно применяют оптические сенсоры. Они
Для определения локальной потребности в азоте успешно применяют оптические сенсоры. Они
содержание азота в растениях бесконтактным способом и позволяют управлять нормой внесения
содержание азота в растениях бесконтактным способом и позволяют управлять нормой внесения
Автоматические взвешивающие системы используются и в конструкции широкозахватных разбрасывателей минеральных удобрений,
Автоматические взвешивающие системы используются и в конструкции широкозахватных разбрасывателей минеральных удобрений,

Автоматические взвешивающие системы используются и в конструкции широкозахватных разбрасывателей минеральных удобрений,
Автоматические взвешивающие системы используются и в конструкции широкозахватных разбрасывателей минеральных удобрений,
Автоматические взвешивающие системы используются и в конструкции широкозахватных разбрасывателей минеральных удобрений,
Автоматические взвешивающие системы используются и в конструкции широкозахватных разбрасывателей минеральных удобрений,
наличием прочного бункера с боковым усилением, ленточного транспортера с автоматическим управлением,
наличием прочного бункера с боковым усилением, ленточного транспортера с автоматическим управлением,
как счетчик обработанной площади. Конструктивными особенностями являются наличие двойного воронкообразного бункера
как счетчик обработанной площади. Конструктивными особенностями являются наличие двойного воронкообразного бункера
 Как звери и птицы готовятся к холодам
Как звери и птицы готовятся к холодам Что такое техническое задание и как его разрабатывать
Что такое техническое задание и как его разрабатывать ИСТОРИЯ РАЗВИТИЯ СМК
ИСТОРИЯ РАЗВИТИЯ СМК Цифровые системы управления
Цифровые системы управления Волоконна оптика
Волоконна оптика Нейтронный гамма каротаж
Нейтронный гамма каротаж Смешанное обучение. Ротация станций
Смешанное обучение. Ротация станций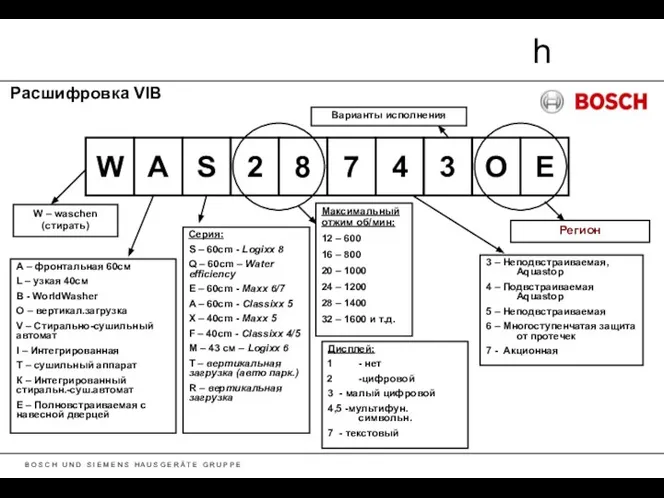 Расшифровка VIB. Стиральные машины (декабрь 2010)
Расшифровка VIB. Стиральные машины (декабрь 2010) Требования к проверке и оценке знаний
Требования к проверке и оценке знаний Книги читати – усе знати
Книги читати – усе знати С днем рождения, Люда
С днем рождения, Люда Мережина Н Г
Мережина Н Г Вкус и польза шоколада
Вкус и польза шоколада Малыш, заколдованный снежной королевой
Малыш, заколдованный снежной королевой Артикуляционная гимнастика в стихах Сказка У бабушки с дедушкой
Артикуляционная гимнастика в стихах Сказка У бабушки с дедушкой Carsharing
Carsharing Основные показатели надежности
Основные показатели надежности Распространённые и нераспространённые предложения
Распространённые и нераспространённые предложения Наставничество сварщиков эффективным способам сварки и методам их механизации в реальных условиях
Наставничество сварщиков эффективным способам сварки и методам их механизации в реальных условиях Методика моделирования генераторов псевдослучайных последовательностей
Методика моделирования генераторов псевдослучайных последовательностей Данил Хасаншин Презентация2
Данил Хасаншин Презентация2 Basic raw materials of food industry
Basic raw materials of food industry Затейка-грамотейка
Затейка-грамотейка Важнейшие архитектурные элементы здания
Важнейшие архитектурные элементы здания 20160319_prilozhenie_3
20160319_prilozhenie_3 Стандарт ISO 22000
Стандарт ISO 22000 Дніпровська ГЕС
Дніпровська ГЕС Prezentatsia1
Prezentatsia1