- Принципы построения систем управления

Содержание
- 2. Частный случай управления – сохранение некоторого желаемого состояния объекта в условиях, когда он получает непредвиденные воздействия
- 3. Рисунок 1.1 - Объект управления, как «чёрный ящик» у (t) - отображает численные характеристики целей управления
- 4. Изменение управляемых или выходных величин в соответствии с целью управления осуществляется подачей на объект специально организуемых
- 5. Возмущающие воздействия или возмущения подразделяются на возмущения контролируемые управляемые, контролируемые неуправляемые и возмущения неконтролируемые неуправляемые. В
- 6. Схематическое изображение отдельных элементов системы и воздействий их друг на друга, а также воздействий, получаемых системой
- 7. Рисунок 1.2 - Простейшая структурная схема системы управления (Разомкнутая САУ). Здесь контроллер КН, получая информацию о
- 8. Y(t) = X(t). (1.1) Подобная система управления может реально функционировать только тогда, когда между изменением Y(t)
- 9. Результатом идентификации является математическая модель процесса или объекта, представляющая собой или график переходного процесса, или передаточную
- 10. Алгоритм определяет, как следует изменить управляющее воздействие м(t) в зависимости от изменения X(t) для того, чтобы
- 11. Для исключения этого в систему управления вводится добавочный канал, по которому контроллер получает информацию о действительном
- 12. Рисунок 1.3 - Простейшая структурная схема замкнутой системы управления.
- 13. В зависимости от характера изменения сигнала задания ( задающего воздействия) системы управления принято разделять на три
- 14. Управление называется непрерывным, если осуществляемое контроллером изменение управляющего воздействия происходит в непрерывной зависимости от изменения задающего
- 15. Решение задачи оптимизации для всего технологического процесса объекта, в целом, трудоемко, или практически невозможно ввиду большого
- 16. Из общей задачи управления выделяется задача устранения вредного влияния на достижение цели управления действующих на объект
- 17. В результате контроллер расчленяется на два соподчинённых блока: регулирующий (обычно называют автоматическим регулятором или просто регулятором)
- 18. Командное воздействие u(t), вырабатываемое командным блоком, подаётся на вход подсистемы регулирования (штриховая линия), где на основании
- 19. Рассмотренная система управления является двухуровневой: первый (нижний) уровень образует подсистема регулирования, второй – система управления со
- 20. В реальных системах управления технологическими процессами цель управления, определяемая формулой (1.1), практически никогда не выполняется точно.
- 21. Физически неполнота рабочей информации о состоянии объекта обусловлена тем, что регулятор контролирует лишь конечный эффект действия
- 22. Неполнота рабочей информации о текущем состоянии объекта может быть в значительной степени устранена если осуществлять непосредственный
- 23. Рисунок 1.5 - Структурная схема системы регулирования с компенсацией возмущения. Контроль и управление с компенсацией каждого
- 24. Контролируемые неуправляемые возмущения – это возмущения, которые можно измерить, но не возможно или недопустимо стабилизировать. Неконтролируемые
- 25. Рисунок 1.6 – Структурная схема каскадной системы регулирования с двумя регуляторами В каскадной схеме регулирование осуществляется
- 26. Первый регулятор, контролируя основную регулируемую величину у(t), формирует командное воздействие uz(t) для второго, который на основании
- 27. Рисунок 1.7 – Структурная схема каскадной системы регулирования с формирующим блоком для вспомогательной регулируемой величины.
- 28. Контроль каждой вспомогательной регулируемой величины объекта приводит к созданию дополнительного контура регулирования. Системы с несколькими замкнутыми
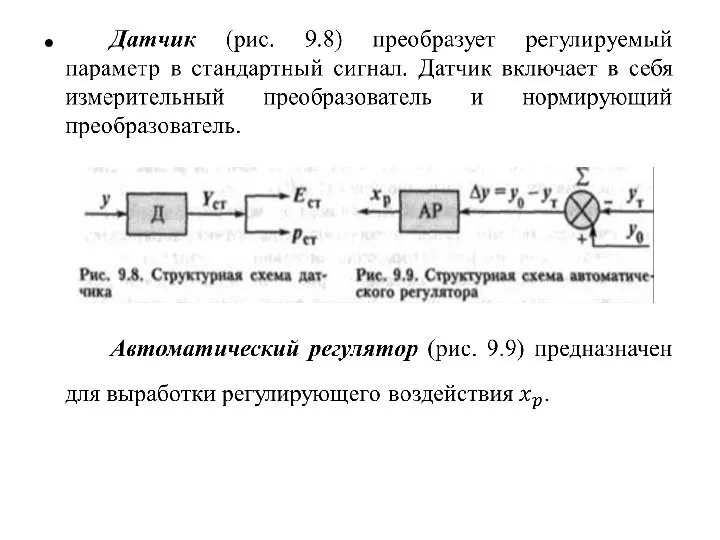
- 30. Основными элементами САР являются: измерительный преобразователь, нормирующий преобразователь, датчик, контроллер или автоматический регулятор, исполнительное устройство. Измерительный
- 31. Примером измерительного преобразователя может служить термопара. Входным параметром термопары является температура в градусах Цельсия (°С), а
- 32. Нормирующий преобразователь предназначен для получения стандартного (унифицированного) сигнала. В нормирующих преобразователях для преобразования используются дополнительные источники
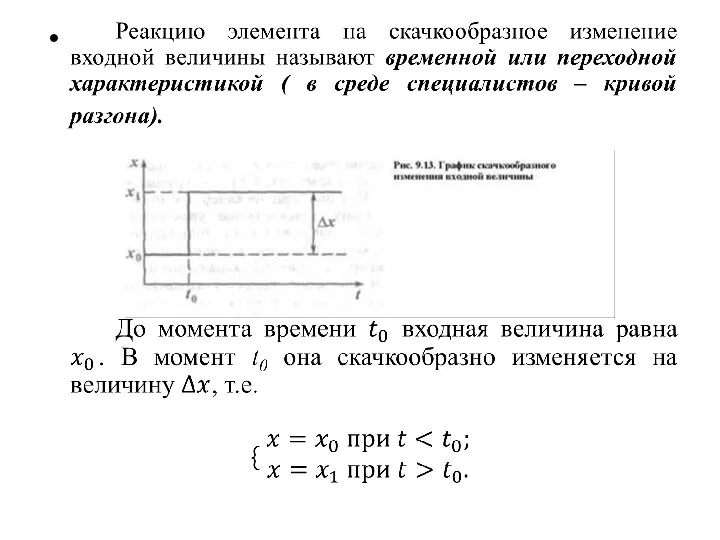
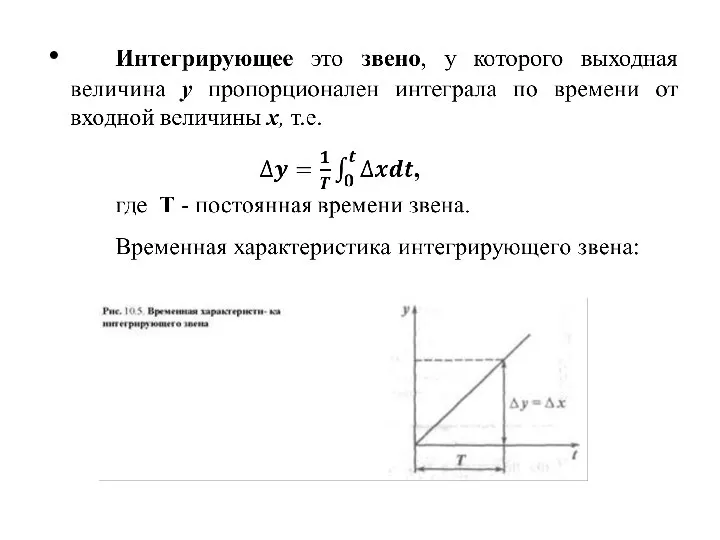
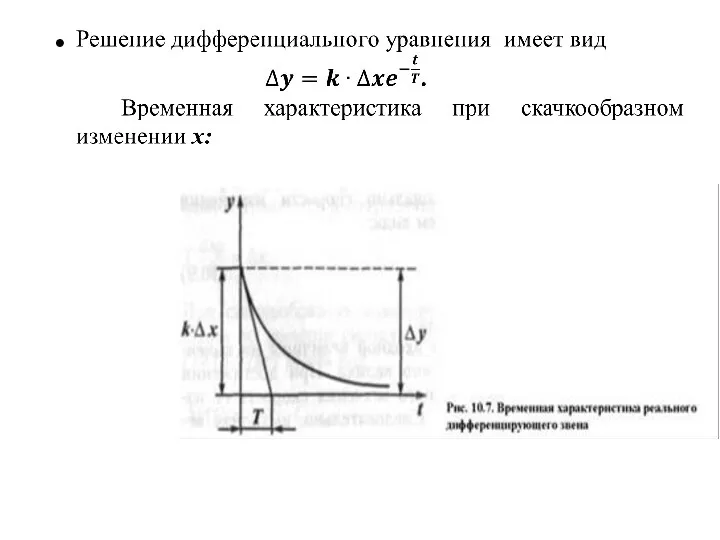
- 39. Динамической характеристикой элемента называют функцию y(t) - изменение во времени выходной величины у при скачкообразном изменении
- 41. По кривой разгона, посредством её аппроксимации, получается дифференциальное уравнение, которое является математической моделью элемента. В практике
- 42. 4. Устойчивость и качество САР 4.1 Типовые динамические звенья Для исследования различных по природе и конструкции
- 43. Динамические звенья называют элементарными, так как они не могут быть разложены на более простые. А так
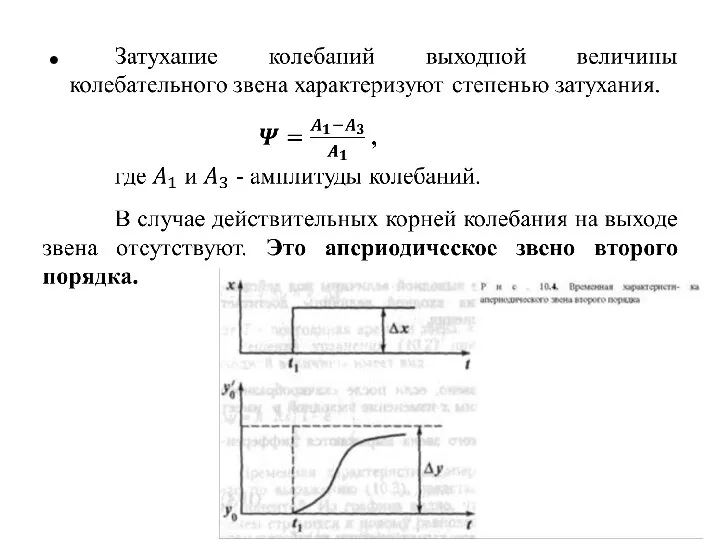
- 46. Переходный процесс заканчивается за время, в течение которого отклонение у достигает 95 % от максимального отклонения,
- 47. Постоянную времени Т звена можно определить из временной характеристики. Если провести касательную до пересечения с прямой,
- 49. При решении уравнения корни характеристического уравнения получаются в виде комплексных или действительных чисел. Выходная величина у
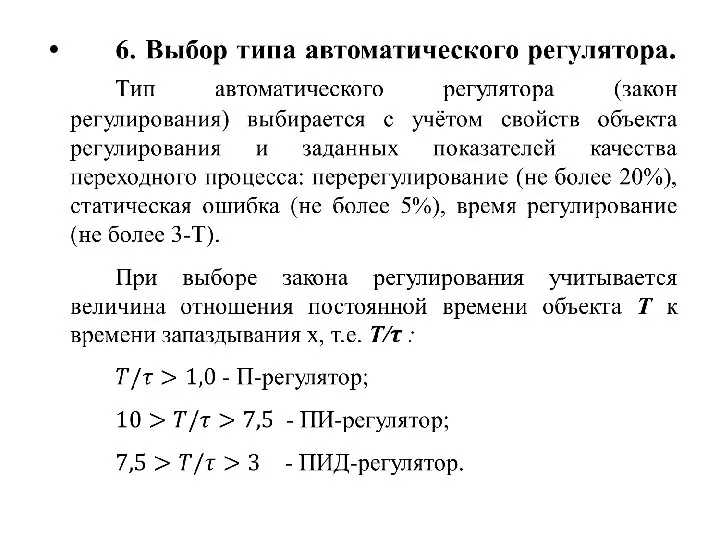
- 59. При возмущающих воздействиях П - регулятор приводит объект в равновесное состояние, но со статической ошибкой. Основным
- 69. Скачать презентацию
Частный случай управления – сохранение некоторого желаемого состояния объекта в условиях,
Частный случай управления – сохранение некоторого желаемого состояния объекта в условиях,
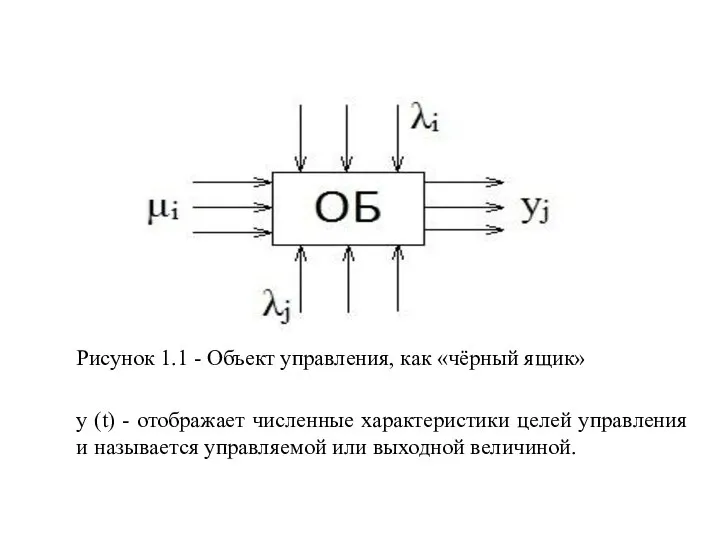
Рисунок 1.1 - Объект управления, как «чёрный ящик»
у (t) - отображает
Рисунок 1.1 - Объект управления, как «чёрный ящик»
у (t) - отображает
Изменение управляемых или выходных величин в соответствии с целью управления осуществляется
Изменение управляемых или выходных величин в соответствии с целью управления осуществляется
Возмущающие воздействия или возмущения подразделяются на возмущения контролируемые управляемые, контролируемые неуправляемые
Возмущающие воздействия или возмущения подразделяются на возмущения контролируемые управляемые, контролируемые неуправляемые
Схематическое изображение отдельных элементов системы и воздействий их друг на друга,
Схематическое изображение отдельных элементов системы и воздействий их друг на друга,
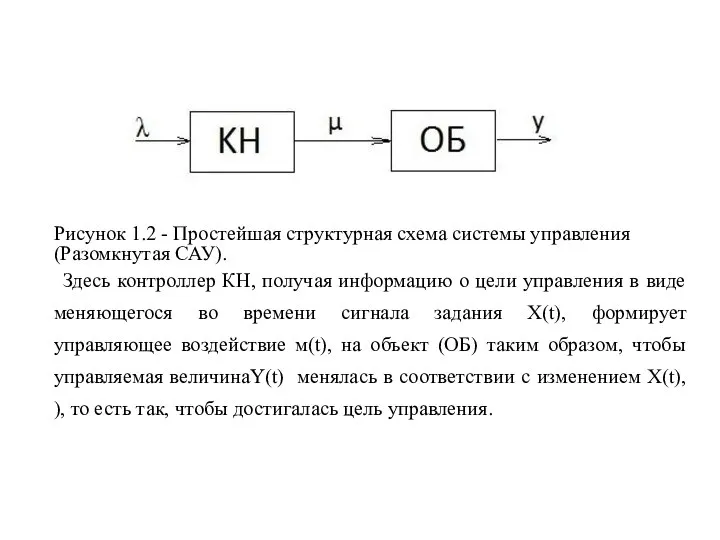
Рисунок 1.2 - Простейшая структурная схема системы управления (Разомкнутая САУ).
Здесь контроллер
Рисунок 1.2 - Простейшая структурная схема системы управления (Разомкнутая САУ).
Здесь контроллер
Y(t) = X(t). (1.1)
Подобная система управления может реально функционировать только тогда, когда
Y(t) = X(t). (1.1)
Подобная система управления может реально функционировать только тогда, когда
Результатом идентификации является математическая модель процесса или объекта, представляющая собой или
Результатом идентификации является математическая модель процесса или объекта, представляющая собой или
Алгоритм определяет, как следует изменить управляющее воздействие м(t) в зависимости от изменения
Алгоритм определяет, как следует изменить управляющее воздействие м(t) в зависимости от изменения
Для исключения этого в систему управления вводится добавочный канал, по которому
Для исключения этого в систему управления вводится добавочный канал, по которому
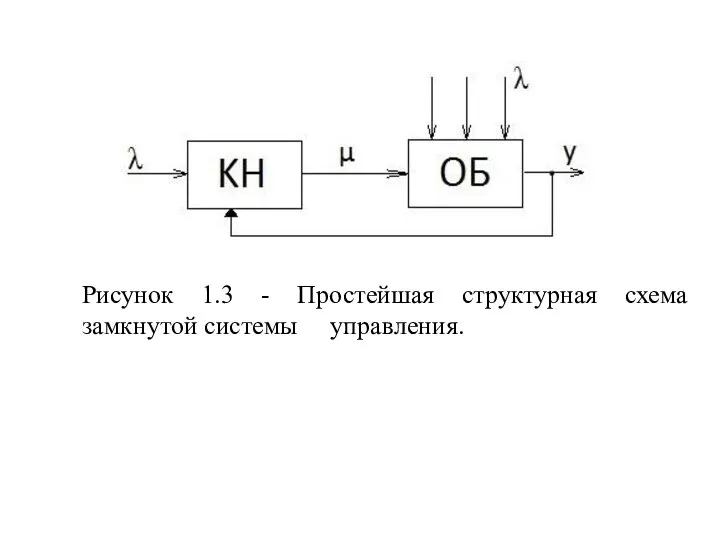
Рисунок 1.3 - Простейшая структурная схема замкнутой системы управления.
Рисунок 1.3 - Простейшая структурная схема замкнутой системы управления.
В зависимости от характера изменения сигнала задания ( задающего воздействия) системы
Управление называется непрерывным, если осуществляемое контроллером изменение управляющего воздействия происходит в
Решение задачи оптимизации для всего технологического процесса объекта, в целом, трудоемко,
Решение задачи оптимизации для всего технологического процесса объекта, в целом, трудоемко,
Из общей задачи управления выделяется задача устранения вредного влияния на достижение
Из общей задачи управления выделяется задача устранения вредного влияния на достижение
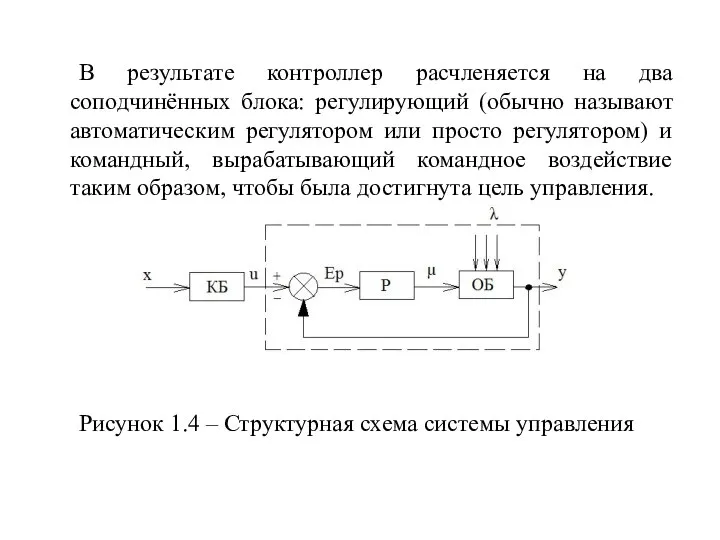
В результате контроллер расчленяется на два соподчинённых блока: регулирующий (обычно
В результате контроллер расчленяется на два соподчинённых блока: регулирующий (обычно
Командное воздействие u(t), вырабатываемое командным блоком, подаётся на вход подсистемы регулирования
Командное воздействие u(t), вырабатываемое командным блоком, подаётся на вход подсистемы регулирования
Рассмотренная система управления является двухуровневой: первый (нижний) уровень образует подсистема регулирования,
Рассмотренная система управления является двухуровневой: первый (нижний) уровень образует подсистема регулирования,
В реальных системах управления технологическими процессами цель управления, определяемая формулой (1.1),
В реальных системах управления технологическими процессами цель управления, определяемая формулой (1.1),
Физически неполнота рабочей информации о состоянии объекта обусловлена тем, что регулятор
Физически неполнота рабочей информации о состоянии объекта обусловлена тем, что регулятор
Неполнота рабочей информации о текущем состоянии объекта может быть в значительной
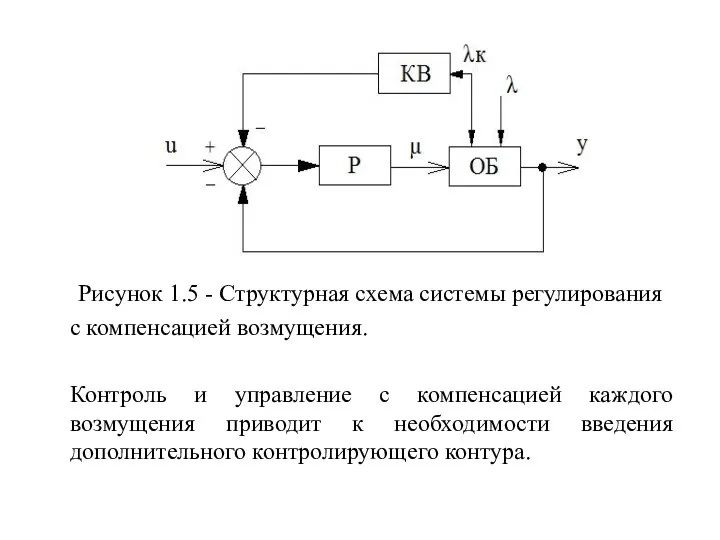
Рисунок 1.5 - Структурная схема системы регулирования
с компенсацией возмущения.
Контроль и
Рисунок 1.5 - Структурная схема системы регулирования
с компенсацией возмущения.
Контроль и
Контролируемые неуправляемые возмущения – это возмущения, которые можно измерить, но не
Контролируемые неуправляемые возмущения – это возмущения, которые можно измерить, но не
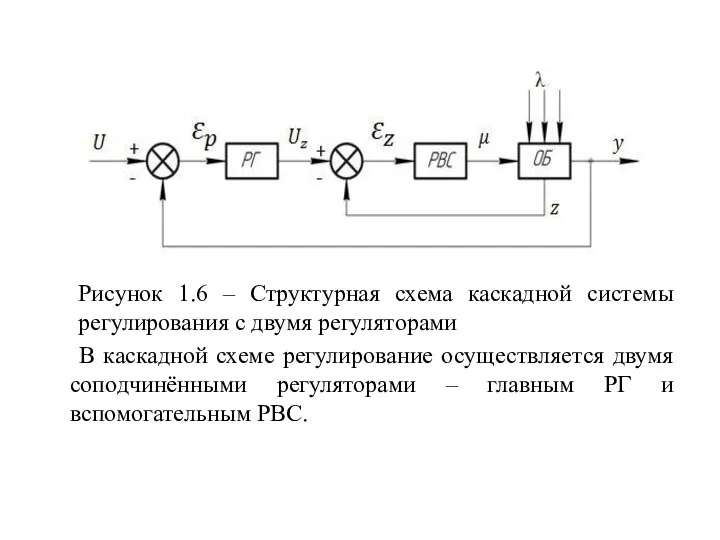
Рисунок 1.6 – Структурная схема каскадной системы регулирования с двумя регуляторами
В
Рисунок 1.6 – Структурная схема каскадной системы регулирования с двумя регуляторами
В
Первый регулятор, контролируя основную регулируемую величину у(t), формирует командное воздействие uz(t)
Первый регулятор, контролируя основную регулируемую величину у(t), формирует командное воздействие uz(t)
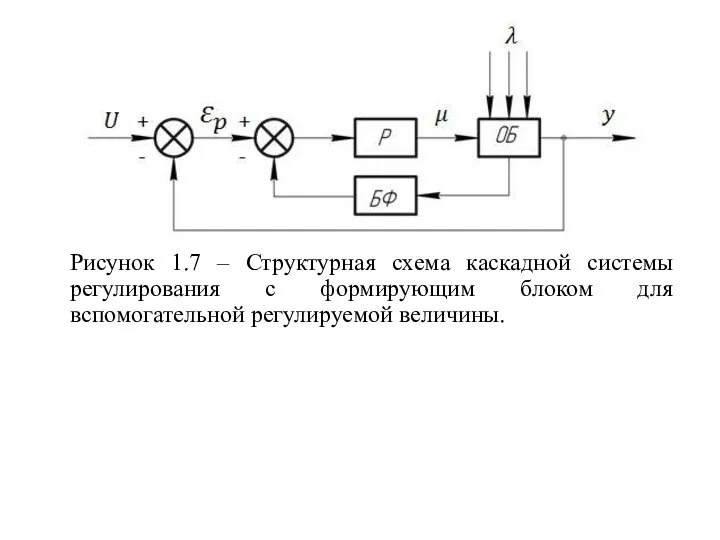
Рисунок 1.7 – Структурная схема каскадной системы регулирования с формирующим блоком
Рисунок 1.7 – Структурная схема каскадной системы регулирования с формирующим блоком
Контроль каждой вспомогательной регулируемой величины объекта приводит к созданию дополнительного контура
Контроль каждой вспомогательной регулируемой величины объекта приводит к созданию дополнительного контура

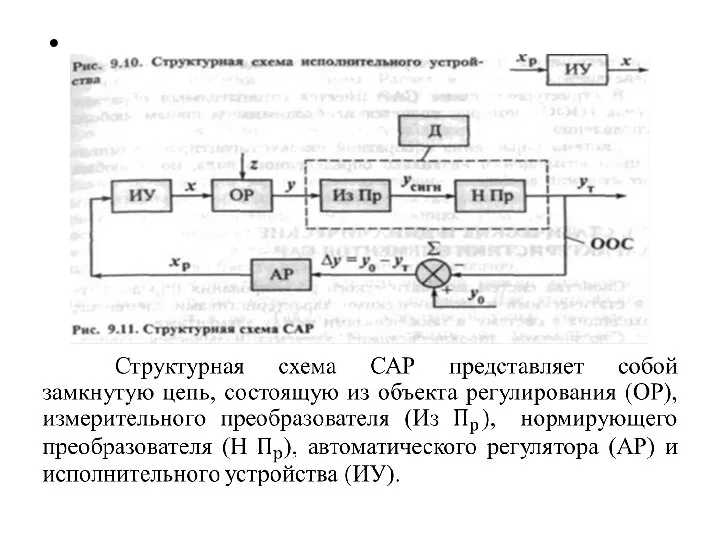
Основными элементами САР являются: измерительный преобразователь, нормирующий преобразователь, датчик, контроллер или
Основными элементами САР являются: измерительный преобразователь, нормирующий преобразователь, датчик, контроллер или

Примером измерительного преобразователя может служить термопара. Входным параметром термопары является температура
Примером измерительного преобразователя может служить термопара. Входным параметром термопары является температура
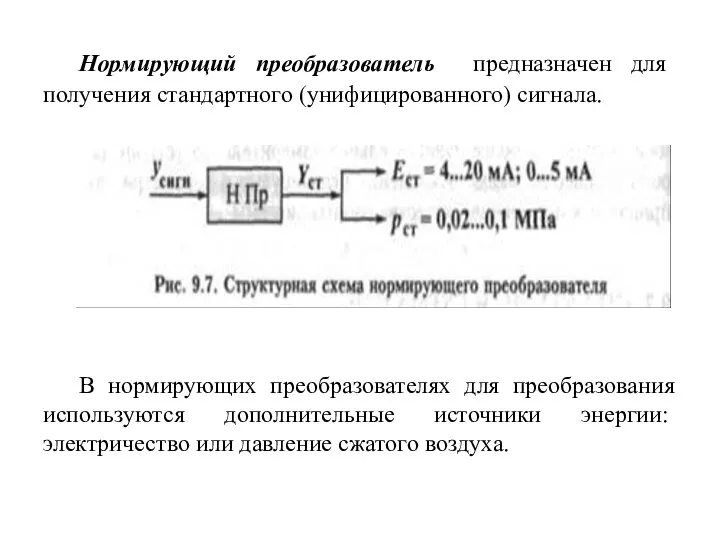
Нормирующий преобразователь предназначен для получения стандартного (унифицированного) сигнала.
В нормирующих преобразователях
Нормирующий преобразователь предназначен для получения стандартного (унифицированного) сигнала.
В нормирующих преобразователях


Динамической характеристикой элемента называют функцию y(t) - изменение во времени выходной
Динамической характеристикой элемента называют функцию y(t) - изменение во времени выходной
По кривой разгона, посредством её аппроксимации, получается дифференциальное уравнение, которое является
По кривой разгона, посредством её аппроксимации, получается дифференциальное уравнение, которое является
4. Устойчивость и качество САР
4.1 Типовые динамические звенья
Для исследования различных по
4. Устойчивость и качество САР
4.1 Типовые динамические звенья
Для исследования различных по
Динамические звенья называют элементарными, так как они не могут быть разложены
Динамические звенья называют элементарными, так как они не могут быть разложены
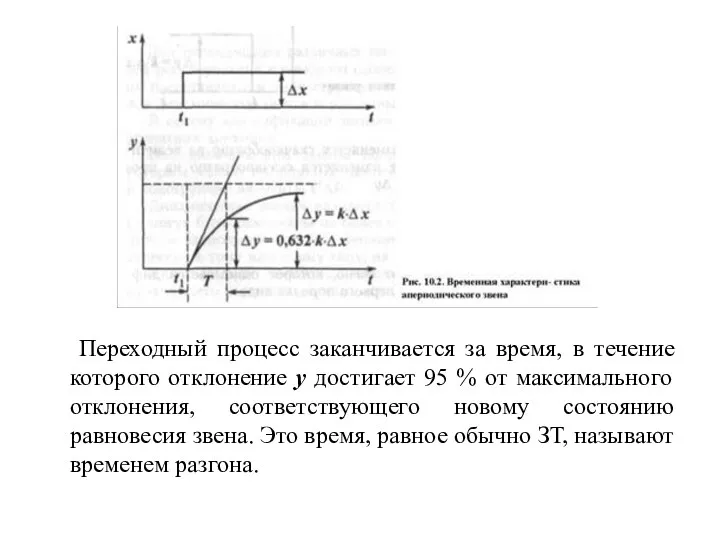
Переходный процесс заканчивается за время, в течение которого отклонение у достигает
Переходный процесс заканчивается за время, в течение которого отклонение у достигает
Постоянную времени Т звена можно определить из временной характеристики. Если провести
Постоянную времени Т звена можно определить из временной характеристики. Если провести
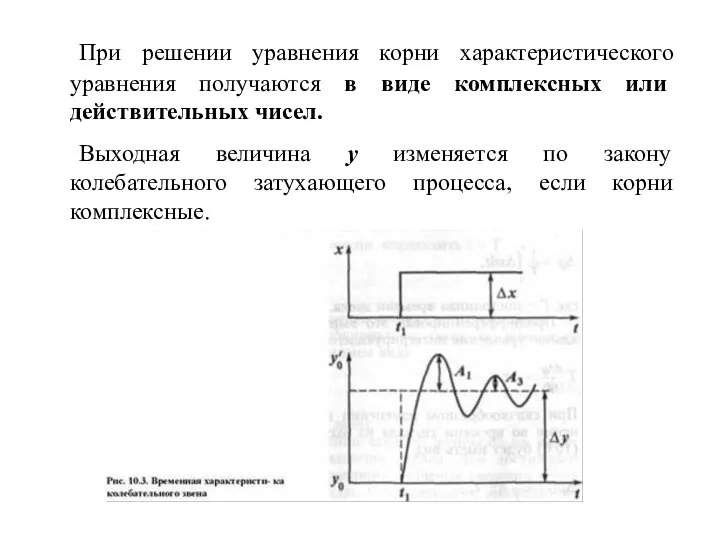
При решении уравнения корни характеристического уравнения получаются в виде комплексных или
При решении уравнения корни характеристического уравнения получаются в виде комплексных или
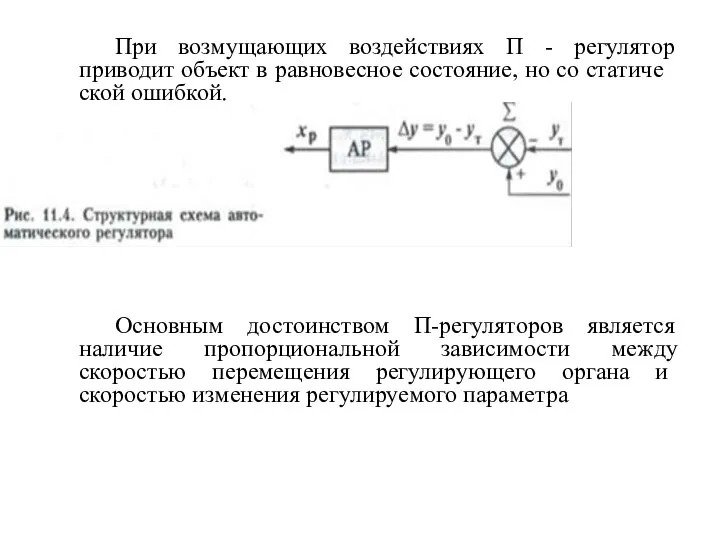
При возмущающих воздействиях П - регулятор приводит объект в равновесное состояние,
При возмущающих воздействиях П - регулятор приводит объект в равновесное состояние,
 Производственный менеджмент. Понятие и сущность производственного менеджмента
Производственный менеджмент. Понятие и сущность производственного менеджмента Еволюція стратегічного управління
Еволюція стратегічного управління Разработка показателей оценки эффективности сотрудников отдела управления персоналом (ООО ИНТЕР РАО – Орловский энергосбыт)
Разработка показателей оценки эффективности сотрудников отдела управления персоналом (ООО ИНТЕР РАО – Орловский энергосбыт) Кейс Компания Passioncar. Бизнес модель. Процессный подход
Кейс Компания Passioncar. Бизнес модель. Процессный подход Классификация типов конкурентного поведения фирм инновационного характера
Классификация типов конкурентного поведения фирм инновационного характера Понятие ценностей
Понятие ценностей Обеспечение безопасности продовольственного сырья и пищевых продуктов
Обеспечение безопасности продовольственного сырья и пищевых продуктов История возникновения проектного менеджмента
История возникновения проектного менеджмента Инновационный менеджмент в ОУ
Инновационный менеджмент в ОУ Тема 4. Разработка концепции проекта
Тема 4. Разработка концепции проекта История управления персоналом
История управления персоналом Коучинг в развитии лидеров и команд. Часть 2
Коучинг в развитии лидеров и команд. Часть 2 Матеріали щодо вибору спеціалізацій та дисциплін студентами 2 курсу ФАМ напряму підготовки Менеджмент
Матеріали щодо вибору спеціалізацій та дисциплін студентами 2 курсу ФАМ напряму підготовки Менеджмент 12 миль начинающего манагера
12 миль начинающего манагера Особенности стратегического управления на муниципальном уровне
Особенности стратегического управления на муниципальном уровне Этика социальной ответственности в современном бизнесе
Этика социальной ответственности в современном бизнесе Управление магазином подарков. Урок №11
Управление магазином подарков. Урок №11 Мотивация персонала
Мотивация персонала Комплектация тележки горничной
Комплектация тележки горничной Сутність, методологічні основи та роль менеджменту
Сутність, методологічні основи та роль менеджменту Функции управления персоналом
Функции управления персоналом Определение деловых коммуникаций
Определение деловых коммуникаций Отработка алгоритма встречи потребителей в торговом зале и посадка за стол. Техники приема заказа. Рекомендации блюд и напитков
Отработка алгоритма встречи потребителей в торговом зале и посадка за стол. Техники приема заказа. Рекомендации блюд и напитков Типы и виды организационных структур
Типы и виды организационных структур Производственная программа подразделений и ее ресурсное обеспечение (лекция 7- 8)
Производственная программа подразделений и ее ресурсное обеспечение (лекция 7- 8) Функциональный и процессно-ориентированный подход к управлению деятельностью таможенных органов
Функциональный и процессно-ориентированный подход к управлению деятельностью таможенных органов RUP. Конструирование
RUP. Конструирование Управление персоналом
Управление персоналом